技术特征:
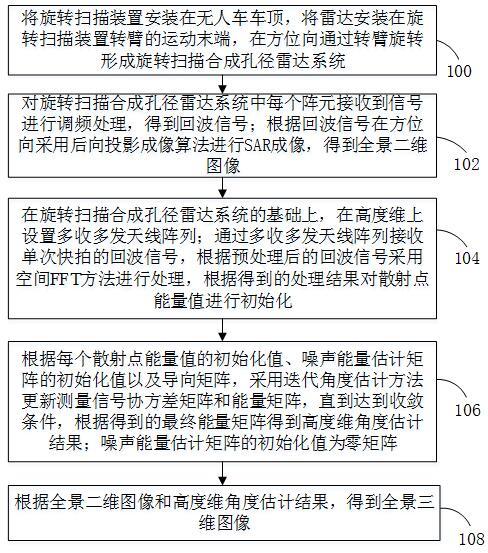
1.一种无人驾驶车三维全景感知方法,其特征在于,所述方法包括:将旋转扫描装置安装在无人车车顶,将雷达安装在旋转扫描装置转臂的运动末端,在方位向通过转臂旋转形成旋转扫描合成孔径雷达系统;对旋转扫描合成孔径雷达系统中每个阵元接收到信号进行调频处理,得到回波信号;根据所述回波信号在方位向采用后向投影成像算法进行sar成像,得到全景二维图像;在旋转扫描合成孔径雷达系统的基础上,在高度维上设置多收多发天线阵列;通过多收多发天线阵列接收单次快拍的回波信号,根据预处理后的回波信号采用空间fft方法进行处理,根据得到的处理结果对散射点能量值进行初始化;根据每个散射点能量值的初始化值、噪声能量估计矩阵的初始化值以及导向矩阵,采用迭代角度估计方法更新测量信号协方差矩阵和能量矩阵,直到达到收敛条件,根据得到的最终能量矩阵得到高度维角度估计结果;噪声能量估计矩阵的初始化值为零矩阵;根据所述全景二维图像和所述高度维角度估计结果,得到全景三维图像。2.根据权利要求1所述的方法,其特征在于,对旋转扫描合成孔径雷达系统中每个阵元接收到信号进行调频处理,得到回波信号;根据所述回波信号在方位向采用后向投影成像算法进行sar成像,得到全景二维图像,包括:对旋转扫描合成孔径雷达系统中每个阵元接收到的回波信号进行调频处理,得到距离向脉冲压缩处理的数据;对探测范围进行网格化,得到每个网格的坐标;计算整个探测范围与雷达天线之间的信号时间差,根据信号时间差计算距离门;根据所述距离门选择角度范围的方位向数据,然后选择同样角度范围的窗函数对此段数据进行插值处理,得到目标点q处的数据值;计算雷达到所有网格点的距离,并计算所有网格点相对于目标点的延迟时间,根据所述延迟时间确定回波信号相对于发射信号的延迟相位,并根据所述延迟相位对目标点q处的数据值进行相位补偿;对雷达系统能接受到目标点q的回波信号的一段圆弧轨迹上的每个位置的雷达回波数据进行相应的插值重采样,并进行相位补充,将相位补充后的回波数据相干累加,得到目标点q的回波幅度值;对整个场景中的所有像素点都采用后向投影成像算法进行sar成像,得到每个像素点的回波幅度值,输出整幅二维图像。3.根据权利要求1所述的方法,其特征在于,噪声能量估计矩阵的初始化值为零矩阵;根据每个散射点能量值的初始化值、噪声能量估计矩阵的初始化值以及导向矩阵,采用迭代角度估计方法更新测量信号协方差矩阵和能量矩阵,直到达到收敛条件,根据得到的最终能量矩阵得到高度维角度估计结果,包括:设置预设迭代次数;根据每个散射点能量值的初始化值、噪声能量估计矩阵的初始化值、测量信号协方差矩阵以及导向矩阵,采用迭代公式进行迭代计算,直至满足预设迭代次数要求,得到最终能量矩阵;所述迭代公式为:
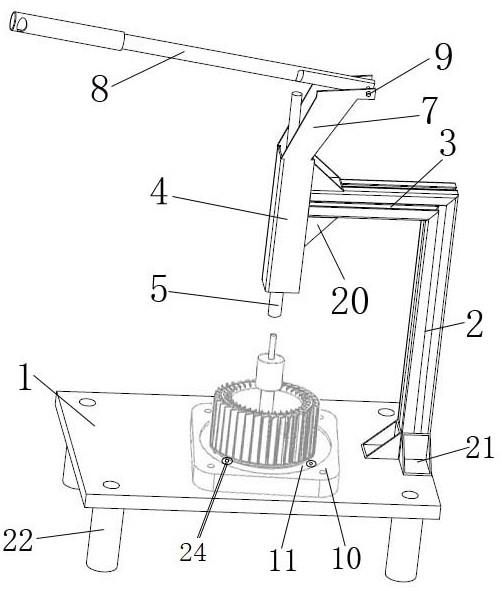
其中,为第n次迭代得到的能量矩阵对角线上的第l个元素,为遍历角度的划分数量,a为导向矩阵,上标h为共轭转置,为第n次迭代得到的测量信号协方差矩阵,为单位矩阵的第m列,是第n次迭代噪声能量估计矩阵中对角线上的第m个元素,为阵元的数量,为接收到的回波数据;为角度为的导向矢量;n为迭代次数,n为大于等于1且小于等于预设迭代次数的整数;根据最终能量矩阵得到复散射回波系数,将每一个散射系数对应到跨航迹方向的分辨单元,得到高度维角度估计结果。4.