1.本发明涉及智慧交通的技术领域,尤其涉及到一种基于分布式鲁棒模型预测的车辆队列横向控制方法。
背景技术:
2.随着汽车保有量的不断增加,交通网络已经接近其所能承载的能力极限。通过增加基础设施建设来增加交通网络容量的方法,无法作为一种能够长期使用的手段。因此,能够提高道路利用率的自动车辆队列驾驶技术,在过去的几十年中得到了发展。车辆队列由一系列能够近距离驾驶的车辆构成,通过车载测量元件或者是车辆间的通信来协调车辆的运动状态。允许近距离驾驶的车辆队列能够增大交通网络的密度,同时也能够减少燃料的消耗。
3.目前车辆队列研究大多关注于车辆的纵向运动控制,然而在日常行驶场景中,除了直线行驶,变道、拐弯等转向运动也极为常见。在这类驾驶场景中,车辆的转向操作通常交由驾驶员进行,但是在高速低间距的条件下,人为的转向操作将可能导致安全问题,因此对车辆队列进行横向控制显得尤为重要。其中,车辆的横向控制过程涉及车辆的质心侧偏角,如果该角过大,车辆将有侧倾的风险,因此控制策略需保证车辆的横向稳定性。同时,由于队列车辆之间具有一定的耦合,前方车辆的状态将影响到后方的车辆,为避免车辆与其它车道的车辆发生碰撞的风险,控制策略需保证车辆队列的横向队列稳定性。实际的道路环境复杂多样,因此控制策略必须具备一定的鲁棒性。
技术实现要素:
4.本发明专利的目的是在扰动存在的情况下,提供一种基于分布式鲁棒模型预测的车辆队列横向控制方法,以满足车辆的横向稳定性及队列的稳定性要求。
5.为实现上述目的,本发明所提供的技术方案为:
6.一种基于分布式鲁棒模型预测的车辆队列横向控制方法,包括以下步骤:
7.s1、确定车辆的参数;
8.s2、基于确定的车辆参数,建立队列车辆的横向动力学模型;
9.s3、基于步骤s2建立的队列车辆的横向动力学模型,设计模型预测控制器用于车辆系统的控制。
10.进一步地,所述步骤s1中,车辆的参数包括固定参数和实时参数;
11.其中,
12.固有参数包括:车辆前后轴到车辆质心的距离lf和lr、车辆的质量m、车辆绕z轴的惯性矩iz、车辆前轮和后轮的侧偏刚度系数c
αf
和c
αr
、系统采样时间τ、车辆受到的外界扰动wi(k)的范围车辆转向角的上界u
i,max
、车辆转向角的下界u
i,min
、车辆横摆角速度的上界车辆横摆角速度的下界可接受的最大横向速度v
y,i,max
、可接受的最小横向速
度v
y,i,min
、最大偏航角ψ
e,i,max
、最小偏航角ψ
e,i,min
、最大横向位移误差y
e,i,max
、最小横向位移误差y
e,i,min
、系统状态的权重矩阵pi、控制输入的权重矩阵qi以及反馈控制率ki;
13.实时参数包括:通过车载速度传感器和陀螺仪获得的车辆横向速度vy以及横摆角速度通过车载处理器获得的车辆与预期路径的横向位移误差ye和偏航角ψe。
14.进一步地,所述步骤s2包括:
15.以车辆队列的第一辆车作为领航车辆,编号0,队列中的其他车辆作为跟随车辆;面对复杂的路况,领航车交由人类驾驶,而跟随车辆则通过控制器实现轨迹跟踪;假设车辆在平滑的路面行驶,忽略车辆的俯仰运动,以二自由度的车辆动力学模型作为控制器设计的依据;车辆以速度v行驶,相较于自身纵轴和横轴的速度分别为v
x
和vy;车辆的前轮转向角为δ,横摆角为ψ,质心侧偏角为β;f
xf
和f
xr
分别表示轮胎前轮和后轮上的纵向力,f
yf
和f
yr
分别表示轮胎前轮和后轮上的横向力;则单个车辆的横向动力学模型如下:
[0016][0017][0018][0019]
其中,为纵轴加速度,为横轴加速度,为横摆角加速度;
[0020]
假设车辆在正常的道路条件下行驶,轮胎工作在侧偏特性的线性区域内,此时轮胎上的横向受力与其侧滑角度α的关系为:
[0021]fyf
=c
αf
αf[0022]fyr
=c
αr
αr[0023]
车辆前后轮的侧滑角α和车辆的质心侧偏角β之间满足:
[0024][0025][0026]
αf为车辆前轮的侧滑角,αr为车辆后轮的侧滑角;
[0027]
车辆的质心侧偏角β表示为:
[0028][0029]
