1.本发明涉及系留无人机高抗风技术领域,特别是涉及一种高抗风多涵道式系留无人机及其控制方法。
背景技术:
2.系留无人机是一种通过系留线缆可无人机持续供电,具有长时滞空特点,可广泛用于通信中继、光电侦察监视、无线电侦测等领域的新型无人机。现有的系留无人机通过控制多旋翼的转速,改变无人机的姿态,调节垂直和水平两个方向升力,抵消水平和垂直方向的风阻,实现抗风功能,但抗风能力差,最大抗风能力为6级,风力大于6级时,无人机容易倾翻,发生坠机,严重限制系留无人机的应用场合。
技术实现要素:
3.本发明的目的是提供一种高抗风多涵道式系留无人机及其控制方法,以解决现有的系留无人机抗风能力差,风力大时,容易倾翻,发生坠机的问题。
4.为实现上述目的,本发明提供了如下方案:
5.一种高抗风多涵道式系留无人机,包括:飞行控制系统、系留线缆控制装置、系留线缆、机体、固定涵道机构、全动涵道机构和电动转轴机构;
6.所述固定涵道机构,安装在所述机体上方;
7.所述电动转轴机构安装在所述机体的底部;
8.所述全动涵道机构,与所述电动转轴机构连接,能够绕所述电动转轴机构旋转,轴线与所述固定涵道机构的轴线相互垂直;
9.所述飞行控制系统包括处理器和设置于所述机体上的惯性测量单元、位置传感器、速度传感器、高度传感器和风速风向传感器;
10.所述处理器用于:根据所述惯性测量单元、所述位置传感器、所述高度传感器和所述速度传感器测量得到的传感信息以及所述风速风向传感器测量的风速和风向信息调节所述电动转轴机构的转动角度、所述全动涵道机构的转速以及所述固定涵道机构的转速,以调整无人机的姿态及位置;根据所述风速风向传感器测量的风向信息和风速信息调节所述电动转轴机构的转动角度、所述全动涵道机构的转速以及所述固定涵道机构的转速,以使无人机实现对风阻力的抵抗。
11.可选地,所述固定涵道机构数量至少为四个,且四个所述固定涵道机构呈矩形分布。
12.可选地,所述系留线缆控制装置包括系留基座、转轴电机、转轴控制器、拉力传感器和绕线转轴;
13.所述系留线缆的一端缠绕在所述绕线转轴上;所述绕线转轴的一端与所述转轴电机的输出轴连接,所述绕线转轴的另一端安装有所述拉力传感器;所述拉力传感器的输出信号端与所述转轴控制器连接。
14.可选地,还包括:安装支架;所述安装支架安装在所述机体底部,用于对所述系留线缆进行固定。
15.可选地,还包括:定向信号接收天线、天线基座和天线转轴;
16.所述定向信号接收天线通过所述天线转轴安装在所述天线基座上,所述天线基座底端安装在所述机体上。
17.一种上述的高抗风多涵道式系留无人机的控制方法,包括:
18.通过风速风向传感器测量当前风速信息和当前风向信息;
19.通过位置传感器测量无人机当前水平位置信息;
20.根据预设水平位置和所述当前水平位置信息得到水平位置变化信息;
21.调节电动转轴机构的转动角度,以使全动涵道机构提供的推力方向指向预设水平位置;根据所述水平位置变化信息以及所述风速风向传感器测量的当前风速信息调节所述全动涵道机构转动速度,以使无人机在水平风向上提供推力使无人机恢复至预设水平位置;
22.当无人机恢复至预设水平位置后,根据风速风向传感器测量的当前风向信息调节电动转轴机构的转动角度,以使全动涵道机构提供的推力方向与水平面风阻力方向相反,根据风速风向传感器测量的当前风速信息调节所述全动涵道机构转动速度,以使无人机在水平风向上抵抗风速。
23.可选地,还包括:
24.通过惯性测量单元测量无人机机体的当前俯仰姿态;
