1.本发明涉及一种测距方法,尤其是涉及一种雷达测距方法。
背景技术:
2.微波雷达的作用距离远,穿透性好,作用十分广泛。对于调频连续波雷达,其绝对距离的获取,一般是通过对一组中频数据的原始采样傅里叶变换得到,表面来看,这个绝对距离的精度取决于最大不模糊距离和傅里叶变换之后结果的长度,实际上,最终落实在所使用的电磁波的扫频带宽上,即距离分辨率r=c/2b,c为光速,b为扫频带宽。目前的微波雷达带宽一般在几十兆赫兹到几千兆赫兹,因此绝对距离的测距精度在厘米级到米级。虽然可以通过提高扫描带宽来提高测距精度,但是受到电磁波资源的限制,器件的限制,天线的限制等等技术制约,这个效果是极为有限的。
3.虽然微波雷达的绝对测距精度受到制约,一般只能达到厘米级,但是通过干涉技术,微波雷达可以实现亚毫米级甚至更高精度的相对位移测量。这得益于回波信号中包含的相位信息。
4.假设雷达所使用的波长为10厘米,而现代数字处理技术很容易可以获取精度优于0.2度(大约0.0035弧度)的相位信息,于是相对位移精度优于10*0.2/360=0.0056厘米。而目前的技术,这个测量精度仅限于测量相对位移,并未用于测量绝对距离。因为回波信号中的相位信息存在缠绕现象(或称为相位模糊),因此不能直接用于测量目标的绝对距离。
技术实现要素:
5.本发明主要是解决现有技术所存在的技术问题;提供了一种实施容易,可以有效提高微波雷达的绝对距离测量精度,改变了微波雷达难以精确测量绝对距离的状况,配合成像雷达,能够生成精密点云。可以广泛应用于目标位移监测、目标精密模型建立等方面的雷达测距方法。
6.本发明的上述技术问题主要是通过下述技术方案得以解决的:
7.一种雷达测距方法,其特征在于,包括:
8.基于调频连续波测距原理进行第一次测量,对测量数据进行傅里叶变换(fft)后获取回波信号中得到的粗精度距离,并获取对应的第一次相位值;
9.基于调频连续波测距原理进行第二次测量,对测量数据进行傅里叶变换后获取对应的第二次相位值;
10.将第一次相位值和第二次相位值做差得到相位差,获取精确绝对距离=粗精度距离数据 相位差*精度系数。
11.其中,需要满足两次测量的频率差的波长等于fft阱分辨率的两倍。在上述的一种雷达测距方法,第一次测量所使用的电磁波波长为l1,频率为f1,扫频带宽为b,频率的相位为w1,粗测距分辨率rc=c/2b,c为光速,目标距离为d;
12.将该次测量的数据进行第一次fft,则目标落入的fft阱序号为int(d/rc),目标落
入距离是d
coarse
=int(d/rc)*rc的fft阱中,在int(d/rc)的fft变换阱处的第一次相位值w1。
13.在上述的一种雷达测距方法,第二次测量,此时使用的电磁波波长为l2,将该次测量的数据进行第二次fft,获得第二次测量结果的fft数据的int(d/rc)fft阱处的第二次相位w2。
14.在上述的一种雷达测距方法,满足两次测量的频率差的波长等于fft阱分辨率的两倍,即l1-l2=(l1*l2*b)/c,或l2-l1=(l1*l2*b)/c。
15.在上述的一种雷达测距方法,满足两次测量的频率差的波长等于fft阱分辨率的两倍,即c/(f1-f2)=c/b,或者c/(f2-f1)=c/b。在上述的一种雷达测距方法,所述精度系数包括圆周率pi、光速c以及扫频带宽b,精确绝对距离基于波长为c/b测量d的时候的整周数n为判据,其中,c/b两次测量的波长之差:
16.当n为偶数,d=d
coarse
(w1-w2)*(c/2b)/pi
17.当n为奇数,d=d
coarse
