技术特征:
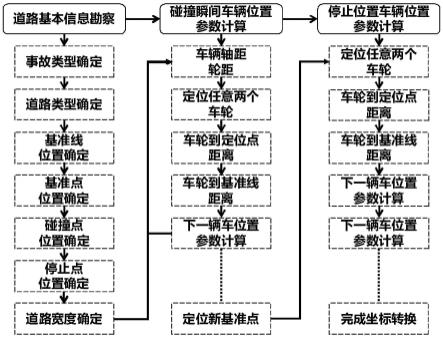
1.一种用于改进crashview系统读取交通事故现场数据的方法,其特征在于,包括以下步骤:基于crashview系统的向导式事故现场勘查流程,完成事故现场各个事故元素位置定位;确定基于crashview系统的事故现场图中各元素坐标值以及其他必要参数值;向导式的事故现场勘察流程为:(1)确定道路类型,事故车辆类型,轮距轴距以及车流方向;(2)确定基准点、基准线;(3)确定碰撞点以及停止点,按综合定位法对这两点进行定位,综合定位法为测量碰撞点到基准点以及基准线的距离,并测量停止点到碰撞点以及基准线的距离;(4)测量事故车辆某一车轮到基准点以及基准线的距离,并测量该车车身与基准线的夹角;或者测量事故车辆任意2个车轮到基准点以及基准线的距离;(5)完成某一待测点定位后,将其作为新的基准点,顺着车流方向,定位下一点,以此类推,直到完成所有需要的待测点定位。2.根据权利要求1所述的用于改进crashview系统读取交通事故现场数据的方法,其特征在于,东西向道路x-y坐标系中各元素的坐标计算表达式为:碰撞点a的坐标为停止点z的坐标为式中,l
az
为碰撞点a与停止点z的距离,m;s
a
为碰撞点a到基准线l的距离,m;s
z
为停止点z到基准线l的距离,m;其余事故元素坐标点计算公式为:式中,x
m
为m横坐标,l
mn
为点m与点n的距离,m;s
m
为m到基准线l的距离,m;s
n
为n到基准线l的距离,m;基准线位于道路北侧的东西向道路x-y坐标系中各元素的坐标计算表达式为:
3.根据权利要求2所述的用于改进crashview系统读取交通事故现场数据的方法,其特征在于,南北向道路x-y坐标系中各元素的坐标计算表达式为:碰撞点a的坐标为停止点z的坐标为其余事故元素坐标点计算公式为:基准线位于道路西侧时,坐标转换公式如下:4.根据权利要求1所述的用于改进crashview系统读取交通事故现场数据的方法,其特征在于,十字型道路x-y坐标系中各元素的坐标计算表达式为:(1)基准线位于东西向道路南侧,任意一点n的坐标计算公式为:
式中,l
no
为点n到基准点的距离,m;d1为基准点到到基准线1的距离,m;s
n
为n到基准线1的距离,m;(2)基准线位于东西向道路北侧,任意一点n的坐标计算公式为:式中,d2为基准点到到基准线2的距离,m;s
n
为n到基准线2的距离,m;(3)基准线位于南北向道路东侧,任意一点n的坐标计算公式为:式中,d3为基准点到到基准线3的距离,m;s
n
为n到基准线3的距离,m;(4)基准线位于南北向道路西侧,任意一点n的坐标计算公式为:式中,d4为基准点到到基准线4的距离,m;s
n
为n到基准线4的距离,m。5.根据权利要求1所述的用于改进crashview系统读取交通事故现场数据的方法,其特征在于,四轮汽车左前轮坐标及车身与x轴夹角计算表达式为:(1)已知事故车辆左前轮坐标(x
fl
,y
fl
)和车身与x轴夹角α;此条件即为crashview系统进行车速计算时的输入参数;(2)已知事故车辆右前轮坐标(x
fr
,y
fr
)和车身与x轴夹角α:x
fl
=x
fr-w
t
sinαy
fl
=y
fr
w
t
cosα(3)已知事故车辆左后轮坐标(x
bl
,y
bl
)和车身与x轴夹角αx
fl
=x
bl
w
b
cosαy
fl
=y
bl
w
b
sinα(4)已知事故车辆右后轮坐标(x
br
,y
br
)和车身与x轴夹角α;x
fl
=x
br-w
t