25.根据预设俯仰姿态以及所述惯性测量单元测量的俯仰姿态,对俯仰姿态对应的固定涵道机构的转动速度进行控制,以调整无人机的俯仰姿态。
26.可选地,还包括:
27.通过所述惯性测量单元测量无人机机体的当前滚转姿态;
28.根据预设滚转姿态以及所述惯性测量单元测量的滚转姿态,对滚转姿态对应的固定涵道机构的转动速度进行控制,以调整无人机的滚转姿态。
29.可选地,还包括:
30.通过所述惯性测量单元测量无人机机体的当前航向姿态;
31.根据预设航向姿态以及所述惯性测量单元测量的当前航向姿态,对航向姿态对应的固定涵道机构的转动速度进行控制,以调整无人机的航向姿态。
32.可选地,还包括:
33.通过高度传感器测量无人机当前高度信息;
34.根据预设高度信息以及所述高度传感器测量的当前高度信息,对所有固定涵道机构的转动速度进行控制,以使无人机的高度恢复至预设高度。
35.根据本发明提供的具体实施例,本发明公开了以下技术效果:本发明提供了一种高抗风多涵道式系留无人机及其控制方法,包括:飞行控制系统、系留线缆控制装置、系留线缆、机体、固定涵道机构、全动涵道机构和电动转轴机构;所述固定涵道机构,安装在所述机体上方;所述电动转轴机构安装在所述机体的底部;所述全动涵道机构,与所述电动转轴机构连接,能够绕所述电动转轴机构旋转,轴线与所述固定涵道机构的轴线相互垂直;所述飞行控制系统包括处理器和设置于所述机体上的惯性测量单元、位置传感器、速度传感器、
高度传感器和风速风向传感器;所述处理器用于:根据所述惯性测量单元、所述位置传感器、所述高度传感器和所述速度传感器测量得到的传感信息以及所述风速风向传感器测量的风速和风向信息调节所述电动转轴机构的转动角度、所述全动涵道机构的转速以及所述固定涵道机构的转速,以调整无人机的姿态及位置;根据所述风速风向传感器测量的风向信息和风速信息调节所述电动转轴机构的转动角度、所述全动涵道机构的转速以及所述固定涵道机构的转速,以使无人机实现对风阻力的抵抗。本发明通过调节全动涵道机构在水平方向的推力的大小和方向,抵消水平方向上的风阻;通过调节固定涵道机构在竖直方向的推力的大小和方向,抵消竖直方向上的风阻。相较于现有的无人机通过多旋翼结构同时抵消水平方向和竖直方向上的风阻,本技术的无人机通过全动涵道机构和固定涵道机构分别抵消水平方向和竖直方向上的风阻,能够快速调整无人机的姿态和位置,提高了无人机的抗风性能,在风力大时,不容易倾翻、发生坠机。
附图说明
36.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
37.图1为本发明实施例1提供的高抗风多涵道式系留无人机结构示意图;
38.图2为本发明实施例1提供的高抗风多涵道式系留无人机俯视图;
39.图3为本发明实施例1提供的高抗风多涵道式系留无人机侧视图;
40.图4为本发明实施例1提供的系留线缆控制装置示意图。
41.附图标记:1-系留线缆控制装置;2-全动涵道机构;3-定向信号接收天线;4-固定涵道机构;5-风速风向传感器;6-安装支架;7-电动转轴机构;8-系留线缆;9-无人机机体;10-天线基座;11-天线转轴;17-天线信号控制器;12-拉力传感器;13-转轴控制器;14-转轴电机;15-系留基座;16-绕线转轴。
具体实施方式
42.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