(2*(w1-w2)-1)*(c/2b)/pi
18.其中,d
coarse
通过第一次测量数据的fft得到,w1-w2通过两次测量的相位差得到,c为光速常量,b为带宽。
19.因此,本发明具有如下优点:只需要巧妙设计两次测量的雷达频率,就可以在两次测量之后,将目标绝对距离的精度提高约两个数量级以上,即由原来的厘米级到米级的精度提高到亚毫米,不仅可以满足远距离建模的需求,还可以进行目标的变形监测。
附图说明
20.附图1是本发明的一种方法原理图;
具体实施方式
21.下面通过实施例,并结合附图,对本发明的技术方案作进一步具体的说明。
22.实施例:
23.本发明采用异频多次测量的方法,基于调频连续波技术,通过单次测量回波信号中得到的粗精度距离信息,再通过提取异频信号的相位得到目标的精确绝对距离。使用本方法,可以一次测得视角内所有可观测目标的距离,精度由雷达的相位分辨率决定,一般来说可以轻易做到优于0.1mm。
24.一、首先以非成像实孔径雷达为例说明原理。
25.假设第一次测量所使用的电磁波波长为l1,频率为f1,目标距离为d,扫频带宽为b,则粗测距分辨率rc=c/2b,c为光速。将该次测量的数据做fft,则目标落入的fft阱序号为int(d/rc),即,目标落入距离是d
coarse
=int(d/rc)*rc的fft阱中,d
coarse
即为绝对距离的粗精度值。而我们要求的是d,其与d
coarse
之间的差为:
26.ds=d-d
coarse
=d-int(d/rc)*rc,求得ds即可知道目标的精确距离d。
27.此时在int(d/rc)的fft阱处,可以得到该处的相位值w1。
28.为了求得ds,进行第二次测量,此时使用的电磁波波长为l2,频率为f2要求满足
29.l1-l2=(l1*l2*b)/c,或者l2-l1=(l1*l2*b)/c,这两者没有区别,只不过是l1和l2的顺序不同而已,其根本是使得两次测量的频率差的波长等于fft阱分辨率的两倍,在工
程实践中,可以使用等价的公式,即:
30.c/(f1-f2)=c/b,或者c/(f2-f1)=c/b
31.化简后即可换算到频率,实际上就是f2=f1 b或者f1=f2 b。
32.需要注意的是,按照常规的测距思路,应该使得两次测量的频率差的波长和fft阱的分辨率一致才行。但是这个实施中有一定的技术障碍,对雷达频率合成范围和射频功放、低噪放、天线等部分的带宽要求太高。而采用本方案后,技术难度大大降低,后期计算也只需要增加一个奇数周期补偿步骤即可获取正确的残余相位。
33.第二次测量的扫频带宽仍然为b。
34.由于第二次测量所使用的带宽与第一次的都是b,因此在对第二次的测量数据做fft之后,目标仍然会落入距离是d
coarse
=int(d/rc)*rc的fft阱中。但由于两次测量所使用的波长不同,因此第二次测量结果的fft数据的int(d/rc)fft阱处,其相位w2并不等于w1,而w1和w2的相位差w1-w2,是第一次测量和第二次测量所使用的频率之差的相位,由于两次测量的波长之差是c/b,也就是fft距离分辨率的两倍,故有:
35.d=(n nd)*c/2b=n*c/2b nd*c/2b,n为以波长为c/b测量d的时候的整周数,是自然数,nd为以波长为c/b测量d的时候的剩余周期数,是大于等于0,小于1的小数。
36.常规情况下,我们只能得到nd这个剩余周期数,而n是有模糊度的,无法直接测量得到。nd是以波长c/b为测尺测距的剩余周期数,而w1-w2是第一次测量和第二次测量所使用的频率之差的相位,由于两次测量的波长差为c/b,因此nd=w1-w2。
