技术特征:
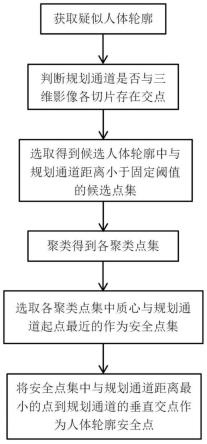
1.人体轮廓安全点计算方法,其特征在于:包括:获取三维影像各切片中的疑似人体轮廓;在三维影像上规划手术通道得到规划通道;判断规划通道与各切片是否相交,并据此确定候选人体轮廓;选取候选人体轮廓中与规划通道之间距离小于第一阈值的轮廓点形成候选点集;设定第二阈值对候选点集进行聚类得到聚类点集,并计算得到其中质心与规划通道起点最近的聚类点集作为安全点集;选取安全点集中与规划通道距离最小的点,并计算得到其到规划通道的垂直交点作为人体轮廓安全点。2.根据权利要求1所述的人体轮廓安全点计算方法,其特征在于:确定候选人体轮廓具体为:若规划通道与各切片所在平面有交点,则选取规划通道与各切片的交点中与规划通道起点距离最近的点,在各交点中搜索与该点距离小于搜索阈值的交点得到各候选交点,搜索阈值根据规划通道起点与终点之间的欧式距离设置,以各候选交点所在切片中的人体轮廓作为候选人体轮廓;若规划通道与各切片所在平面无交点,则选取与规划通道距离最近的切片中的人体轮廓作为候选人体轮廓。3.根据权利要求2所述的人体轮廓安全点计算方法,其特征在于:所述规划通道起点与终点之间的欧式距离为l,所述搜索阈值s设为l/3。4.根据权利要求2所述的人体轮廓安全点计算方法,其特征在于:形成候选点集的步骤具体为:若规划通道与各切片所在平面有交点,遍历各候选交点所在平面对应的切片中的人体轮廓的轮廓点,计算该些轮廓点与规划通道所在直线的距离,将距离小于固定阈值的轮廓点存入集合得到候选点集;若规划通道与各切片所在平面无交点,计算候选人体轮廓中的人体轮廓点与规划通道距离,将距离小于固定阈值的点存入集合得到候选点集。5.根据权利要求4所述的人体轮廓安全点计算方法,其特征在于:所述固定阈值设为36mm。6.根据权利要求2所述的人体轮廓安全点计算方法,其特征在于:判断规划通道与各切片是否相交具体为:根据规划通道得到其起点a和终点b在影像坐标系中的坐标分别为(x
a
,y
a
,z
a
)和(x
b
,y
b
,z
b
),则规划通道向量某一切片所在平面的法向量为u=(x
u
,y
u
,z
u
),则判断k=u
·
v的绝对值是否小于设定阈值,若小于,则认为规划通道与平面平行,二者无交点;否则,认为二者有交点。7.根据权利要求6所述的人体轮廓安全点计算方法,其特征在于:所述设定阈值为0.001。8.根据权利要求6所述的人体轮廓安全点计算方法,其特征在于:规划通道与各切片所在平面的交点p
t
(x
t
,y
t
,z
t
)计算如下:
平面上某一点坐标为p
i
(x
i
,y
i
,z
i
),则m=((x
i-x
a
)*x
u
(y
i-y
a
)*y
u
(z
i-z
a
)*z
u
)/kx
t
=x
a
xv*my
t
=y
a
yv*mz
t
=z
a
zv*m从而计算得到规划通道与每一切片所在平面的交点。9.根据权利要求4所述的人体轮廓安全点计算方法,其特征在于:设定第二阈值对候选点集进行聚类具体为:1)寻找种子点;选择候选点集中的一个点作为第一个种子点,并放入点集合中;遍历得到候选点集中与点集合c1中的种子点的距离大于第二阈值的,点作为另一个种子点并放入另一个点集合c2中;遍历候选点集中与所有点集合中的种子点距离均大于第二阈值的点并存入点集合cn中,最终得到所有满足要求的点集合c1、c2、
…
、cn;2)根据种子点进行聚类;遍历候选点集,计算当前点与各点集合ci的种子点之间的距离,将该点存入距离最近的种子点对应的点集合ci中,得到每个种子点的聚类点集合di。10.根据权利要求9所述的人体轮廓安全点计算方法,其特征在于:计算聚类点集的质心为:其中,p表示某一聚类点集的质心,j表示某一聚类点集中点的索引,p
j
表示某一聚类点集中第j个点的坐标,n表示某一聚类点集中点的个数。11.根据权利要求1所述的人体轮廓安全点计算方法,其特征在于:在设定第二阈值对候选点集进行聚类后还包括筛选步骤:计算每个得到的聚类点集中所包含的点的个数,保留个数最多的前n个聚类点集,删除其他聚类点集;其中,n≥2。12.根据权利要求1、9或11所述的人体轮廓安全点计算方法,其特征在于:所述第二阈值为100mm。13.根据权利要求1所述的人体轮廓安全点计算方法,其特征在于:所述获取疑似人体轮廓具体为:找到三维影像的所有切片中人体的外轮廓,并将其中外轮廓的点数小于设定值的轮廓删除,得到疑似人体轮廓,所述设定值为200。
技术总结
本发明公开了人体轮廓安全点计算方法,包括:获取三维影像各切片中的疑似人体轮廓;在三维影像上规划手术通道得到规划通道;判断规划通道与各切片是否相交,并据此确定候选人体轮廓;选取候选人体轮廓中与规划通道之间距离小于第一阈值的轮廓点形成候选点集;设定第二阈值对候选点集进行聚类得到聚类点集,并计算得到其中质心与规划通道起点最近的聚类点集作为安全点集;选取安全点集中与规划通道距离最小的点,并计算得到其到规划通道的垂直交点作为人体轮廓安全点。本发明根据医生规划的通道自动计算出规划通道与人体轮廓的安全交点,以该交点作为机械臂执行到位的参考点,既能够减少医生的工作量、提高手术的安全性、提高手术的精准度。术的精准度。术的精准度。
技术研发人员:曹红洋
受保护的技术使用者:南京佗道医疗科技有限公司
技术研发日:2022.06.21
技术公布日:2022/9/13
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。