43.目前市面上行业级系留无人机多采用多旋翼布局,而旋翼桨叶因高速圆周运动使叶尖处速度最高,诱导阻力比较大,对外界气流产生冲击造成噪声大,造成旋翼动力效率较低。而采用涵道形式的系留无人机,由于叶尖处受涵道限制,冲击噪声减小。诱导阻力减少,而效率较高。在同样功率消耗下,涵道风扇较同样直径的孤立螺旋桨,会产生更大的推力、抗风能力强。此外由于涵道的环括作用,其结构更加紧凑、气动噪声低、使用安全性好。
44.本发明的目的是提供一种高抗风多涵道式系留无人机及其控制方法,以解决现有的系留无人机抗风能力差,风力大时,容易倾翻,发生坠机的问题。
45.为使本发明的上述目的、特征和优点能够更加明显易懂,下面结合附图和具体实
施方式对本发明作进一步详细的说明。
46.实施例1
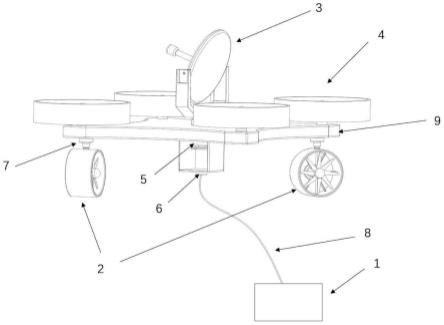
47.本实施例提供了一种高抗风多涵道式系留无人机。参见图1,所述无人机包括:飞行控制系统、系留线缆控制装置1、系留线缆8、机体9、固定涵道机构4、全动涵道机构2和电动转轴机构7。
48.所述固定涵道机构4,安装在所述机体9上方,用于对所述无人机进行姿态的调整以及竖直方向上位置的调整。其中,所述固定涵道机构4数量至少为四个,且四个所述固定涵道机构4呈矩形分布,安装在无人机机体9的四个方位角上,如图2所示,四个固定涵道分别为401、402、403和404。
49.所述电动转轴机构7安装在所述机体9的底部。
50.所述全动涵道机构2,与所述电动转轴机构7连接,能够绕所述电动转轴机构7旋转,用于提供水平方向的推力。在本实施例中,所述全动涵道机构2数量为2个,两个全动涵道旋转方向相反,以抵消涵道产生的反扭矩;2个全动涵道均可绕电动转轴机构360度旋转。
51.所述飞行控制系统包括处理器和设置于所述机体9上的惯性测量单元、位置传感器、速度传感器、高度传感器和风速风向传感器5;
52.所述处理器用于:根据所述惯性测量单元、所述位置传感器、所述高度传感器和所述速度传感器测量得到的传感信息以及所述风速风向传感器5测量的风速和风向信息调节所述电动转轴机构7的转动角度、所述全动涵道机构2的转速以及所述固定涵道机构4的转速,以调整无人机的姿态及位置;根据所述风速风向传感器5测量的风向信息和风速信息调节所述电动转轴机构7的转动角度、所述全动涵道机构2的转速以及所述固定涵道机构4的转速,以使无人机实现对风阻力的抵抗。
53.具体地:当无人机受到风的影响,无人机的预设姿态、预设位置、预设高度发生改变时,根据风速风向传感器5测量的风向信息和风速信息将风阻力分解为水平面风阻力和竖直面风阻力。无人机的设定姿态发生改变时,根据惯性测量单元测量得到的当前姿态计算得到姿态变化量,根据竖直面上的风阻力以及姿态变化量调节当前姿态对应的所述固定涵道机构4的转速,以改变垂直方向上的推力大小使无人机恢复至设定姿态。无人机的设定高度发生改变时,根据高度传感器测量的当前高度计算得到高度变化量,根据竖直面上的风阻力以及高度变化量调节所有所述固定涵道机构4的转速,以改变垂直方向上的推力大小使无人机恢复至设定高度。无人机设定位置发生改变时,根据位置传感器测量的当前位置计算得到位置变化量,调节所述电动转轴机构7的转动角度,使得所述全动涵道机构2产生的推力方向指向设定位置,根据位置变化量以及水平面上的风阻力方向调节所述全动涵道机构2的转速,使得所述全动涵道机构2产生的推力大小能够使无人机恢复至设定位置。通过所述固定涵道机构在垂直方向上的推力大小以及所述全动涵道机构2产生的推力方向和大小得到一个合力,能够使无人机恢复至设定状态。
