技术特征:
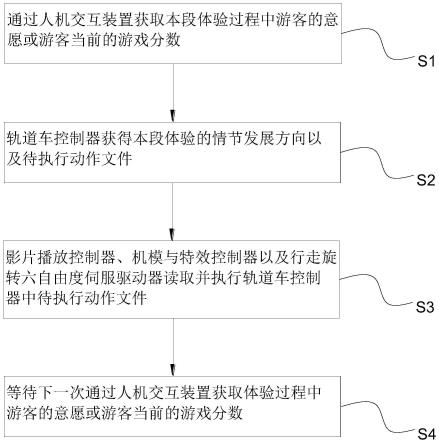
1.交互式轨道车控制方法,其特征在于,包括如下步骤:s1、通过人机交互装置获取本段体验过程中游客的意愿或游客当前的游戏分数;s2、轨道车控制器获得本段体验的情节发展方向以及待执行动作文件,获取方式为:通过游客的意愿或游客当前的游戏分数,判断轨道车的情节发展方向,并通过情节发展方向调用对应的动作文件为待执行动作文件;s3、影片播放控制器、机模与特效控制器以及行走旋转六自由度伺服驱动器按照如下步骤读取并执行轨道车控制器中待执行动作文件:s31、设待执行动作文件中有n条动作指令,i的初始值为0;s32、从前到后依次读取待执行动作文件中m条动作指令为当前执行包,m<n,且计算i=i 1;s33、从前到后依次执行当前执行包中m条动作指令;s34、判断是否是n>i*m,若是,则进行步骤s32;若否,则进行步骤s4;s4、等待下一次通过人机交互装置获取体验过程中游客的意愿或游客当前的游戏分数。2.根据权利要求1所述的交互式轨道车控制方法,其特征在于,s32中从前到后依次读取待执行动作文件中m条动作指令为当前执行包为读取步骤,步骤s32中计算i=i 1在读取步骤执行完后执行,读取步骤包括如下步骤:s321、判断n-i*m是否大于等于m,若是,则进行步骤s322;若否,则进行步骤s323;s322、读取待执行动作文件中第i*m 1至第i*m m个动作指令;s323、读取待执行动作文件中第i*m 1至第n个动作指令;s324、结束。3.根据权利要求2所述的交互式轨道车控制方法,其特征在于,设j的初始值为0,步骤s33按照以下步骤执行:s331、计算j=j 1;s332、执行当前执行包中第j条动作指令;s333、判断是否已经执行完,包括如下步骤:s3331、判断是否执行了s323,若是,则进行步骤s3332;若否,则进行步骤s3333;s3332、判断j是否等于n-(i-1)*m,若是,则进行步骤s334;若否,则进行步骤s331;s3333、步骤j是否等于m,若是,则进行步骤s334;若否,则进行步骤s331;s334、结束。整个步骤实现了将当前执行包内动作指令执行完,保证按照指定的工作毫无遗漏地执行。4.交互式轨道车控制系统,其特征在于,包括:人机交互装置,其用于获取本次体验过程中游客的意愿或游客当前的游戏分数;轨道车控制器,其内包括:存储模块、情节方向决定模块以及动作调用模块;存储模块内存储有若干个情节,每个情节包括若干个子情节,每个子情节对应一个动作文件,每个动作文件内包括:n条动作指令;情节方向决定模块用于通过游客的意愿或游客当前的游戏分数判断轨道车的情节发展方向;动作调用模块用于通过情节发展方向调用对应的动作文件为待执行动作文件;影片播放控制器,其根据轨道车控制器获得待执行动作文件进行影片播放;
机模与特效控制器,其根据轨道车控制器获得待执行动作文件进行机模与特效控制;以及行走旋转六自由度伺服驱动器,其根据轨道车控制器获得待执行动作文件进行控制行走、旋转、六自由度电机动作。
技术总结
本发明首先公开了一种交互式轨道车控制方法,包括如下步骤:S1、通过人机交互装置获取本段体验过程中游客的意愿或游客当前的游戏分数;S2、轨道车控制器获得本段体验的情节发展方向及待执行动作文件,获取方式为:通过游客的意愿或游客当前的游戏分数,判断轨道车的情节发展方向,并通过情节发展方向调用对应的动作文件为待执行动作文件;S3、影片播放控制器、机模与特效控制器及行走旋转六自由度伺服驱动器读取并执行轨道车控制器中待执行动作文件:S4、等待下一次通过人机交互装置获取体验过程中游客的意愿或游客当前的游戏分数。该交互式轨道车控制方法及系统解决现有技术中交互式轨道车在动作文件加载时产生让人能感受的停顿的问题。受的停顿的问题。受的停顿的问题。
技术研发人员:李云鹏 解登传
受保护的技术使用者:上海恒润文化科技有限公司
技术研发日:2022.06.08
技术公布日:2022/9/6
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。