一种无人驾驶车三维全景感知雷达系统,其特征在于,所述系统用于采用权利要求1-3任一项所述无人驾驶车三维全景感知方法实现无人驾驶车的三维全景感知,所述系统包括:信号处理显示分系统、阵列雷达和旋转机械装置;所述阵列雷达的收发天线是多收多发天线阵列;所述阵列雷达安装在转臂的运动末端,所述多收多发天线阵列垂直转臂末端方向放置;所述阵列雷达与所述信号处理显示分系统连接;所述旋转机械装置,包括转台、基座、转臂、旋转电机和通信控制单元;所述基座是所述旋转电机、所述通信控制单元的安装容器,所述转臂通过轴承与所述转台固定,所述转台安装在所述基座上,所述旋转电机与所述轴承连接;所述旋转电机用于在通信控制单元的控制下驱动所述转臂旋转;所述通信控制单元与所述阵列雷达和所述信号处理显示分系统连接;所述信号处理显示分系统安装在所述旋转机械装置近端或远端,包括控制模块、信号处理模块、显示模块以及历史数据存储数据库,所述控制模块用于接收用户的控制指令,产生控制所述旋转机械装置和所述阵列雷达的命令,并分别发送至所述通信控制单元和所述阵列雷达;所述信号处理模块用于实时接收所述阵列雷达输出的雷达信号,根据所述雷达信号进行二维全景成像处理和高度维的角度估计,得到全景三维图像;所述显示模块用于显示信号处理模块输出的处理结果,所述历史数据存储数据库用于存储探测结果。
5.根据权利要求4所述的系统,其特征在于,所述阵列雷达是调频连续波雷达,还包括:宽带频率源、发射机、接收机、ad采集、参考信号、以及信号预处理模块,所述宽带频率源,用于在信号处理显示分系统发送的控制命令的控制下,根据参考信号调制出发射机所需的宽带雷达波形;所述发射机,用于将所述宽带雷达波形与参考波形进行混频、滤波后进行功率放大,得到发射雷达信号;所述多收多发天线阵列中的发射天线用于将所述发射雷达信号发射到无人驾驶车周围环境,接收天线用于将目标的回波散射信息收集并传输至接收机;所述接收机,用于将回波信号滤波、放大后,与发射机参考信号做解调接收,形成中频信号,并输入至ad采集板;所述ad采集板,用于将所述中频信号减小模数转换后输入至信号预处理模块;所述信号预处理模块,用于对接收到的信息进行脉冲压缩处理,并将处理后的信号输入至信号处理显示分系统。6.根据权利要求4所述的系统,其特征在于,所述多收多发天线阵列采用频分/码分复用的方案,不同天线阵元的发射波形从频率或者编码方式上进行区分,所述信号处理显示分系统通过指令控制宽带频率源,使不同的发射阵元工作在不同频率上或者采用不同的编码发射波形。7.根据权利要求4所述的系统,其特征在于,所述通信控制单元用于连接处理显示分系统与阵列雷达,传输命令和测量数据,还用于接收信号处理显示分系统的命令,控制旋转机械装置的旋转,从而使得信号处理显示分系统、阵列雷达和旋转机械装置同步协调工作。8.根据权利要求4所述的系统,其特征在于,所述控制模块根据用户的控制指令产生的控制旋转机械装置和阵列雷达工作所需的命令包括:转台同步旋转、同步发射、同步接收;开始、暂停与结束工作;工作参数、工作模式切换;系统自检与校准。9.根据权利要求4所述的系统,其特征在于,所述信号处理显示分系统,还用于根据实时接收的所述阵列雷达输出的雷达信号,完成近海目标检测、参数提取、高分辨成像、多目标跟踪的高级雷达信号处理任务。10.根据权利要求4所述的系统,其特征在于,当所述信号处理显示分系统安装在所述旋转机械装置的远端时,所述信号处理显示分系统通过数据链路与所述旋转机械装置连接。
技术总结
本申请涉及车载环境感知技术领域的一种无人驾驶车三维全景感知方法和雷达系统。该方法包括:将旋转扫描装置安装在无人车车顶,将雷达安装在旋转扫描装置转臂的运动末端,在方位向通过转臂旋转形成旋转扫描合成孔径雷达系统,在高度向通过多收多发天线阵列来获取高度信息;弧形轨迹扫描的有效视角为360度,且在方位向上的分辨率显著高于实孔径阵列;该方法是基于二维全景旋转扫描合成孔径雷达系统,比常规二维实孔径阵列雷达具有更好的视场范围和方位向分辨率;针对阵元在单一位置上只能接收到单次快拍回波信号的问题,采用迭代角度估计方法提高角度分辨率。采用本方法能对无人车周围目标进行三维全景高分辨成像,满足目标识别处理的要求。别处理的要求。别处理的要求。
技术研发人员:王建 华洋晟 黄晓涛 范崇祎 李悦丽 周智敏 安道祥 金添 陈乐平 冯东 辛勤 戴永鹏 宋勇平 陈雨微
受保护的技术使用者:中国人民解放军国防科技大学
技术研发日:2022.08.16
技术公布日:2022/9/13
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。