54.当无人机恢复到设定位置时,当无人机恢复至设定状态后,根据风速风向传感器5测量的风向信息和风速信息将风阻力分解为水平面风阻力和竖直面风阻力,根据竖直面风阻力调节所述固定涵道机构4的转速,以产生竖直面上的推力;依据水平面上的风阻力方向调节电动转轴机构7的转动角度,使得所述全动涵道机构2产生的推力方向与水平风阻方向相反,以保持无人机位置稳定,调节所述全动涵道机构2的转速,以产生水平面上的推力。通
过竖直面上的推力和水平面上的推力得到一个合力,以使无人机实现对风阻力的抵抗。
55.其中,当无人机在水平面上受到风阻时,根据所述风速风向传感器5测量的风速信息调节所述全动涵道机构2转动速度,使得所述全动涵道机构2转动速度产生的水平方向上的推力能够抵抗风在水平风向上带给无人机的阻力;当无人机在竖直面上受到风阻时,无人机通过垂直方向的推力或重力抵消风阻,根据所述风速风向传感器5测量的风速信息调节所述固定涵道机构4的转速,使得固定涵道机构4的转动速度产生的竖直向上的推力能够抵抗风在竖直风向上带给无人机的阻力,提高了无人机的抗风性能。
56.本技术的无人机采用了全动涵道机构2,相比与市面上普遍采用机身倾斜,利用旋翼的水平分力抵抗水平方向的风阻并进行机身位置调节的多旋翼系留无人机来说,利用风速风向传感器进行流场感知,通过全动涵道机构2进行机身姿态和位置调节会更加迅速,其气动力响应时间也更少。
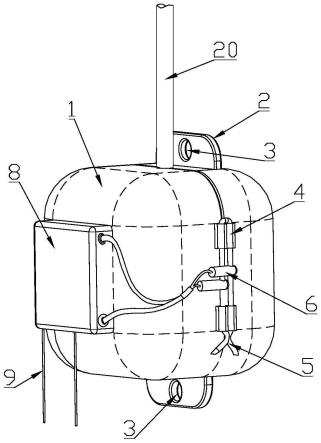
57.在本实施例中,如图3所示,所述无人机还包括:定向信号接收天线3、天线基座10、天线转轴11和天线信号控制器17。
58.所述定向信号接收天线3通过所述天线转轴11安装在所述天线基座10上,所述天线基座10底端和和天线信号控制器17安装在所述机体9上。
59.其中,定向信号接收天线3可绕天线转轴11完成两个自由度的周向转动,从而完成对不同信号的追踪转发。所述无人机优异的抗风性能和悬停性能保证定向信号接收天线3的工作稳定性,避免出现信号接收中断或丢失现象。
60.所述系留线缆控制装置1包括系留基座15、转轴电机14、转轴控制器13、拉力传感器12和绕线转轴16,其中所述系留线缆控制装置结构如图4所示。
61.所述系留线缆8的一端缠绕在所述绕线转轴16上;所述绕线转轴16的一端与所述转轴电机14的输出轴连接,所述绕线转轴16的另一端安装有所述拉力传感器12;所述拉力传感器12的输出信号端与所述转轴控制器13连接。
62.其中,所述系留线缆8用于为系留无人机供电、传输控制信号和业务数据。系留线缆控制装置1可根据拉力传感器12的变化,调整转轴电机14的输出扭矩,通过绕线转轴16的正反转控制系留线缆8的收放,以调节系留线缆8拉力的大小。
63.本实施中的所述无人机还包括:安装支架6;所述安装支架6安装在所述机体9底部,用于对所述系留线缆8进行固定。具体地,安装支架6的底端通过万向节与系留线缆8的上端连接。另外,风速风向传感器5通过安装支架6安装在机体9的底部。
64.本实施所述高抗风多涵道式系留无人机的控制方法,包括:
65.通过风速风向传感器5测量当前风速信息和当前风向信息;
66.通过位置传感器测量无人机当前水平位置信息;
67.根据预设水平位置和所述当前水平位置信息得到水平位置变化信息;
68.调节电动转轴机构7的转动角度,以使全动涵道机构2提供的推力方向指向预设水平位置;根据所述水平位置变化信息以及所述风速风向传感器5测量的当前风速信息调节所述全动涵道机构2转动速度,以使无人机在水平风向上提供推力使无人机恢复至预设水平位置;
