1.本发明涉及石油开采技术领域,尤其涉及一种提高自扶正效果的水力锚。
背景技术:
2.在石油开采中需要用到水力锚,其主要用于油水井采油、注水、压裂等施工时,在套管的预设位置上锚定油管柱,防止油管柱与套管产生相对位移。待施工作业完成后,通过动作使得水力锚和套管分离,即解锚,继续上提或下放油管。
3.所述的水力锚包括圆筒形的锚体,所述的锚体中间具有空腔,这个空腔是锚体空腔,所述锚体空腔内具有钢球座,还有可以放置在钢球座上的钢球,所述的钢球放置在钢球座上可以使锚体空腔形成封闭的结构;在锚体周围还有多个安装锚牙座的空腔,这些空腔是锚牙座空腔,还有锚牙座安装在锚牙座空腔内,所述的锚牙座具有锚柱安装空腔,还有锚柱安装在锚柱安装空腔内。
4.中国专利公开号:cn113123747a。公开了一种防卡液压水力锚,包括中心管,防卡液压水力锚还包括:锚定机构,包括在中心管的径向上可移动以进行锚定或解除锚定的卡瓦;用于驱动卡瓦进行锚定的液压致动机构;用于向液压致动机构施加使其离开卡瓦的力的第一解锚机构;和用于解除中心管相对于锚定机构的锁定状态以允许中心管相对于锚定机构轴向运动的第二解锚机构。本发明的防卡液压水力锚可以克服常规防卡液压水力锚在超高温超高压酸性油气田应用时容易发生密封泄露、锚爪卡死难以解锚等难题,其具有密封可靠、可重复锚定、多种解锚方式保障可靠性等优点,适用于超高温超高压酸性油气田。由此可见所述防卡液压水力锚存在以下问题:水力锚的扶正效果不好和工作精准度和效率不够高的问题。
技术实现要素:
5.为此,本发明提供一种提高自扶正效果的水力锚,用以克服现有技术中水力锚的扶正效果不好和工作精准度和效率不够高的问题。
6.为实现上述目的,本发明提供一种提高自扶正效果的水力锚,包括:锚体,用于对水力锚进行整体固定;弹簧模块,其与所述锚体相连,用于将锚爪弹出和将锚爪收回;锚爪,其与所述弹簧模块相连,用于对管柱的锚定;密封圈,其设置于所述锚体中,用于对密封槽进行密封;中控模块,其分别与所述弹簧模块以及锚爪相连,用于根据弹簧模块中的检测装置测得的外界参数判定是否将所述弹簧模块和锚爪中的运行参数调节至对应值;中控模块在弹簧模块运行时根据推动压力和工作温度值判定是否调节锚爪的伸长长度或调节系统的预设工作压差并在完成对于锚爪伸长长度的调节以及系统的预设工作压差的调节时根据弹簧弹力差值和预设最大弹簧弹力差值判定是否调节锚爪回收等级或是否对弹簧进行更换。
7.进一步地,所述中控模块设有预设第一推动压力f1、预设第二推动压力f2,其中f1<f2,在对水力锚的使用开始前,中控模块根据设置于水力锚中的压力传感器检测到的实
际推动压力与预设推动压力的对比结果对是否将锚爪伸出进行初步判定,
8.若f≤f1,所述中控模块判定实际推动压力低于允许范围并控制锚爪原地不动;
9.若f1<f≤f2,所述中控模块判定实际推动压力在允许范围内并计算实际推动压力与预设推动压力的差值
△
f并根据
△
f与预设推动压力的差值的对比结果将锚爪的伸长长度调节至对应值,设定
△
f=f-f1;
10.若f>f2,所述中控模块判定实际推动压力在允许范围内并控制锚爪直接伸长至套管内壁。
11.进一步地,所述中控模块设有预设第一推动压力差值
△
f1、预设第二推动压力差值
△
f2、预设第一锚爪伸长长度调节系数α1、预设第二锚爪伸长长度调节系数α2以及预设锚爪伸长长度l0,其中,
△
f1<
△
f2,1<α1<α2,当中控模块完成对于是否将锚爪伸出的初步判定时根据实际推动压力与预设推动压力的差值与预设推动压力差值的对比结果将锚爪的伸长长度调节至对应值,