37.由于前面已经使用第一次的测量结果,通过fft得到了目标的粗略距离d
coarse
,而d
coarse
的分辨率(fft阱分辨率)是c/2b,而我们设定的两次测量所使用的频率差的波长为c/b关系,因此:
38.n*c/2b=d
coarse
39.由于fft阱分辨率是频率差波长的两倍,因此当n是偶数的时候,频率差的相位差是可以直接用于计算精确距离的,而当n是奇数的时候,需要对频率差的相位差做奇数周期补偿,补偿后的周数为nd*2-1。
40.结合上述所有,可得,当n是偶数的时候:
41.d=d
coarse
(w1-w2)*(c/2b)/pi
42.当n是奇数的时候:
43.d=d
coarse
(2*(w1-w2)-1)*(c/2b)/pi
44.(其中pi为圆周率)
45.其中,d
coarse
通过第一次测量数据的fft得到,w1-w2通过两次测量的相位差得到,c为光速常量,pi为圆周率常量,b为带宽,是人为设定的已知量。至此,得到了目标的精确距离。
46.如果接收的反射信号中有多个目标,可以按照上述方法分别处理,分别得到多个目标的精确距离。
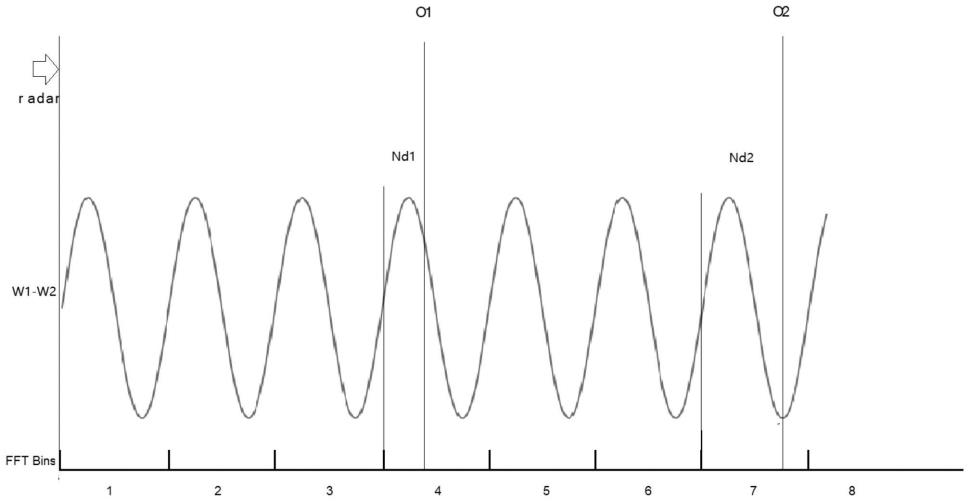
47.下面通过图示说明,为了描述方便,图示的是两次测量的差频波长等于fft阱分辨率。o1和o2为观测目标。横坐标为fft阱(fft bins),是普通雷达所能达到的测距精度,每格的长度为rc=c/2b,其中b为扫频带宽,c为光速。在对原始信号经过fft后,会在3号fft bins和7号fftbins处出现两个尖峰,分别对应的是目标o1和目标o2。,故目标o1和o2的粗略
坐标分别是3和7。w1-w2处所示的波形是两次测量的差频的波形。由于设计的时候,两次测量的频率差的波长为c/b,将两次的测量的数据的fft结果中的相位部分相减,在目标所在的fft阱处的相位差,反映了该目标的nd,对于o1,o2两个目标来说,分别是nd1,nd2。
48.简言之,就是在测量中所使用的尺子,其大格子刻度是单次测量的fft阱,精密小刻度是两次测量的相位差。
49.由于fftbins的距离分辨率有限,因此,凡是距离在n*rc到(n 1)*rc之间的目标(n为自然数),其fft的结果都会落在第n个fft bins上。而o1距离这个的位置的相位差是nd1。
50.对于成像雷达(如合成孔径雷达),只需将处理数据源由fft结果换为复数图像即可,也就是说,非成像雷达处理的数据是两次的测量数据,分别是一个fft结果一维数组,而成像雷达处理的数据是用不同频率两次成像的复数图像,是一个二维数组,处理方法并无不同。
51.最后,由于信号传输和处理有一定延迟,需要用其他手段(例如经过校准的激光测距仪)测量距离的真值,以得到雷达的系统误差进行纠正。
52.二、下面介绍采用上述方法的具体实施例1。
53.本实施例采用精密测距实孔径线性调频雷达测距。
54.第一次测量扫频频率范围10ghz-10.3ghz
55.中心频率f1=10.15ghz,中心波长l1=c/f1=0.02055665m
56.带宽b=10.3-10=10.6-10.3=0.3ghz
57.fft阱分辨率rc=c/2b=0.5m
58.第二次测量扫频频率f2=f1 b=10.45ghz,扫频范围为10.3ghz-10.6ghz
59.两次测量的频率差为b=0.3ghz,对应的波长为1.0m。
60.用频率f1实施第一次测量,得到原始数据数组r1,对得到的原始数据r1进行fft,得到粗略距离信息数组t1。
