技术特征:
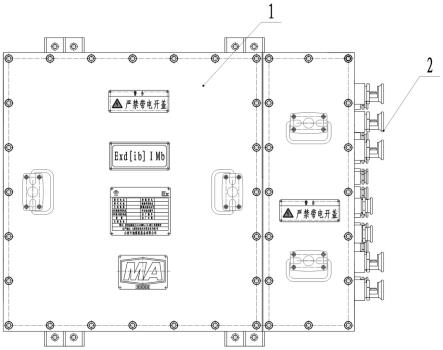
1.一种井下防爆物料运输机器人多智能体控制装置,其特征在于,包括隔爆箱体(1),所述隔爆箱体(1)内设置有接线腔(12)和主腔(13),所述接线腔(12)和主腔(13)之间设置有穿腔端子(10),所述主腔内设置有控制电路,所述隔爆箱体(1)上设置有控制接口和第一通信接口;所述控制电路包括:隔离器、智能逻辑控制器、主设备终端控制器、辅助设备终端控制器、多通信口智能控制器和视觉处理主机;所述智能逻辑控制器和视觉处理主机均通过隔离器与所述多通信口智能控制器通信连接;所述多通信口智能控制器的输出端通过隔离器与主设备终端控制器连接,所述智能逻辑控制器的输出端与辅助设备终端控制器连接;所述主设备终端控制器和辅助设备终端控制器通过所述接线腔(12)后连接所述控制接口,所述控制接口用于连接外部设备终端;所述多通信口智能控制器通过隔离器、接线腔(12)后与所述第一通信接口连接,所述第一通信接口用于连接外部传感器终端;所述视觉处理主机用于接收机器人传感器终端发送的传感信号,以及获取得到的防爆运输机器人行驶状态信息,计算得到最优路径规划,并将对应的第一控制信号发送至所述多通信口智能控制器;所述多通信口智能控制器用于接收视觉处理主机发送的第一控制信号和外部传感器终端发送的传感信号,并根据控制信号和传感信号,计算得到最终的第二控制信号后发送给所述主设备终端控制器和智能逻辑控制器;所述智能逻辑控制器的输入输出端经接线腔(12)后通过所述控制接口与急停开关、制动比例阀和解制动电磁阀连接,用于根据多通信口智能控制器发送的第二控制信号控制所述制动比例阀和解制动电磁阀的动作,还用于根据所述急停开关发送的急停信号,控制所述制动比例阀动作。2.根据权利要求1所述的一种井下防爆物料运输机器人多智能体控制装置,其特征在于,所述隔离器为can隔离栅,所述第一通信接口包括lan接口和can通信接口;所述控制电路还包括交换机,所述交换机与所述视觉处理主机连接,所述传感器终端发送的图像信号通过lan接口、接线腔(12)后与所述交换机连接;所述传感器终端发送的雷达信号通过can通信接口、接线腔后,通过can隔离栅与所述视觉处理主机和多通信口智能控制器连接。3.根据权利要求1所述的一种井下防爆物料运输机器人多智能体控制装置,其特征在于,所述主设备终端控制器包括行走电机控制器和转向电机控制器,所述行走电机控制器和转向电机控制器通过所述接线腔(12)和控制端口后分别连接行走电机和控制电机;所述辅助设备终端控制器包括油泵电机控制器;油泵电机控制器通过所述接线腔(12)和控制端口后连接油泵电机。4.根据权利要求1所述的一种井下防爆物料运输机器人多智能体控制装置,其特征在于,所述控制电路还包括风扇电机控制器和灯光控制器,所述智能逻辑控制器的输出端与灯光控制器连接,用于向灯光控制器输出控制信号,所述灯光控制器的输出端通过接线腔(12)、控制接口连接照明灯。5.根据权利要求1所述的一种井下防爆物料运输机器人多智能体控制装置,其特征在于,还包括无线通信定位模块和移动通信模块;所述无线通信定位模块与所述交换机lan连接,用于将实时定位信息发送至集控中心,所述移动通信模块与所述多通信口智能控制器
连接,用于将防爆运输机器人的实时状态参数信息发送至集控中心。6.根据权利要求1所述的一种井下防爆物料运输机器人多智能体控制装置,其特征在于,所述主腔(13)内还设置有开关电源,所述隔爆箱体(1)上还设置有电源输入端子,所述开关电源的输入端通过所述电源端子与外接电源连接,用于进行电压转换后输出直流电压给所述隔离器、智能逻辑控制器、多通信口智能控制器和视觉处理主机供电。7.根据权利要求6所述的一种井下防爆物料运输机器人多智能体控制装置,其特征在于,所述主腔(13)内还设置有电源控制板,所述隔爆箱体(1)上设置有电源输出端子,所述电源控制板的输入端与开关电源的输出端连接,输出端与所述电源输出端子连接,用于向所述传感器终端提供5v直流供电。8.根据权利要求1所述的一种井下防爆物料运输机器人多智能体控制装置,其特征在于,所述隔爆箱体(1)上还设置有用于连接综合保护装置的第二通信接口,所述多通信口智能控制器通过隔离器、接线腔(12)后与所述第二通信接口连接;所述多通信口智能控制器还用于根据所述综合保护装置发送的保护信号,计算得到最终的第二控制信号后发送给转向电机控制器、行走电机控制器和智能逻辑控制器。9.根据权利要求1所述的一种井下防爆物料运输机器人多智能体控制装置,其特征在于,所述隔爆箱体(1)上还设置有用于连接外接电源的通信端子的第三通信接口,所述多通信口智能控制器通过隔离器、接线腔(12)后与所述第三通信接口连接,用于监测外接电池的工作状态。10.根据权利要求1所述的一种井下防爆物料运输机器人多智能体控制装置,其特征在于,还包括显示模块,所述显示模块设置在隔爆箱体(1)上,并通过所述接线腔(12)与所述视觉处理主机连接。
技术总结
本发明属于井下防爆运输机器人控制技术领域,具体涉及一种井下防爆物料运输机器人多智能体控制装置,包括隔爆箱体,所述隔爆箱体内设置有接线腔和主腔,所述主腔内设置有控制电路,所述隔爆箱体上设置有控制接口和第一通信接口;所述控制电路包括:隔离器、智能逻辑控制器、主设备终端控制器、辅助设备终端控制器、多通信口智能控制器和视觉处理主机;所述智能逻辑控制器和视觉处理主机均通过隔离器与所述多通信口智能控制器通信连接;本发明可以实现煤矿井下运输机器人的自主行走,自主避障、路径规划,数据上传等功能,提高运输机器人的可靠性。可靠性。可靠性。
技术研发人员:周德华 郭志俊 赵远 毕跃起 陈利东 布朋生 郝明锐 陈寇忠 郝志军 刘玉荣 刘德宁 肖洪彬 薛慧珍 龙先江 王俊秀
受保护的技术使用者:山西天地煤机装备有限公司
技术研发日:2022.06.15
技术公布日:2022/9/13
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。