12.若
△
f≤
△
f1,所述中控模块判定实际推动压力与预设推动压力的差值低于允许范围并不对所述锚爪进行伸长;
13.若
△
f1<
△
f≤
△
f2,所述中控模块判定实际推动压力与预设推动压力的差值在允许范围内并使用α1对所述锚爪的伸长长度进行调节,调节后的锚爪的伸长长度记为l1,设定l1=α1
×
l0;
14.若
△
f>
△
f2,所述中控模块判定实际推动压力与预设推动压力的差值在允许范围内并使用α2对所述锚爪的伸长长度进行调节,调节后的锚爪的伸长长度记为l2,设定l2=α2
×
l0。
15.进一步地,所述中控模块设有预设第一工作温度t1和预设第二工作温度t2,其中t1<t2,当中控模块完成对于锚爪伸长长度的调节时根据设置于水力锚中的温度传感器检测到的实际工作温度与预设工作温度的对比结果对是否对系统预设工作压差p0进行调节进行初步判定,
16.若t≤t1,所述中控模块判定实际工作温度低于允许范围并计算实际工作温度与预设工作温度的差值
△
t并根据
△
t与预设工作温度差值的对比结果将所述系统预设工作压差调节至对应值,设定
△
t=t1-t;
17.若t1<t≤t2,所述中控模块判定实际温度在允许范围内并不对所述系统预设工作压差进行调节;
18.若t>t2,所述中控模块判定实际温度超出允许范围并发出水力锚工作异常警报通知。
19.进一步地,所述中控模块设有预设第一工作温度差值
△
t1、预设第二工作温度差值
△
t2、预设的第一系统预设工作压差调节系数β1、预设第二系统预设工作压差调节系数β2以及预设系统工作压差p0,其中,
△
t1<
△
t2,1<β1<β2,当中控模块完成对于是否对系统工作压差进行调节的初步判定时,中控模块根据实际温度与预设工作温度的差值与预设工作温度差值的对比结果将所述系统预设工作压差调节至对应值,
20.若
△
t≤
△
t1,所述中控模块判定实际温度与预设工作温度的差值在允许范围内并不对所述系统预设工作压差进行调节;
21.若
△
t1<
△
t≤
△
t2,所述中控模块判定实际温度与预设工作温度的差值超出允
许范围并使用β1对所述系统预设工作压差进行调节。调节后的系统预设工作压差记为p1,设定p1=β1
×
p0;
22.若
△
t>
△
t2,所述中控模块判定实际温度与预设工作温度的差值超出允许范围并使用β2对所述系统预设工作压差进行调节,调节后的系统预设工作压差记为p2,设定p2=β2
×
p0。
23.进一步地,所述中控模块设有预设最大工作温度差值
△
tmax,当中控模块完成对于所述系统工作压差的调节时,中控模块根据实际温度与预设工作温度的差值与预设最大工作温度差值的对比结果对水力锚是否发生故障进行判定,
24.若
△
t≤
△
tmax,所述中控模块判定实际温度与预设工作温度的差值在允许范围内并不发出水力锚故障警报;
25.若
△
t>
△
tmax,所述中控模块判定实际温度与预设工作温度的差值超出允许范围并发出水力锚设备故障警报。
26.进一步地,当所述中控模块完成对于水力锚的预设工作压差的调节时,在水力锚正常工作过程中,中控模块根据设置于井口的油压传感器检测到的油压与设置于套管上的压力传感器检测到的套管压力的差值对是否消失对锚爪是否收回复位进行判定,
27.若油压与套管压力差值未消失,所述中控模块判定不对锚爪进行收回复位;
28.若油压与套管压力差值消失,所述中控模块判定对锚爪进行收回复位操作。
29.进一步地,所述中控模块设有预设第一弹簧弹力q1、预设第二弹簧弹力q2,中控模块根据设置于弹簧模块中的弹力检测器检测到的实际弹簧弹力q与预设弹簧弹力的对比结果对所述水力锚的锚爪回收等级进行初步判定,
