1.本发明属于机器人技术领域,特别市一种能够实现切菜的全自动餐饮机器人。
背景技术:
2.新冠肺炎疫情的发展使得餐饮业需要实现无接触的操作,从切菜、翻炒、下料、出锅、洗锅一系列烹饪环节都需要减少人为接触。除此之外烹饪对于从业人员的技术和行业经验要求极高。
3.目前市面上也出现了一些烹饪设备,但是都是只能实现翻炒、加热以及调料的添加,对于烹饪的切菜环节并不能很好的实现;另外对于一些功能较全的烹饪机器人机械结构较为复杂。
技术实现要素:
4.本发明针对现有技术的不足,提供了一种实现切菜的全自动烹饪机器人,该种自动烹饪机器人能够实现前期对蔬菜进行切割并且完成送菜、翻炒、下料、出锅、洗锅操作。
5.为了实现上述目的,本发明通过一下技术方案得以解决:一种实现切菜的全自动烹饪机器人,所述全自动烹饪机器人包括电磁加热模块、炒锅模块、送菜模块、下料模块、切菜模块、洗锅模块、锅盖翻转模块;所述电磁加热模块用于对锅具进行加热,分为侧面加热线盘和底部加热线盘,侧面加热线盘用来实现翻炒时的加热,底部加热线盘用来实现焖煮时的加热;所述炒锅模块用于实现锅具的旋转翻炒和倾倒;所述送菜模块用于接住切菜模块出来的蔬菜,通过电动推杆将菜盒升高至电磁吸铁处,电磁吸铁吸附料盒通过电机将蔬菜送入锅具中;所述下料模块中有用于液体调料、颗粒状调料以及粘稠状调料下料的机械结构,用于翻炒过程中各种调料的添加;所述切菜模块用于对蔬菜进行识别分类并将其送入不同的切菜刀口中进行切菜;所述洗锅模块通过水泵向锅中注入大量清水并配合锅具的旋转来完成锅具的清洗;所述锅盖翻转模块通过电机控制锅盖的翻转来实现焖煮时盖盖的需要。
6.上述方案中,优选的,下料模块中液体调料、颗粒状调料、粘稠状调料的机械结构以及洗锅模块都在同一个移动平台上呈现一排分布;所述移动平台通过皮带传动,电机提供动力完成下料模块的整体移动。
7.上述方案中,优选的,送菜模块中包括用于移动的平台,所述移动平台上有用于盛菜的菜盒,下方有用于提升的电动推杆;所述电磁吸铁用于吸附菜盒,来保证菜盒的翻转,电磁吸铁通过连接件固定在旋转轴上;所述旋转轴通过联轴器与电机连接。
8.上述方案中,优选的,所述切菜模块通过摄像头拍照并图像识别对蔬菜进行分类,不同种类的蔬菜通过平台输送到对应刀口处并将其倒入;所述平台通过皮带传动实现运动,平台上有盛菜盒用于盛放蔬菜,盛菜盒通过舵机实现翻转;所述切菜机有两种不同的刀口分别用来切割图像分类完的蔬菜,一种刀口切割茎叶类蔬菜,一种刀口切割根茎类蔬菜。
9.上述方案中,优选的,所示锅盖翻转模块包括旋转轴、锅盖连接件、锅盖、法兰、联
轴器和电机;所述法兰用于连接连接件和旋转轴;所述锅盖连接件用于连接锅盖;所述联轴器用于连接旋转轴和电机。
10.本发明与现有技术相比,具有一下有益效果:该种全自动烹饪机器人采用两个电磁加热模块,能够实现焖煮时底部的加热和翻炒时侧面的加热;翻炒模块中使用旋转锅具的方式进行翻炒,侧面的蜗轮蜗杆能够在完成翻炒后将锅具旋转使菜肴出锅,使机械结构变的简单;该机器人的下料模块包含了液体调料、颗粒状调料、粘稠状调料,种类丰富能够满足中式菜肴的调料需求;该机器人只需要将蔬菜放入切菜模块的盛菜盒中,摄像头会对蔬菜的图像进行采集并实现分类将其倒入不同的切菜机中进行切菜,省去了前期菜切的繁琐环节。