69.当无人机恢复至预设水平位置后,根据风速风向传感器5测量的当前风向信息调节电动转轴机构7的转动角度,以使全动涵道机构2提供的推力方向与水平面风阻力方向相
反,根据风速风向传感器5测量的当前风速信息调节所述全动涵道机构转动速度,以使无人机在水平风向上抵抗风速。
70.例如,当系留无人机出现水平位置偏移时,飞行控制系统监测到位置传感器测量的无人机水平位置变化(无人机当前水平位置与预设水平位置的距离)大于系统阀值的绝对值时,飞行控制系统利用gps提供方位坐标信息计算出无人机距离预设水平位置的距离sh和偏角qh,飞行控制系统输出调整全动涵道机构2和电动转轴机构7的指令,使全动涵道推力方向调整到与偏角qh一致(与水平上的风向相反),同时飞行控制系统输出增大2全动涵道机构转速的指令。全动涵道机构2的驱动电机接收到飞行控制系统的指令后,全动涵道机构2转速开始变化。随着距离sh的绝对值不断减小,全动涵道机构2转速变化率也逐渐减小,当距离sh的绝对值小于系统阀值时,全动涵道机构2转速不再变化,无人机的水平位置恢复正常。
71.无人机的机身姿态稳定性包括:俯仰稳定性、滚转稳定性和航向稳定性。因此需要在俯仰姿态、滚转姿态和航向姿态三方面对机身姿态稳定性进行控制,具体包括:
72.(1)通过惯性测量单元测量无人机机体的当前俯仰姿态;
73.根据预设俯仰姿态以及所述惯性测量单元测量的俯仰姿态,对俯仰姿态对应的固定涵道机构的转动速度进行控制,以调整无人机的俯仰姿态。
74.例如,当系留无人机出现俯仰姿态问题时,飞行控制系统监测到惯性测量单元所测量的无人机机身俯仰姿态角qf的绝对值大于系统阀值时,若qf大于零,飞行控制系统认为此时无人机状态为前高后低(若qf小于零,飞行控制系统则认为此时无人机状态为前低后高),飞行控制系统依据机身俯仰姿态角qf来输出减小401和403固定涵道机构转速以及增大402和404固定涵道机构转速的指令,固定涵道机构的驱动电机接收到飞行控制系统的指令后,固定涵道机构转速开始变化。随着仰姿态角qf的绝对值不断减小,固定涵道机构转速变化率也逐渐减小,当仰姿态角qf的绝对值小于系统阀值时,固定涵道机构转速不再变化,无人机的俯仰姿态恢复正常。
75.(2)通过所述惯性测量单元测量无人机机体的当前滚转姿态;
76.根据预设滚转姿态以及所述惯性测量单元测量的滚转姿态,对滚转姿态对应的固定涵道机构的转动速度进行控制,以调整无人机的滚转姿态。
77.例如,当系留无人机出现滚转姿态问题时,飞行控制系统监测到惯性测量单元所测量的无人机机身滚转姿态角qg的绝对值大于系统阀值时,若qg大于零,飞行控制系统认为此时无人机状态为左高右低(若qg小于零,飞行控制系统则认为此时无人机状态为左低右高),飞行控制系统依据机身滚转姿态角qg来输出减小401和402固定涵道机构转速以及增大403和404固定涵道机构转速的指令。固定涵道机构的驱动电机接收到飞行控制系统的指令后,固定涵道机构转速开始变化。随着滚转姿态角qg的绝对值不断减小,固定涵道机构转速变化率也逐渐减小,当滚转姿态角qg的绝对值小于系统阀值时,固定涵道机构转速不再变化,无人机的滚转姿态恢复正常。
78.(3)通过所述惯性测量单元测量无人机机体的当前航向姿态;
79.根据预设航向姿态以及所述惯性测量单元测量的当前航向姿态,对航向姿态对应的固定涵道机构的转动速度进行控制,以调整无人机的航向姿态。
80.例如,当系留无人机出现航向姿态问题时,飞行控制系统监测到惯性测量单元所