30.若q≤q1,所述中控模块判定实际弹簧弹力低于允许范围并计算实际弹簧弹力与预设弹簧弹力的差值
△
q并根据
△
q与预设弹簧弹力的差值的对比结果将所述水力锚的锚爪回收等级调节至对应值;
31.若q1<q≤q2,所述中控模块判定实际弹簧弹力在允许范围内并将所述弹簧弹力值发送至云端进行存储;
32.若q>q2,所述中控模块判定实际弹簧弹力在允许范围内并控制所述水力锚正常工作。
33.进一步地,所述中控模块设有预设第一弹簧弹力差值
△
q1、预设第二弹簧弹力差值
△
q2、预设第一锚爪回收等级调节系数k1、预设第二锚爪回收等级调节系数k2以及预设猫抓回收等级e0,其中,
△
q1<
△
q2,0<k1<k2<1,当中控模块完成对于所述是否对锚爪回收等级进行调节的初步判定时,中控模块根据实际弹簧弹力与预设弹簧弹力的差值与预设弹簧弹力差值的对比结果将所述锚爪回收等级调节至对应值,
34.若
△
q≤
△
q1,所述中控模块判定实际弹簧弹力与预设弹簧弹力的差值在允许范围内并不对所述锚爪的回收等级进行调节;
35.若
△
q1<
△
q≤
△
q2,所述中控模块判定实际弹簧弹力与预设弹簧弹力的差值超出允许范围并使用k2对所述锚爪的回收等级进行调节,调节后的锚爪回收等级记为e1,设定e1=k2
×
e0;
36.若
△
q>
△
q2,所述中控模块判定实际弹簧弹力与预设弹簧弹力的差值超出允许范围并使用k1对所述锚爪的回收等级进行调节,调节后的锚爪回收等级记为e2,设定e2=
k1
×
e0。
37.进一步地,所述中控模块设有预设最大弹簧弹力差值
△
qmax,中控模块根据
△
q与预设最大弹簧弹力差值的对比结果对是否更换弹簧进行判定,
38.若
△
q≤
△
qmax,所述中控模块判定实际弹簧弹力与预设弹簧弹力的差值在允许范围内并不发出更换弹簧通知;
39.若
△
q>
△
qmax,所述中控模块判定弹力弹力不符合实际要求并发出更换弹簧通知。
40.与现有技术相比,本发明的有益效果在于,本发明通过设置预设推动压力、预设推动压力差值、预设锚爪伸长长度、预设锚爪伸长长度调节系数、预设工作温度、预设工作温度差值、预设弹簧弹力、预设弹簧弹力差值以及预设最大弹簧弹力差值,可以根据推动压力、实际工作温度以及工作温度差值判定对是否调节锚爪的伸长长度或是否调节系统的预设工作压差并根据弹簧弹力和弹簧弹力差值判定是否调节锚爪的回收等级或是否更换弹簧,提高了水力锚的自扶正效果和提高了水力锚工作的精准度和效率,实现了对水力锚的扶正效果的提高和工作精准度和效率的提高。
41.进一步地,本发明通过设置预设第一推动压力和预设第二推动压力,可以根据实际压力与预设推动压力的对比结果对是否将会猫爪伸出进行初步判定,提高了对于锚爪是否伸出的精准感知和判断能力,进一步实现了对水力锚的扶正效果的提高和工作精准度和效率的提高。
42.进一步地,本发明通过设置预设第一推动压力差值、预设第二推动压力差值、预设第一锚爪伸长长度调节系数、预设第二锚爪伸长长度调节系数以及预设锚爪伸长长度,可以根据实际压力与预设推动压力的差值与预设推动压力差值的对比结果将锚爪的伸长长度调节至对应值,提高了对于锚爪伸长长度精准调节能力,进一步实现了对水力锚的扶正效果的提高和工作精准度和效率的提高。
43.进一步地,本发明通过设置预设第一工作温度和预设第二工作温度,可以根据实际温度与预设工作温度的对比结果对是否对系统预设工作压差进行调节进行初步判定,实现了对于系统参数的初步调节的判定,进一步实现了对水力锚的扶正效果的提高和工作精准度和效率的提高。