附图说明
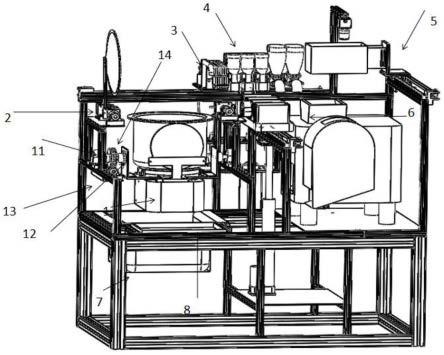
11.图1为本发明实施例中全自动烹饪机器人的结构示意图。
12.图2为本发明实施例中翻炒模块的剖视结构示意图。
13.图3为本发明实施例中送菜模块的结构示意图。
14.图4为本发明实施例中下料模块的结构示意图。
15.图5为本发明实施例中下料模块中粘稠状调料下料结构的剖视图。
16.图6为本发明实施例中下料模块中颗粒调料下料结构的分解示意图。
17.图7为本发明实施例中切菜模块的结构示意图。
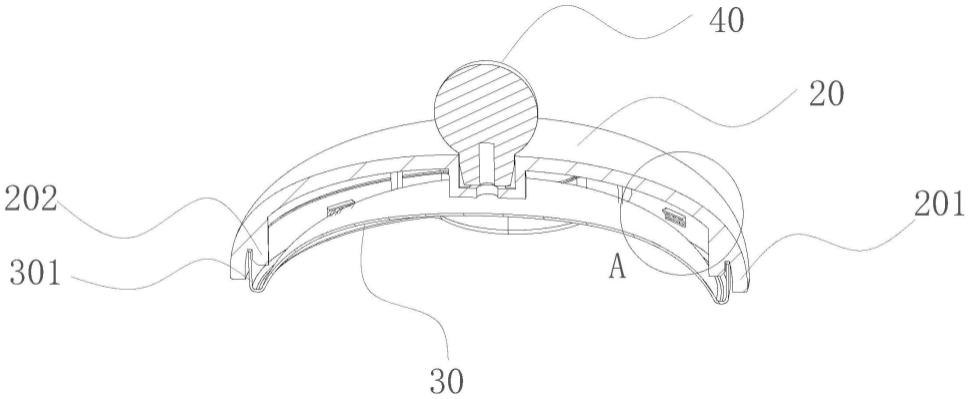
18.图8为本发明实施例中锅盖翻转模块的结构示意图
19.图中:1为翻炒模快、2为锅盖翻转模块、3为清洗模块、4为下料模块、5为切菜模块、6送菜模块、7为水槽、8为餐盘、11为第一带座轴承、12为第一法兰、13为第一支撑板、14为蜗轮蜗杆、111为锅具、112为第一加热线盘、113为线盘连接件、114为外壳、115为第一驱动电机、116为电机支撑板、117为第一带轮、118为第一皮带、119为第二带轮、120为第一轴承、121为主轴、122为锅具支撑板、123为第二法兰、124第二线盘、125为锅具连接件、611为第一电机架、612为光轴固定架、613为第二带座轴承、614为电动推杆、615为第一直线导轨、616为滑块、617为料盒托盘、618为料盒、619为铁片、620为电磁吸铁、621为电磁吸铁固定件、622为第一旋转轴、623为第一联轴器、624为第二电机架、625为第二驱动电机、626为第二皮带、627为第三驱动电机、411为软管、412软管固定架、413为第一舵机、414为管头、415为第一蠕动泵、416为储料瓶、417为第三皮带、418为第四驱动电机、419为第三带轮、420为第三电机架、421为料管支座、422为料管、423为第五驱动电机、424为粘稠状调料储料仓、425为粘稠状调料储料仓盖、426为颗粒状调料储料仓、427为颗粒状调料储料仓盖、429为第二联轴器、430为第二轴承、431为螺杆、432为振动电机、433为料口挡板、511为菜盒、512为茎叶类蔬菜切菜刀口、513为根茎类蔬菜切菜刀口、514为第四皮带、515为第六驱动电机、516为第四电机架、517为平台连接件、518为第二舵机、519为菜盒连接件、520为图像采集摄像头、211为锅盖、212为第七驱动电机、213为第二支撑板、214为第三联轴器、215为第二旋转轴、216为第三带座轴承、217为第三法兰、218为锅盖连接件一、219为锅盖连接件二。
具体实施方式
20.以下结合具体实施例及附图对本发明进行详细说明。