车辆的质心侧偏角小,进行近似,有:
[0030][0031]
[0032]
假设车辆的纵向速度由其纵向控制器保持恒定值,车辆的横向动力学模型表示为:
[0033][0034][0035]
上述模型描述单个车辆的横向运动状态,而在车辆行驶过程中,还要求车辆能够跟踪预期轨迹;路径k为车辆的预期路径,车辆的实际位置与预期路径k之间存在偏差;
[0036]
定义车辆的偏航角ψe为车辆方向与最近路径点s的切线方向之间的夹角:
[0037]
ψe=ψ-θs[0038]
则偏航角速度为:
[0039][0040]
定义车辆的横向位移误差ye为车辆的实际位置与期望位置之间的误差,通过矢量分解可知,横向位移误差的变化率为:
[0041][0042]
车辆的偏航角ψe小,进行小角度近似有:
[0043][0044]
从而得到单车横向跟随模型为:
[0045][0046][0047][0048][0049]
在基于路径的车辆跟随方式下,车辆通过传感器监测前方车辆的位置,并通过车辆间的通信获得在前车在相应位置的横摆角速度信号,以此生成前方车辆的行驶轨迹;车辆通过对路径的跟踪实现对前方车辆的跟随;第i辆车的跟随目标是其当前位置与第i-1车的行驶轨迹最近的点此时车辆将前车在处的横摆角ψ
i-1
作为预期路径的切线方向与水平线之间的夹角,并将前车在s处的横摆角速度信号作为信号,输入到模型中;
[0050]
以s0作为行驶的起点,第i辆车自s0点起行驶的路程si满足:
[0051][0052]
其中,
[0053]
[0054]
在行驶过程中v
x,i
>>v
y,i
,有
[0055][0056]
由v
x,i
(t)=c,c为任意常数,得:
[0057]
si(t)=ct
[0058]
由于车辆的偏航角小,因此车辆在当前时刻的参考信号近似为前方车辆自相同起点下,相同行驶路程的横摆角速度信号;
[0059]
假定该信号与当前时刻存在δt的时间间隔,则:
[0060][0061]
车辆队列的领航车在给定转向角输入后生成行驶轨迹,控制器控制跟随车辆实现队列行驶;取ui(t)=δi(t),假设对任意t<0,都有xi(t)=0,则第i辆跟随车辆的系统状态表述为:
[0062][0063]
其中,
[0064][0065]
由于系统的采样时间为τ,因此第i辆车的系统离散后的结果为:
[0066]
xi(k 1)=gixi(k) hiui(k) i
idi
(k)
[0067]
其中,
[0068]
在实际应用场景中,车辆将不可避免的受到外界扰动的影响;假设外界扰动w(k)有界,则加入扰动后第i辆车的模型为:
[0069]
xi(k 1)=gixi(k) hiui(k) i
idi
(k) wi(k)
[0070]
受车辆自身的限制,车辆的转向角有界,定义u
i,max
为车辆转向角的上界,u
i,min
为车辆转向角的下界,有:
[0071]ui,min
≤ui≤u
i,max
[0072]
上述约束构成控制辆的约束集合
[0073]
在车辆队列行驶过程中,为确保车辆行驶不发生侧倾,质心侧偏角接近于零;因此,给定横向速度vy的上下界,以确保行驶的安全性;同时,为确保车辆的跟随性能,给定横向误差与偏航角的上下界;受路面条件限制,车辆的横摆角速度存在上下界;定义为系统状态的上界,为系统状态的下界,有:
[0074]
x
i,min
≤xi≤x
i,max
[0075]
上述约束构成状态量的约束集合
[0076]
进一步地,通过模型预测控制器对车辆系统进行控制时,还包括用到标称系统、误差系统以及反馈控制器;其中,标称系统和误差系统皆源于车辆系统;模型预测控制器对去扰动作用的标称系统进行控制;反馈控制器对误差系统进行控制。
[0077]
进一步地,对车辆系统进行控制的过程如下:
[0078]
跟随车辆的标称系统不受外界扰动的影响,其表达式如下:
[0079][0080]
其中,为的标称状态,为标称系统下的控制输入,取误差则误差系统表示为:
[0081][0082]
误差系统输出满足:
[0083][0084]