44.进一步地,本发明通过设置预设第一工作温度差值、预设第二工作温度差值、预设的第一系统预设工作压差调节系数、预设第二系统预设工作压差调节系数以及预设系统工作压差,可以根据实际温度与预设工作温度的差值与预设工作温度差值的对比结果将所述系统预设工作压差调节至对应值,提高了对于工作温度对于工作的影响的精准检测和相关参数的精准调节,进一步实现了对水力锚的扶正效果的提高和工作精准度和效率的提高。
45.进一步地,本发明通过设置预设最大工作温度差值,可以根据实际温度与预设工作温度的差值与预设最大工作温度差值的对比结果对水力锚是否发生故障进行判定,提高了对于故障的精准检测能力,进一步实现了对水力锚的扶正效果的提高和工作精准度和效率的提高。
46.进一步地,本发明通过对是否对锚爪收回复位的判定,提高了对于锚爪的收回的精准判定,进一步实现了对水力锚的扶正效果的提高和工作精准度和效率的提高。
47.进一步地,本发明通过设置预设第一弹簧弹力和预设第二弹簧弹力,可以根据实
际弹簧弹力与预设弹簧弹力的对比结果对所述水力锚的锚爪回收等级进行初步判定,提高了对于锚爪回收等级的精准调节,进一步实现了对水力锚的扶正效果的提高和工作精准度和效率的提高。
48.进一步地,本发明通过设置预设第一弹簧弹力差值、预设第二弹簧弹力差值、预设第一锚爪回收等级调节系数、预设第二锚爪回收等级调节系数以及预设猫抓回收等级,可以根据实际弹簧弹力与预设弹簧弹力的差值与预设弹簧弹力差值的对比结果将所述锚爪回收等级调节至对应值,提高了对于锚爪回收能力的精准检测,进一步实现了对水力锚的扶正效果的提高和工作精准度和效率的提高。
49.进一步地,本发明通过设置预设最大弹簧弹力差值,可以根据实际弹簧弹力与预设弹簧弹力的差值与预设最大弹簧弹力差值的对比结果对是否更换弹簧进行判定,提高了弹簧的精准检测和更换,进一步实现了对水力锚的扶正效果的提高和工作精准度和效率的提高。
附图说明
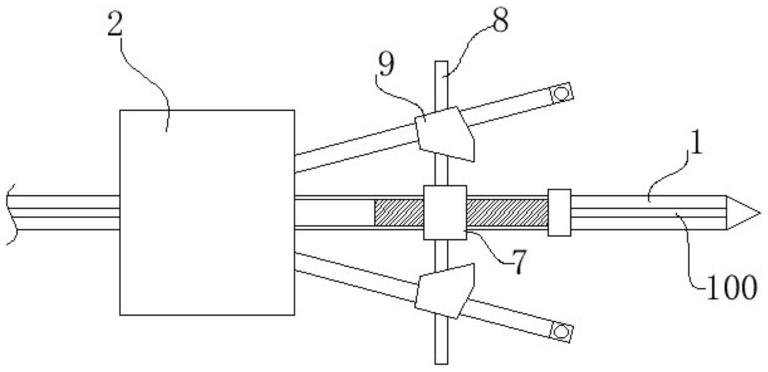
50.图1为本发明所述一种提高自扶正效果的水力锚的结构框图;
具体实施方式
51.为了使本发明的目的和优点更加清楚明白,下面结合实施例对本发明作进一步描述;应当理解,此处所描述的具体实施例仅仅用于解释本发明,并不用于限定本发明。
52.下面参照附图来描述本发明的优选实施方式。本领域技术人员应当理解的是,这些实施方式仅仅用于解释本发明的技术原理,并非在限制本发明的保护范围。
53.请参阅图1所示,一种提高自扶正效果的水力锚,包括:
54.锚体1,用于对水力锚进行整体固定;
55.弹簧模块5,其与所述锚体1相连,用于将锚爪6弹出和将锚爪收回;
56.锚爪6,其与所述弹簧模块5相连,用于对管柱的锚定;
57.密封圈2,其设置于所述锚体1中,用于对密封槽进行密封;
58.中控模块,其分别与所述弹簧模块以及锚爪相连,用于根据弹簧模块中的检测装置测得的外界参数判定是否将所述弹簧模块和锚爪中的运行参数调节至对应值;中控模块在弹簧模块运行时根据推动压力和工作温度值判定是否调节锚爪的伸长长度或调节系统的预设工作压差并在完成对于锚爪伸长长度的调节以及系统的预设工作压差的调节时根据弹簧弹力差值和预设最大弹簧弹力差值判定是否调节锚爪回收等级或是否对弹簧进行更换。