sinα w
b
cosα
y
fl
=y
br
w
t
cosα w
b
sinα(5)已知事故车辆左前轮坐标(x
fl
,y
fl
)和右前轮坐标(x
fr
,y
fr
);(6)已知事故车辆左前轮坐标(x
fl
,y
fl
)和右后轮坐标(x
br
,y
br
);(7)已知事故车辆左前轮坐标(x
fl
,y
fl
)和左后轮坐标(x
bl
,y
bl
);(8)已知事故车辆右前轮坐标(x
fr
,y
fr
)和右后轮坐标(x
br
,y
br
);x
fl
=x
fr-w
t
sinαy
fl
=y
fr
w
t
cosα(9)已知事故车辆右前轮坐标(x
fr
,y
fr
)和左后轮坐标(x
bl
,y
bl
);x
fl
=x
bl
w
b
cosαy
fl
=y
bl
w
b
sinα(10)已知事故车辆左后轮坐标(x
bl
,y
bl
)和右后轮坐标(x
br
,y
br
);x
fl
=x
bl
w
b
cosαy
fl
=y
bl
w
b
sinα6.根据权利要求1所述的用于改进crashview系统读取交通事故现场数据的方法,其特征在于,三轮车的坐垫中心坐标及车身与x轴的夹角计算表达式为:(1)已知事故三轮车转向轮坐标(x
tn
,y
tn
)和车身与x轴夹角α;)和车身与x轴夹角α;(2)已知事故三轮车左后轮坐标(x
lb
,y
lb
)和车身与x轴夹角α;)和车身与x轴夹角α;(3)已知事故三轮车右后轮坐标(x
rb
,y
rb
)和车身与x轴夹角α;
(4)已知三轮车转向轮坐标(x
tn
,y
tn
)和左后轮坐标(x
lb
,y
lb
);););(5)已知三轮车转向轮坐标(x
tn
,y
tn
)和右后轮坐标(x
rb
,y
rb
);););(6)已知三轮车左后轮坐标(x
lb
,y
lb
)和右后轮坐标(x
rb
,y
rb
);););7.根据权利要求1所述的用于改进crashview系统读取交通事故现场数据的方法,其特征在于,二轮车的坐垫中心坐标及车身与x轴的夹角计算表达式为:(1)已知事故二轮车前轮坐标(x
qf
,y
qf
)和车身与x轴夹角α;)和车身与x轴夹角α;(2)已知事故二轮车后轮坐标(x
hb
,y
hb
)和车身与x轴夹角α;)和车身与x轴夹角α;(3)已知二轮车前后两个车轮的坐标(x
qf
,y
qf
),(x
hb
,y
hb
)
技术总结
本发明涉及一种用于改进Crashview系统读取交通事故现场数据的方法,建立了以Crashview系统X-Y坐标系为基准的东西向直弯道路,南北向直弯道路,十字形道路,东西向直弯组合道路,南北向直弯组合道路,T型路口等常见道路类型下的坐标转换计算模型,实现了事故现场坐标与Crashview系统坐标的自动转换;建立了四轮汽车、三轮车和二轮车内部坐标互相转换算法模型,极大程度地减少了参数输入量、降低了获取难度;设计了一套适用于Crashview系统的标准化事故现场勘察流程,实现了事故现场位置信息向Crashview系统的无缝衔接,解决了现有的道路交通事故现场勘察信息与Crashview系统进行车速计算所需参数不匹配以及事故现场勘察流程导向性不足等问题,提高了Crashview系统的实用性与可靠性。系统的实用性与可靠性。系统的实用性与可靠性。
技术研发人员:徐峰祥 方腾源 邹震 牛小强
受保护的技术使用者:武汉理工大学
技术研发日:2022.06.20
技术公布日:2022/9/13
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。