一种基于p-u曲线插值变论域模糊控制的光伏有功上调方法
技术领域
1.本发明涉及光伏发电技术领域,具体的是一种基于p-u曲线插值变论域模糊控制的光伏有功上调方法。
背景技术:
2.截止到2021年底,我国光伏累计装机容量达到了3.06亿千瓦,占全国总发电装机容量的12.9%。由于光伏能源本身的间歇性和波动性,光伏最大功率点跟踪虽然能确保光伏资源的最大化利用,但是极易造成有光满发和无光不发的不良现象,这极易对电网的稳定性造成影响。随着光伏渗透率的持续增加,电力系统对光伏除了提供电能的常规要求外,还需要其提供一些辅助功能,包括频率响应在内。
3.光伏参与电网调频主要有两种方式,一种是在光伏侧增加储能,但是储能装置的的成本较高。另一种方法是使光伏发电单元工作在电网调度模式,其输出功率持续跟踪系统的有功功率指令。本发明针对电力系统频率低于额定频率时需要提高有功功率输出的要求,提出了一种光伏有功快速上调方法。针对现有技术存在的功率跟踪速度较慢的问题,提出了一种基于p-u曲线插值的变论域模糊控制方法,能实现对指定有功上调指令的快速精准跟踪。
技术实现要素:
4.为解决上述背景技术中提到的不足,本发明的目的在于提供一种基于p-u曲线插值变论域模糊控制的光伏有功上调方法。
5.本发明的目的可以通过以下技术方案实现:
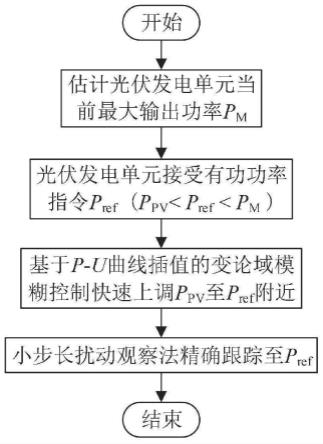
6.一种基于p-u曲线插值变论域模糊控制的光伏有功上调方法,其特征在于,所述方法包括如下步骤:
7.步骤1:估计光伏发电单元当前可发最大输出功率,然后光伏阵列接收有功上调指令;
8.步骤2:通过基于p-u曲线插值的变论域模糊控制快速上调光伏发电单元的当前工作点至有功上调指令附近;
9.步骤3:在有功指令附近通过小步长的扰动观察法精确平稳跟踪至有功上调指令。
10.进一步的,所述步骤1中通过设置主逆变器,使其一直工作在最大功率点跟踪模式的方式,获取当前光伏发电单元可发最大功率pm。
11.进一步的,所述步骤1中有功上调指令与最大功率点之间应满足以下关系来进行光伏有功快速上调,
12.p
pv
<p
ref
<pm13.其中,p
pv
为光伏发电单元当前实际工作点的功率,p
ref
为有功上调指令,pm为光伏发电单元最大输出功率。
14.进一步的,所述步骤2中基于扰动电压步长模糊控制提出了一种光伏有功快速上
调方法,记k-1步的电压变化量和k-1步的功率变化量分别为:
15.δu
k-1
=u
k-1-u
k-2
,δp
k-1
=p
k-1-p
ref
16.其中,δu
k-1
为第k-1步的电压变化量,u
k-1
为第k-1步的电压,u
k-2
为第k-2步的电压,δp
k-1
为第k-1步的功率变化量,p
k-1
为第k-1步的功率,p
ref
为有功上调指令。
17.进一步的,所述δu
k-1
和δp
k-1
作为模糊控制器的输入被模糊化后,根据设计的模糊规则得到模糊输出量再经过解模糊可以得到第k步的电压扰动量δuk。
18.进一步的,所述模糊规则的设计为:第一,对电压的调整方向,即δuk的正负,当增大电压导致p
pv
靠近p
ref
时或者当电压减小导致p
pv
远离p
ref
时,应提高电压,即δuk》0;当电压减小导致p
pv
靠近p
ref
时或者电压增大导致p
pv
远离p
ref
时,应减小电压,即δuk《0。第二,对电压的调整幅度,即|δuk|的大小,当|δp
k-1
/δu
k-1
|较大时,当前工作点距离有功上调指令对应的目标点仍较远,此时应设置较大的扰动电压步长|δuk|和较大的扰动电压论域;当|δp
k-1
/δu
k-1
|较小时,当前工作点距离有功上调指令对应的目标点已较近,此时应设置较小的扰动电压步长|δuk|,其扰动电压论域也应设置得较小。
19.进一步的,所述δu
k-1
与δuk的论域收缩方法,在p-u曲线上进行直线插值实现变论域:
[0020][0021]
其中,uk为第k步的电压,u
k-1
为第k-1步的电压,u
k-2