59.本发明通过设置预设推动压力、预设推动压力差值、预设锚爪伸长长度、预设锚爪伸长长度调节系数、预设工作温度、预设工作温度差值、预设弹簧弹力、预设弹簧弹力差值以及预设最大弹簧弹力差值,可以根据推动压力、实际工作温度以及工作温度差值判定对是否调节锚爪的伸长长度或是否调节系统的预设工作压差并根据弹簧弹力和弹簧弹力差值判定是否调节锚爪的回收等级或是否更换弹簧,提高了水力锚的自扶正效果和提高了水力锚工作的精准度和效率,实现了对水力锚的扶正效果的提高和工作精准度和效率的提高。
60.请继续参阅图1所示,所述中控模块设有预设第一推动压力f1、预设第二推动压力f2,其中f1<f2,在对水力锚的使用开始前,中控模块根据设置于水力锚中的压力传感器4检测到的实际推动压力与预设推动压力的对比结果对是否将锚爪伸出进行初步判定,
61.若f≤f1,所述中控模块判定实际推动压力低于允许范围并控制锚爪原地不动;
62.若f1<f≤f2,所述中控模块判定实际推动压力在允许范围内并计算实际推动压力与预设推动压力的差值
△
f并根据
△
f与预设推动压力的差值的对比结果将锚爪的伸长长度调节至对应值,设定
△
f=f-f1;
63.若f>f2,所述中控模块判定实际推动压力在允许范围内并控制锚爪直接伸长至套管内壁。
64.本发明通过设置预设第一推动压力和预设第二推动压力,可以根据实际压力与预设推动压力的对比结果对是否将会猫爪伸出进行初步判定,提高了对于锚爪是否伸出的精准感知和判断能力,进一步实现了对水力锚的扶正效果的提高和工作精准度和效率的提高。
65.请继续参阅图1所示,所述中控模块设有预设第一推动压力差值
△
f1、预设第二推动压力差值
△
f2、预设第一锚爪伸长长度调节系数α1、预设第二锚爪伸长长度调节系数α2以及预设锚爪伸长长度l0,其中,
△
f1<
△
f2,1<α1<α2,当中控模块完成对于是否将锚爪伸出的初步判定时根据实际推动压力与预设推动压力的差值与预设推动压力差值的对比结果将锚爪的伸长长度调节至对应值,
66.若
△
f≤
△
f1,所述中控模块判定实际推动压力与预设推动压力的差值低于允许范围并不对所述锚爪进行伸长;
67.若
△
f1<
△
f≤
△
f2,所述中控模块判定实际推动压力与预设推动压力的差值在允许范围内并使用α1对所述锚爪的伸长长度进行调节,调节后的锚爪的伸长长度记为l1,设定l1=α1
×
l0;
68.若
△
f>
△
f2,所述中控模块判定实际推动压力与预设推动压力的差值在允许范围内并使用α2对所述锚爪的伸长长度进行调节,调节后的锚爪的伸长长度记为l2,设定l2=α2
×
l0。
69.本发明通过设置预设第一推动压力差值、预设第二推动压力差值、预设第一锚爪伸长长度调节系数、预设第二锚爪伸长长度调节系数以及预设锚爪伸长长度,可以根据实际压力与预设推动压力的差值与预设推动压力差值的对比结果将锚爪的伸长长度调节至对应值,提高了对于锚爪伸长长度精准调节能力,进一步实现了对水力锚的扶正效果的提高和工作精准度和效率的提高。
70.请继续参阅图1所示,所述中控模块设有预设第一工作温度t1和预设第二工作温度t2,其中t1<t2,当中控模块完成对于锚爪伸长长度的调节时根据设置于水力锚中的温度传感器3检测到的实际工作温度与预设工作温度的对比结果对是否对系统预设工作压差p0进行调节进行初步判定,
71.若t≤t1,所述中控模块判定实际工作温度低于允许范围并计算实际工作温度与预设工作温度的差值
△
t并根据
△
t与预设工作温度差值的对比结果将所述系统预设工作压差调节至对应值,设定
△
t=t1-t;
72.若t1<t≤t2,所述中控模块判定实际温度在允许范围内并不对所述系统预设工
作压差进行调节;