61.t1数组中的每个幅度峰值,说明在该fft阱处有目标回波。在数组t1中找峰值,每个峰值代表一个目标。
62.查找每个峰值在t1数组中的索引(位置)index,则其对应的目标的粗略距离为:
63.d
coarse
=index*0.5
64.用频率f2实施第二次测量,得到原始数据数组r2,对得到的原始数据r2进行fft,得到t2。
65.提取t1数组中index处元素的相位值w1和ft数组中index处元素的相位值w2,
66.求得两次测量的相位差:
67.pd=w1-w2,如果结果为负,则将结果加一个圆周:
68.pd=pd 2*pi
69.然后将角度转换为周数:
70.nd=pd/pi/2
71.根据index的奇偶性分别处理:
72.当index是偶数的时候,频率差的相位差是可以直接用于计算精确距离的,而当index是奇数的时候,需要对频率差的相位差做奇数周期补偿,补偿后的周数为nd*2-1。
73.最后再将周数转换为距离,并和粗略距离合并得到精确距离:
74.d=index*0.5 nd*c/b
75.d就是该点的精确距离。
76.对于每一个fft峰做如上处理,即可得到视野内所有目标的精确距离。
77.由于微波信号在处理过程中有一定延迟,这些延迟会成为仪器的系统误差。因此在使用前,用经过校准的精密测距设备,得到雷达的原始测量结果和真实距离的差e,把e作为系统误差处理才能得到真实距离:
78.真实距离dr=d-e
79.例如,有一个目标,其所在的fft峰值在t1数组中的索引是100(从1开始计数),索引号为偶数,则:
80.d
coarse
=index*0.5=100*0.5=50m
81.而f1[100]=1 1.732i,f2[100]=1.732 1i
[0082]
则pd=w1-w2=0.5236
[0083]
nd=0.5236/pi/2=0.08333
[0084]
d=50 0.08333*c/b=50.08333m
[0085]
假设测得的e=0.03m
[0086]
则雷达最后输出该目标的距离是:
[0087]
dr=d-e=50.05333m
[0088]
再例如,有一个目标,其所在的fft峰值在t1数组中的索引是101(从1开始计数),索引号为奇数,则:
[0089]dcoarse
=index*0.5=101*0.5=50.5m
[0090]
而f1[101]=1-1.732i,f2[101]=-1 2i
[0091]
则pd=w1-w2=3.219
[0092]
nd=0.5236/pi/2=0.5095
[0093]
d=50.5 (2*0.5095-1)*c/b=50.519m
[0094]
假设测得的e=0.03m
[0095]
则雷达最后输出该目标的距离是:
[0096]
dr=d-e=50.489m
[0097]
二、下面介绍采用上述方法的具体实施例2。
[0098]
本实施例采用精密测距成像雷达测距。
[0099]
第一次测量扫频频率范围10ghz-10.3ghz
[0100]
中心频率f1=10.15ghz,中心波长l1=c/f1=0.02055665m
[0101]
带宽b=10.3-10=10.6-10.3=0.3ghz
[0102]
fft阱分辨率rc=c/2b=0.5m
[0103]
第二次测量扫频频率f2=f1 b=10.45ghz,扫频范围为10.3ghz-10.6ghz
[0104]
两次测量的频率差为b=0.3ghz,对应的波长为1.0m。
[0105]
用频率f1实施第一次测量,得到单视复数图像c1,实际是一个二维复数数组。