为确保系统状态在扰动作用下的收敛性,误差系统采用反馈控制:
[0085][0086]
此时,误差系统转化为:
[0087][0088][0089]
则标称系统的输入和状态约束为:
[0090][0091]
其中为标称系统的最小鲁棒正不变集:
[0092][0093]
其中α满足α∈[0,1);α与p间满足
[0094]
通过模型预测控制器控制标称系统,令状态序列控制序列其中,表示k时刻预测的k j时刻的系统状态,表示k时刻预测的k j时刻的系统输入;
[0095]
模型预测控制器的优化目标如下:
[0096][0097]
满足如下动力学方程及约束:
[0098][0099]
[0100][0101]
是使得车辆队列横向弦稳定性得到满足时第i辆车的标称系统状态约束集合:
[0102][0103]
其中对于任意i∈[2,n],定义属于集合的满足不等式:
[0104][0105]k*
与时间间隔δt间满足β为类函数;
[0106]
对于第1辆跟随车辆,其状态约束为:
[0107][0108]
集合集合满足:
[0109][0110]
式中σ为类函数;优化目标中每一步的代价函数l以及终端约束vf满足:
[0111][0112][0113]
上式中,pi和qi分别为优化目标中预测状态和输入相对应的加权矩阵,为保证控制器稳定性的终端约束;模型预测控制器在每一步时求解优化问题,获得相应的控制序列,其控制输出为:
[0114][0115]
通过控制输出进行车辆系统控制。
[0116]
与现有技术相比,本方案原理及优点如下:
[0117]
1)本方案考虑了外部道路环境对队列车辆的干扰,通过鲁棒模型预测的方式保证系统实际状态的稳定性。
[0118]
2)本方案通过基于路径的跟随方式,减小一定范围内的通信时延给车辆状态的影响。
附图说明
[0119]
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的服务作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以
根据这些附图获得其他的附图。
[0120]
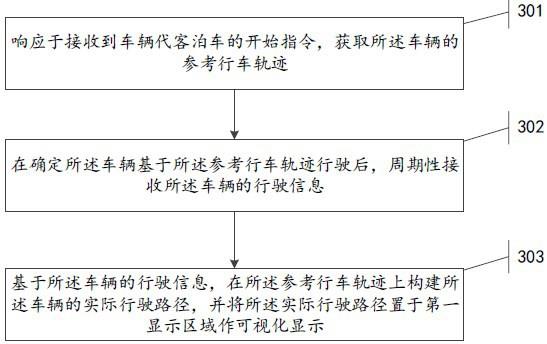
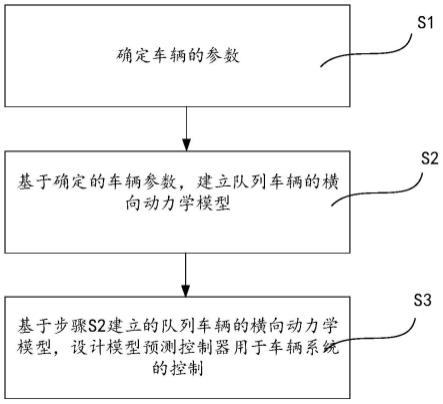
图1为本发明一种基于分布式鲁棒模型预测的车辆队列横向控制方法的原理流程图;
[0121]
图2为二自由度车辆动力学模型;
[0122]
图3为车辆跟随预期路径示意图;
[0123]
图4为车辆跟随示意图;
[0124]
图5为包括有模型预测控制器的控制框架图;
[0125]
图6为领航车行驶轨迹示意图;
[0126]
图7为领航车横摆角速度示意图;
[0127]
图8为跟随车辆状态及行驶轨迹示意图。
具体实施方式
[0128]
下面结合具体实施例对本发明作进一步说明:
[0129]
如图1所示,本实施例所述的一种基于分布式鲁棒模型预测的车辆队列横向控制方法,包括以下步骤:
[0130]
s1、确定车辆的参数;
[0131]
本步骤中,车辆参数包括固定参数和实时参数;
[0132]
其中,
[0133]
固有参数包括:车辆前后轴到车辆质心的距离lf和lr、车辆的质量m、车辆绕z轴的惯性矩iz、车辆前轮和后轮的侧偏刚度系数c
αf
和c
αr
、系统采样时间τ、车辆受到的外界扰动wi(k)的范围车辆转向角的上界u
i,max
、车辆转向角的下界u
i,min
、车辆横摆角速度的上界车辆横摆角速度的下界可接受的最大横向速度v
y,i,max
、可接受的最小横向速度v
y,i,min
、最大偏航角ψ
e,i,max
、最小偏航角ψ
e,i,min
、最大横向位移误差y
e,i,max
、最小横向位移误差y
e,i,min
、系统状态的权重矩阵pi、控制输入的权重矩阵qi以及反馈控制率ki;
[0134]
实时参数包括:通过车载速度传感器和陀螺仪获得的车辆横向速度vy以及横摆角速度通过车载处理器获得的车辆与预期路径的横向位移误差ye和偏航角ψe。
[0135]