73.若t>t2,所述中控模块判定实际温度超出允许范围并发出水力锚工作异常警报通知。
74.本发明通过设置预设第一工作温度和预设第二工作温度,可以根据实际温度与预设工作温度的对比结果对是否对系统预设工作压差进行调节进行初步判定,实现了对于系统参数的初步调节的判定,进一步实现了对水力锚的扶正效果的提高和工作精准度和效率的提高。
75.请继续参阅图1所示,所述中控模块设有预设第一工作温度差值
△
t1、预设第二工作温度差值
△
t2、预设的第一系统预设工作压差调节系数β1、预设第二系统预设工作压差调节系数β2以及预设系统工作压差p0,其中,
△
t1<
△
t2,1<β1<β2,当中控模块完成对于是否对系统工作压差进行调节的初步判定时,中控模块根据实际温度与预设工作温度的差值与预设工作温度差值的对比结果将所述系统预设工作压差调节至对应值,
76.若
△
t≤
△
t1,所述中控模块判定实际温度与预设工作温度的差值在允许范围内并不对所述系统预设工作压差进行调节;
77.若
△
t1<
△
t≤
△
t2,所述中控模块判定实际温度与预设工作温度的差值超出允许范围并使用β1对所述系统预设工作压差进行调节。调节后的系统预设工作压差记为p1,设定p1=β1
×
p0;
78.若
△
t>
△
t2,所述中控模块判定实际温度与预设工作温度的差值超出允许范围并使用β2对所述系统预设工作压差进行调节。调节后的系统预设工作压差记为p2,设定p2=β2
×
p0。
79.本发明通过设置预设第一工作温度差值、预设第二工作温度差值、预设的第一系统预设工作压差调节系数、预设第二系统预设工作压差调节系数以及预设系统工作压差,可以根据实际温度与预设工作温度的差值与预设工作温度差值的对比结果将所述系统预设工作压差调节至对应值,提高了对于工作温度对于工作的影响的精准检测和相关参数的精准调节,进一步实现了对水力锚的扶正效果的提高和工作精准度和效率的提高。
80.请继续参阅图1所示,所述中控模块设有预设最大工作温度差值
△
tmax,当中控模块完成对于所述系统工作压差的调节时,中控模块根据实际温度与预设工作温度的差值与预设最大工作温度差值的对比结果对水力锚是否发生故障进行判定,
81.若
△
t≤
△
tmax,所述中控模块判定实际温度与预设工作温度的差值在允许范围内并不发出水力锚故障警报;
82.若
△
t>
△
tmax,所述中控模块判定实际温度与预设工作温度的差值超出允许范围并发出水力锚设备故障警报。
83.本发明通过设置预设最大工作温度差值,可以根据实际温度与预设工作温度的差值与预设最大工作温度差值的对比结果对水力锚是否发生故障进行判定,提高了对于故障的精准检测能力,进一步实现了对水力锚的扶正效果的提高和工作精准度和效率的提高。
84.请继续参阅图1所示,当所述中控模块完成对于水力锚的预设工作压差的调节时,在水力锚正常工作过程中,中控模块根据设置于井口的油压传感器检测到的油压与设置于套管上的压力传感器检测到的套管压力的差值对是否消失对锚爪是否收回复位进行判定,
85.若油压与套管压力差值未消失,所述中控模块判定不对锚爪进行收回复位;
86.若油压与套管压力差值消失,所述中控模块判定对锚爪进行收回复位操作。
87.本发明通过对是否对锚爪收回复位的判定,提高了对于锚爪的收回的精准判定,进一步实现了对水力锚的扶正效果的提高和工作精准度和效率的提高。
88.请继续参阅图1所示,所述中控模块设有预设第一弹簧弹力q1、预设第二弹簧弹力q2,中控模块根据设置于弹簧模块中的弹力检测器7检测到的实际弹簧弹力q与预设弹簧弹力的对比结果对所述水力锚的锚爪回收等级进行初步判定,