21.首先请参见图一,本发明实施例提供了一种实现切菜的全自动烹饪机器人,其可包括但不局限于:翻炒模快1、锅盖翻转模块2、清洗模块3、下料模块4、切菜模块5、送菜模块6、水槽7、餐盘8。该种全自动烹饪机器人的工作流程如下:1、将洗好的蔬菜放到菜盒上,随后用于图像采集的摄像头采集蔬菜图像经过图像检测分为茎叶类和根茎类,再由第六驱动电机通过第四皮带传动将菜盒蔬菜到茎叶类蔬菜切菜刀口或者根茎类切菜刀口;2、第三驱动电机带动第二皮带进行传动将料盒托盘移动到切菜机的出菜口处来盛接切好的菜,随后归位,由电动推杆将第一直线导轨推升到电动推杆的最大量程处,第三驱动电机再次通过皮带传动移动料盒托盘将料盒上的铁片对准电磁吸铁,随后电磁吸铁通电将料盒吸附,通过第二驱动电机带动电磁吸铁翻转从而带动料盒将菜倒入锅中;3、下料模块的第一蠕动泵可以从储料瓶中抽出调料通过软管倒入锅中,颗粒状调料通过第一舵机打开料口挡板在振动电机的振动下来加入颗粒状调料,粘稠状调料由第五驱动电机带动螺杆将酱料挤出到锅中,第四驱动电机通过第三皮带传动来移动整个下料模块来调整下料的位置;4、翻炒模块通过蜗轮蜗杆传动将锅具倾斜60
°
,第一驱动电机通过第一皮带带动主轴旋转,从而带动锅具旋转进行翻炒,翻炒结束后倾斜120
°
将菜倒入餐盘;5、加热模块的工作根据炒菜的种类来确定,进行炒菜时使用第一加热线盘进行加热,进行焖煮操作时使用第二加热线盘进行加热;6、焖煮时第七驱动电机带动锅盖的开合来实现焖煮的效果;7、清洗模块进行清洗时由蠕动泵进行注水,配合锅具的旋转进行清洗,最后通过蜗轮蜗杆反向旋转120
°
将水倒入水槽。
22.该种装置有茎叶类和根茎类俩种切菜口可实现不同软硬程度蔬菜的切割,通过图象检测可自动识别分类,省去手动切菜的环节;在翻炒模块中使用蜗轮蜗杆传动既能增大传动比又能实现不同角度的翻转,使结构更加简单;下料模块中的液体调料、颗粒状调料、粘稠状调料能够满足中式餐饮的调料使用;折整个装置通过程序控制能够保证炒出的菜品一致。
23.所述翻炒模快1中锅具连接件125将锅具111和第二法兰123连接到一起,主轴121由第一轴承120固定位置下方连接第二轮119,第一驱动电机115安装在电机支撑板上电机轴上安装第一带轮117,通过第一皮带118来带动主轴121旋转,主轴121由法兰夹紧从而可以带动锅具111旋转,第一加热线盘112位于锅具111的侧面由线盘连接件113固定,第二加热线盘124位置锅具的下方,114为外壳,锅具支撑板122与第一法兰12连接,通过一根轴固定在11第一带座轴承上,蜗轮蜗杆14安装在第一支撑板13上用来带动整个翻炒模快的旋转;采用该结构可实现锅具的拆卸,在倒菜、倒水时仅通过蜗轮蜗杆就能实现,结构上有两个加热线盘,能够针对不同翻炒模式进行加热,节省功率。