为第k-2步的电压,p
k-1
为第k-1步的功率,p
k-2
为第k-2步的功率,p
ref
为有功上调指令。
[0022]
进一步的,所述变论域的具体方法为:
[0023]
s1、第一步控制,以p-u曲线上已知点(um,pm)与(u0,p0)为基点作直线,与水平线p=p
ref
所得交点横坐标为u1,第一步的δuk论域区间长度为|u
0-u1|;
[0024]
s2、第k步控制(k》1,k∈n),以p-u曲线上已知点(u
k-1
,p
k-1
)与(u
k-2
,p
k-2
)为基点作直线,与水平线p=p
ref
所得交点横坐标为uk,第k步的δuk论域区间长度为|u
k-1-uk|。
[0025]
进一步的,所述步骤3中从变论域模糊控制切换到小步长扰动观察法跟踪至上调功率指令的条件为下式被满足:
[0026]
|δp
k-1
/δu
k-1
|<γ
[0027]
其中,δp
k-1
为第k-1步的功率变化量,δu
k-1
为第k-1步的电压变化量,γ为变化量阈值,若该式成立,则当前工作点已经跟踪到有功上调指令对应的目标点附近。
[0028]
本发明的有益效果:
[0029]
与现有技术相比,本发明提出了一种基于p-u曲线插值变论域模糊控制的光伏有功上调方法,可有效提高光伏发电单元跟踪有功上调指令的速度和精度。具体表现为:通过在p-u曲线上进行直线插值对扰动电压论域实现自适应修改,避免传统论域固定的模糊控制在跟踪后期电压步长生成不准确易导致功率跟踪不准确的问题,并在实际工作点跟踪到p
ref
附近后切换至小步长扰动观察法实现对p
ref
的平稳精确跟踪。
附图说明
[0030]
下面结合附图对本发明作进一步的说明。
[0031]
图1为本发明所述一种基于p-u曲线插值变论域模糊控制的光伏有功上调方法的
具体流程图;
[0032]
图2为本发明实施例在p-u曲线上进行直线插值实现变论域的示意图;
[0033]
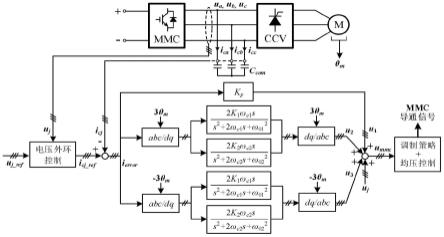
图3为本发明实施例基于p-u曲线插值的变论域模糊控制实现光伏有功快速上调的结构图;
[0034]
图4为本发明实施例的仿真拓扑结构图;
[0035]
图5为本发明实施例设置的功率跟踪目标曲线;
[0036]
图6为本发明实施例的输出功率曲线图。
具体实施方式
[0037]
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其它实施例,都属于本发明保护的范围。
[0038]
本实施例的光伏阵列由两块光伏组件并联组成,单个光伏组件的参数如表1所示。采用boost变换器实现功率控制,该boost变换器包括输入电容、电感、开关管、二极管、输出电容和负载,其具体参数如表2所示。
[0039]
表1单个光伏组件的参数
[0040][0041]
表2 boost变换器参数
[0042][0043]
如图1-图4所示,一种基于p-u曲线插值变论域模糊控制的光伏有功上调方法,其特征在于,所述方法包括如下步骤:
[0044]
步骤1:估计光伏发电单元当前可发最大输出功率,然后光伏阵列接收有功上调指令;
[0045]
步骤2:通过基于p-u曲线插值的变论域模糊控制快速上调光伏发电单元的当前工作点至有功上调指令附近;
[0046]
步骤3:在有功指令附近通过小步长的扰动观察法精确平稳跟踪至有功上调指令。
[0047]
进一步的,所述步骤1中通过设置主逆变器,使其一直工作在最大功率点跟踪模式的方式,获取当前光伏发电单元可发最大功率pm。
[0048]
进一步的,所述步骤1中有功上调指令与最大功率点之间应满足以下关系来进行光伏有功快速上调,
[0049]
p
pv
<p
ref
<pm[0050]
其中,p
pv
为光伏发电单元当前实际工作点的功率,p
ref
为有功上调指令,pm为光伏发电单元最大输出功率。
[0051]
进一步的,所述步骤2中基于扰动电压步长模糊控制提出了一种光伏有功快速上调方法,记k-1步的电压变化量和k-1步的功率变化量分别为:
[0052]
δu
k-1
=u
k-1-u
k-2
,δp
k-1
=p
k-1-p
ref
[0053]
其中,δu
k-1
为第k-1步的电压变化量,u
k-1
为第k-1步的电压,u
k-2
为第k-2步的电压,δp
k-1
为第k-1步的功率变化量,p
k-1
为第k-1步的功率,p
ref
为有功上调指令。
[0054]
进一步的,所述δu
k-1
和δp
k-1
作为模糊控制器的输入被模糊化后,根据设计的模糊规则得到模糊输出量再经过解模糊可以得到第k步的电压扰动量δuk。
[0055]
进一步的,所述模糊规则的设计为:第一,对电压的调整方向,即δuk的正负,当增大电压导致p
pv
靠近p
ref
时或者当电压减小导致p
pv
远离p
ref
时,应提高电压,即δuk》0;当电压减小导致p
pv
靠近p
ref
时或者电压增大导致p
pv
远离p
ref
时,应减小电压,即δuk《0。第二,对电压的调整幅度,即|δuk|的大小,当|δp
k-1
/δu
k-1
|较大时,当前工作点距离有功上调指令对应的目标点仍较远,此时应设置较大的扰动电压步长|δuk|和较大的扰动电压论域;当|δp
k-1
/δu
k-1
|较小时,当前工作点距离有功上调指令对应的目标点已较近,此时应设置较小的扰动电压步长|δuk|,其扰动电压论域也应设置得较小。
[0056]
进一步的,所述δu
k-1
与δuk的论域收缩方法,在p-u曲线上进行直线插值实现变论域:
[0057][0058]
其中,uk为第k步的电压,u
k-1
为第k-1步的电压,u
k-2
为第k-2步的电压,p
k-1
为第k-1步的功率,p
k-2
为第k-2步的功率,p
ref
为有功上调指令。
[0059]
进一步的,所述变论域的具体方法为:
[0060]
s1、第一步控制,以p-u曲线上已知点(um,pm)与(u0,p0)为基点作直线,与水平线p=p
ref
所得交点横坐标为u1,第一步的δuk论域区间长度为|u
0-u1|;
[0061]
s2、第k步控制(k》1,k∈n),以p-u曲线上已知点(u
k-1
,p
k-1
)与(u
k-2
,p
k-2
)为基点作直线,与水平线p=p
ref
所得交点横坐标为uk,第k步的δuk论域区间长度为|u
k-1-uk|。
[0062]
进一步的,所述步骤3中从变论域模糊控制切换到小步长扰动观察法跟踪至上调功率指令的条件为下式被满足:
[0063]
|δp
k-1
/δu
k-1
|<γ
[0064]
其中,δp
k-1
为第k-1步的功率变化量,δu
k-1
为第k-1步的电压变化量,γ为变化量阈值,若该式成立,则当前工作点已经跟踪到有功上调指令对应的目标点附近。
[0065]
如图5所示的功率跟踪目标曲线,0-0.5s时,光伏阵列输出功率保持为450w,0.5s
时接收到功率上调指令,功率要求上调到480w。
[0066]
如图6所示的基于p-u曲线插值变论域的光伏有功快速上调方法和传统的扰动观察法跟踪有功上调指令的输出比较曲线。本发明提出的方法与扰动观察法相比能较快地跟踪到有功上调指令。
[0067]
综上所述,本发明提出的一种基于p-u曲线插值变论域模糊控制的光伏有功上调方法,可有效提高光伏发电单元跟踪有功上调指令的速度和精度。通过在p-u曲线上进行直线插值对扰动电压论域实现自适应修改,避免传统论域固定的模糊控制在跟踪后期电压步长生成不准确易导致功率跟踪不准确的问题,并在实际工作点跟踪到p
ref
附近后切换至小步长扰动观察法实现对p
ref
的平稳精确跟踪。
[0068]
以上显示和描述了本发明的基本原理、主要特征和本发明的优点。本行业的技术人员应该了解,本发明不受上述实施例的限制,上述实施例和说明书中描述的只是说明本发明的原理,在不脱离本发明精神和范围的前提下,本发明还会有各种变化和改进,这些变化和改进都落入要求保护的本发明范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。