89.若q≤q1,所述中控模块判定实际弹簧弹力低于允许范围并计算实际弹簧弹力与预设弹簧弹力的差值
△
q并根据
△
q与预设弹簧弹力的差值的对比结果将所述水力锚的锚爪回收等级调节至对应值;
90.若q1<q≤q2,所述中控模块判定实际弹簧弹力在允许范围内并将所述弹簧弹力值发送至云端进行存储;
91.若q>q2,所述中控模块判定实际弹簧弹力在允许范围内并控制所述水力锚正常工作。
92.本发明通过设置预设第一弹簧弹力和预设第二弹簧弹力,可以根据实际弹簧弹力与预设弹簧弹力的对比结果对所述水力锚的锚爪回收等级进行初步判定,提高了对于锚爪回收等级的精准调节,进一步实现了对水力锚的扶正效果的提高和工作精准度和效率的提高。
93.请继续参阅图1所示,所述中控模块设有预设第一弹簧弹力差值
△
q1、预设第二弹簧弹力差值
△
q2、预设第一锚爪回收等级调节系数k1、预设第二锚爪回收等级调节系数k2以及预设猫抓回收等级e0,其中,
△
q1<
△
q2,0<k1<k2<1,当中控模块完成对于所述是否对锚爪回收等级进行调节的初步判定时,中控模块根据实际弹簧弹力与预设弹簧弹力的差值与预设弹簧弹力差值的对比结果将所述锚爪回收等级调节至对应值,
94.若
△
q≤
△
q1,所述中控模块判定实际弹簧弹力与预设弹簧弹力的差值在允许范围内并不对所述锚爪的回收等级进行调节;
95.若
△
q1<
△
q≤
△
q2,所述中控模块判定实际弹簧弹力与预设弹簧弹力的差值超出允许范围并使用k2对所述锚爪的回收等级进行调节,调节后的锚爪回收等级记为e1,设定e1=k2
×
e0;
96.若
△
q>
△
q2,所述中控模块判定实际弹簧弹力与预设弹簧弹力的差值超出允许范围并使用k1对所述锚爪的回收等级进行调节,调节后的锚爪回收等级记为e2,设定e2=k1
×
e0。
97.本发明通过设置预设第一弹簧弹力差值、预设第二弹簧弹力差值、预设第一锚爪回收等级调节系数、预设第二锚爪回收等级调节系数以及预设猫抓回收等级,可以根据实际弹簧弹力与预设弹簧弹力的差值与预设弹簧弹力差值的对比结果将所述锚爪回收等级调节至对应值,提高了对于锚爪回收能力的精准检测,进一步实现了对水力锚的扶正效果的提高和工作精准度和效率的提高。
98.请继续参阅图1所示,所述中控模块设有预设最大弹簧弹力差值
△
qmax,中控模块根据
△
q与预设最大弹簧弹力差值的对比结果对是否更换弹簧进行判定,
99.若
△
q≤
△
qmax,所述中控模块判定实际弹簧弹力与预设弹簧弹力的差值在允许范围内并不发出更换弹簧通知;
100.若
△
q>
△
qmax,所述中控模块判定弹力弹力不符合实际要求并发出更换弹簧通知。
101.本发明通过设置预设最大弹簧弹力差值,可以根据实际弹簧弹力与预设弹簧弹力的差值与预设最大弹簧弹力差值的对比结果对是否更换弹簧进行判定,提高了弹簧的精准检测和更换,进一步实现了对水力锚的扶正效果的提高和工作精准度和效率的提高。
102.至此,已经结合附图所示的优选实施方式描述了本发明的技术方案,但是,本领域技术人员容易理解的是,本发明的保护范围显然不局限于这些具体实施方式。在不偏离本发明的原理的前提下,本领域技术人员可以对相关技术特征做出等同的更改或替换,这些更改或替换之后的技术方案都将落入本发明的保护范围之内。
103.以上所述仅为本发明的优选实施例,并不用于限制本发明;对于本领域的技术人员来说,本发明可以有各种更改和变化。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。