测量的无人机机身航向姿态角qh的绝对值大于系统阀值时,若qh大于零,飞行控制系统认为此时无人机航向状态为左偏(若qh小于零,飞行控制系统认为此时无人机航向状态为右偏),飞行控制系统依据机身航向姿态角qh来输出减小402和403固定涵道机构转速以及增大401和404固定涵道机构转速的指令,固定涵道机构的驱动电机接收到飞行控制系统的指令后,固定涵道机构转速开始变化。在固定涵道机构电机反扭距的作用下,航向姿态角qh的绝对值不断减小,固定涵道机构转速变化率也逐渐减小,滚转姿态角qh的绝对值,当滚转姿态角qh的绝对值小于系统阀值时,固定涵道机构转速不在变化,无人机的航向姿态恢复正常。
81.所述控制方法还包括:
82.通过高度传感器测量无人机当前高度信息;
83.根据预设高度信息以及所述高度传感器测量的当前高度信息,对所有固定涵道机构的转动速度进行控制,以使无人机的高度恢复至预设高度。具体过程如下:
84.当系留无人机垂直方向的风阻发生变化,导致无人机机体高度变化大于系统阀值时,飞行控制系统将高度传感器测量的当前飞行高度hn与预设高度信息hd相减得到当前高度误差hr。若高度误差hr大于零,飞行控制系统认为此时无人机状态为高度偏高(若hr小于零,飞行控制系统则认为此时无人机状态为高度偏低)。飞行控制系依据当前高度误差hr,输出减小所有固定涵道机构转速的指令,固定涵道机构的驱动电机接收到飞行控制系统的指令后,驱动固定涵道机构转速减。随着高度误差hr不断减小,固定涵道机构转速变化率也逐渐减小,当高度误差hr小于阀值hh时,固定涵道机构转速不再变化,无人机恢复到预设高度。
85.本实施例的系留线缆控制办法包括:
86.飞行控制系统将预设飞行高度hd对应系留线缆8所受拉力阀值信息fh传入转轴控制器13中,且由拉力传感器12监测系留线缆8所受拉力。当外界风速导致无人机飞行高度上升(下降),此时转轴控制器13会检测到拉力传感器12测量的系留线缆8所受拉力大于(小于)阀值fh,转轴控制器会向转轴电机14输出减小(增大)电机扭矩的指令,转轴电机接收指令后,转轴电机14减小(增大)输出扭矩;绕线转轴16放线(收线);当转轴控制器13监测到系留线缆8所受拉力恢复到阀值范围内,转轴控制器13向转轴电机14输出停止工作的指令,此时绕线转轴16停止放线(收线)。
87.定向天线信号方位稳定性的控制办法
88.天线信号控制器17实时测量天线信号质量,将测量得到的天线信号质量数据与设定的天线信号质量阈值进行对比,并将测量得到的传感信息发送给飞行控制系统,若低于系统阈值,飞行控制系统通过天线转轴进行周向调整,使得天线信号质量数据恢复到设定的天线信号质量范围区间内。
89.无人机因采用更大推力的固定涵道机构4和使机身位置及姿态调节更为迅速的全动涵道机构2,因此具备较高的抗风性能,且能保证机身姿态调整时,其定向信号接收天线3不会发生大幅度方位偏离。因此具备对特定方向信号进行持续追踪,此外定向天线的信号追踪能力远高于同等功率下的全向信号接收天线,以及本无人机采用系留线缆进行无人机供电,因此可作为长时间滞空的信号转接站(例如在大型无人机远离地面站的巡航路线上,进行信号转接)。
90.本文中应用了具体个例对本发明的原理及实施方式进行了阐述,以上实施例的说明只是用于帮助理解本发明的方法及其核心思想;同时,对于本领域的一般技术人员,依据本发明的思想,在具体实施方式及应用范围上均会有改变之处。综上所述,本说明书内容不应理解为对本发明的限制。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。