s2、基于确定的车辆参数,建立队列车辆的横向动力学模型;具体包括:
[0136]
以车辆队列的第一辆车作为领航车辆,编号0,队列中的其他车辆作为跟随车辆;面对复杂的路况,领航车交由人类驾驶,而跟随车辆则通过控制器实现轨迹跟踪;假设车辆在平滑的路面行驶,忽略车辆的俯仰运动,以二自由度的车辆动力学模型作为控制器设计的依据,车辆的前后轮分别由单个轮胎代替,如图2所示;车辆以速度v行驶,相较于自身纵轴和横轴的速度分别为v
x
和vy;车辆的前轮转向角为δ,横摆角为ψ,质心侧偏角为β;f
xf
和f
xr
分别表示轮胎前轮和后轮上的纵向力,f
yf
和f
yr
分别表示轮胎前轮和后轮上的横向力;则单个车辆的横向动力学模型如下:
[0137][0138]
[0139][0140]
其中,为纵轴加速度,为横轴加速度,为横摆角加速度;
[0141]
假设车辆在正常的道路条件下行驶,轮胎工作在侧偏特性的线性区域内,此时轮胎上的横向受力与其侧滑角度α的关系为:
[0142]fyf
=c
αf
αf[0143]fyr
=c
αr
αr[0144]
车辆前后轮的侧滑角α和车辆的质心侧偏角β之间满足:
[0145][0146][0147]
αf为车辆前轮的侧滑角,αr为车辆后轮的侧滑角;
[0148]
车辆的质心侧偏角β表示为:
[0149][0150]
车辆的质心侧偏角小,进行近似,有:
[0151][0152][0153]
假设车辆的纵向速度由其纵向控制器保持恒定值,车辆的横向动力学模型表示为:
[0154][0155][0156]
上述模型描述单个车辆的横向运动状态,而在车辆行驶过程中,还要求车辆能够跟踪预期轨迹,如图3所示;路径k为车辆的预期路径,车辆的实际位置与预期路径k之间存在偏差;
[0157]
定义车辆的偏航角ψe为车辆方向与最近路径点s的切线方向之间的夹角:
[0158]
ψe=ψ-θs[0159]
则偏航角速度为:
[0160][0161]
定义车辆的横向位移误差ye为车辆的实际位置与期望位置之间的误差,通过矢量
分解可知,横向位移误差的变化率为:
[0162][0163]
车辆的偏航角ψe小,进行小角度近似有:
[0164][0165]
从而得到单车横向跟随模型为:
[0166][0167][0168][0169][0170]
在基于路径的车辆跟随方式下,车辆通过传感器监测前方车辆的位置,并通过车辆间的通信获得在前车在相应位置的横摆角速度信号,以此生成前方车辆的行驶轨迹;车辆通过对路径的跟踪实现对前方车辆的跟随,如图4所示;第i辆车的跟随目标是其当前位置与第i-1车的行驶轨迹最近的点此时车辆将前车在处的横摆角ψ
i-1
作为预期路径的切线方向与水平线之间的夹角,并将前车在处的横摆角速度信号作为信号,输入到模型中;
[0171]
以s0作为行驶的起点,第i辆车自s0点起行驶的路程si满足:
[0172][0173]
其中,
[0174][0175]
在行驶过程中v
x,i
>>v
y,i
,有
[0176][0177]
由v
x,i
(t)=c,c为任意常数,得:
[0178]
si(t)=ct
[0179]
由于车辆的偏航角小,因此车辆在当前时刻的参考信号近似为前方车辆自相同起点下,相同行驶路程的横摆角速度信号;
[0180]
假定该信号与当前时刻存在δt的时间间隔,则:
[0181][0182]
车辆队列的领航车在给定转向角输入后生成行驶轨迹,控制器控制跟随车辆实现队列行驶;取ui(t)=δi(t),假设对任意t<0,都有xi(t)=0,则第i辆跟随车辆的系统状态表述为:
[0183]
[0184]
其中,
[0185][0186]
由于系统的采样时间为τ,因此第i辆车的系统离散后的结果为:
[0187]
xi(k 1)=gixi(k) hiui(k) i
idi
(k)
[0188]
其中,
[0189]
在实际应用场景中,车辆将不可避免的受到外界扰动的影响;假设外界扰动w(k)有界,则加入扰动后第i辆车的模型为:
[0190]
xi(k 1)=gixi(k) hiui(k) i