[0106]
c1数组中的每个强散射点(高幅值点),说明在该处有目标回波。在数组f1中找感兴趣的强散射点,每个强散射点代表一个目标。假设第一个兴趣点的距离向维度索引(位置)index_x,方位向维度索引为index_y
[0107]
则其对应的目标的粗略距离为:
[0108]dcoarse
=index_x*0.5
[0109]
用频率f2实施第二次测量,得到单视复数图像c2,实际是一个二维复数数组。
[0110]
提取c1数组中[index_x,index_y]处元素的相位值w1和f2数组中[index_x,index_y]处元素的相位值w2,
[0111]
求得两次测量的相位差:
[0112]
pd=w1-w2,如果结果为负,则将结果加一个圆周:
[0113]
pd=pd 2*pi
[0114]
然后将角度转换为周数:
[0115]
nd=pd/pi/2
[0116]
根据index_x的奇偶性分别处理:
[0117]
当index_x是偶数的时候,频率差的相位差是可以直接用于计算精确距离的,而当index_x是奇数的时候,需要对频率差的相位差做奇数周期补偿,补偿后的周数为nd*2-1。
[0118]
最后再将周数转换为距离,并和粗略距离合并得到精确距离:
[0119]
d=index*0.5 nd*c/b
[0120]
d就是该点的精确距离。
[0121]
对于每一个强散射点做如上处理,即可得到视野内所有目标的精确距离。
[0122]
由于微波信号在处理过程中有一定延迟,这些延迟会成为仪器的系统误差。因此在使用前,用经过校准的精密测距设备,得到雷达的原始测量结果和真实距离的差e,把e作为系统误差处理才能得到真实距离:
[0123]
真实距离dr=d-e
[0124]
例如,有一个目标,在c1数组中的索引是[100,200](从1开始计数),index_x索引号为偶数,则:
[0125]dcoarse
=index*0.5=100*0.5=50m
[0126]
而f1[100]=1 1.732i,f2[100]=1.732 1i
[0127]
则pd=w1-w2=0.5236
[0128]
nd=0.5236/pi/2=0.08333
[0129]
d=50 0.08333*c/b=50.08333m
[0130]
假设测得的e=0.03m
[0131]
则雷达最后输出该目标的距离是:
[0132]
dr=d-e=50.05333m
[0133]
再例如,有一个目标,其所在的fft峰值在t1数组中的索引是[101,220](从1开始计数),index_x索引号为奇数,则:
[0134]dcoarse
=index*0.5=101*0.5=50.5m
[0135]
而f1[101]=1-1.732i,f2[101]=-1 2i
[0136]
则pd=w1-w2=3.219
[0137]
nd=0.5236/pi/2=0.5095
[0138]
d=50.5 (2*0.5095-1)*c/b=50.519m
[0139]
假设测得的e=0.03m
[0140]
则雷达最后输出该目标的距离是:
[0141]
dr=d-e=50.489m
[0142]
本文中所描述的具体实施例仅仅是对本发明精神作举例说明。本发明所属技术领域的技术人员可以对所描述的具体实施例做各种各样的修改或补充或采用类似的方式替代,但并不会偏离本发明的精神或者超越所附权利要求书所定义的范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