idi
(k) wi(k)
[0191]
受车辆自身的限制,车辆的转向角有界,定义u
i,max
为车辆转向角的上界,u
i,min
为车辆转向角的下界,有:
[0192]ui,min
≤ui≤u
i,max
[0193]
上述约束构成控制辆的约束集合
[0194]
在车辆队列行驶过程中,为确保车辆行驶不发生侧倾,质心侧偏角接近于零;因此,给定横向速度vy的上下界,以确保行驶的安全性;同时,为确保车辆的跟随性能,给定横向误差与偏航角的上下界;受路面条件限制,车辆的横摆角速度存在上下界;定义为系统状态的上界,为系统状态的下界,有:
[0195]
x
i,min
≤xi≤x
i,max
[0196]
上述约束构成状态量的约束集合
[0197]
s3、基于步骤s2建立的队列车辆的横向动力学模型,设计模型预测控制器用于车辆系统的控制。
[0198]
本步骤中,通过模型预测控制器对车辆系统进行控制时,还包括用到标称系统、误差系统以及反馈控制器;其中,标称系统和误差系统皆源于车辆系统;模型预测控制器对去扰动作用的标称系统进行控制;反馈控制器对误差系统进行控制,如图5所示。
[0199]
具体控制过程如下:
[0200]
跟随车辆的标称系统不受外界扰动的影响,其表达式如下:
[0201][0202]
其中,为的标称状态,为标称系统下的控制输入,取误差则误差系统表示为:
[0203]
[0204]
误差系统输出满足:
[0205][0206]
为确保系统状态在扰动作用下的收敛性,误差系统采用反馈控制:
[0207][0208]
此时,误差系统转化为:
[0209][0210][0211]
则标称系统的输入和状态约束为:
[0212][0213]
其中为标称系统的最小鲁棒正不变集:
[0214][0215]
其中α满足α∈[0,1);α与p间满足
[0216]
通过模型预测控制器控制标称系统,令状态序列控制序列其中,表示k时刻预测的k j时刻的系统状态,表示k时刻预测的k j时刻的系统输入;
[0217]
模型预测控制器的优化目标如下:
[0218][0219]
满足如下动力学方程及约束:
[0220][0221][0222][0223]
是使得车辆队列横向弦稳定性得到满足时第i辆车的标称系统状态约束集合:
[0224][0225]
其中对于任意i∈[2,n],定义属于集合的满足不等式:
[0226][0227]k*
与时间间隔δt间满足β为类函数;
[0228]
对于第1辆跟随车辆,其状态约束为:
[0229][0230]
集合集合满足:
[0231][0232]
式中σ为类函数;优化目标中每一步的代价函数l以及终端约束vf满足:
[0233][0234][0235]
上式中,pi和qi分别为优化目标中预测状态和输入相对应的加权矩阵,为保证控制器稳定性的终端约束;模型预测控制器在每一步时求解优化问题,获得相应的控制序列,其控制输出为:
[0236][0237]
通过控制输出进行车辆系统控制。
[0238]
为证实本发明的有效性,作如下仿真:
[0239]
假设车辆队列由6辆车构成,车辆参数如下:lr=1.6m,lf=1.1m,c
αr
=143000n/rad,c
αf
=117000n/rad,m=1650kg,iz=2900kgm2,v
x
=72km/h。领航车的初始位置(x0,y0)=(20,0),基于路径的跟随方式下的时间间隔δt=1s,连续系统转化为离散系统的采样间隔τ=0.02s,车辆间通信时延τ
*
=0.1s。预测步长n
p
=40,扰动wi为区间[-0.00002,0.00002]内均匀分布的随机噪声。
[0240]
领航车行驶轨迹如图6所示,领航车横摆角速度如图7所示,模型预测控制器作用下的跟随车辆状态及行驶轨迹如图8所示。
[0241]
以上所述之实施例子只为本发明之较佳实施例,并非以此限制本发明的实施范围,故凡依本发明之形状、原理所作的变化,均应涵盖在本发明的保护范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。