24.所述的送菜模块6中的料盒618上安装上铁片619用来被电磁吸铁620吸附,在料盒托盘617上有四个和料盒618一样的料盒能够满足多种蔬菜的盛放,整个料盒托盘617固定在滑块616上,滑块616能够在第一直线导轨615上滑动,滑块的移动由第三驱动电机627通过第二皮带626来移动,在装好切菜机切好的菜后由电动推杆614推升至电磁吸铁620的位置,电磁吸铁620通过电磁吸铁固定件621连接在光轴固定架612上,光轴固定架612夹紧第一旋转轴622,第一联轴器623将第二驱动电机625与第一旋转轴622连接在一起,第二驱动电机625通过第二电机架624安装在铝型材上,在送菜时将电磁吸铁620通电吸附铁片619来带动料盒618翻转,下一个料盒通过移动滑块继续到达电磁吸铁620处重复上述动作;该结
构通过电动推杆来使导轨上升和下降减少装置的体积。
25.所述的下料模块中主要包括了液体料、颗粒状调料以及粘稠状调料的下料结构,该部分安装在如同上述第一直线导轨615和滑块616上能够在第四驱动电机418在第三皮带417传动下进行移动。
26.液体调料下料结构由第一蠕动泵熊储料瓶416抽取调料从软管411中流出,软管通过软管固定架412来固定位置,整个液体下料结构有五个上述部分,但不局限于五个。
27.颗粒状调料下料装置主要有颗粒状调料储料仓426上面有颗粒状调料储料仓盖427保证不与空气接触,整个颗粒状调料储料仓426呈现一定的角度保证下料的流畅性,下方的出料口为圆形漏孔,为了放置调料自然留下有料口挡板433通过第一舵机413来控制开合,为了保证下料的速度和质料在侧面安装有振动电机432,配合料口挡板433的开合就能保证下料量;上述颗粒状下料结构有三个但不局限于三个。
28.粘稠装调料下料装置采用螺杆挤出的方式,酱料储存在粘稠状调料储料仓424中上方有425为粘稠状调料储料仓盖避免与空气接触,在料管422料管支座421连接其中有螺杆431通过料管支座422中的第二轴承430支撑,螺杆431一端通过第二联轴器429与第五驱动电机423连接,管头414与料管422连接用来改变下料方向;上述粘稠状下料结构有两个但不局限于两个。
29.切菜模块5中安装了如同上述第一直线导轨615和滑块616上能够在第六驱动电机515在第四皮带514传动下进行移动。菜盒511通过菜盒连接件519与平台连接件517连接安装在滑块上,第二舵机518安装在菜盒连接件519上与菜盒511连接,菜盒511上方安装图像采集摄像头520用来采集菜盒中的蔬菜图像进而进行检测分类,切菜机中有两个切菜的刀口分别是茎叶类蔬菜切菜刀口512和根茎类蔬菜切菜刀口513,该结构能够实现不同种类蔬菜的切割,既能够实现切菜,又能够实现不同硬度的蔬菜对应不同的切割方式。
30.锅盖翻转模块2中的锅盖211通过锅盖连接件二219与锅盖连接件一218连接,锅盖连接件一218的侧面与第三法兰217连接,第二旋转轴215夹在第三法兰217中由第三联轴器214与第七驱动电机212连接,由第七驱动电机212来控制锅盖的旋转,该结构简单便于控制。
31.由上可知,本实施例的烹饪机器人可以实现茎叶类和根茎类两种蔬菜的切割,自动送菜,自动下料,翻炒出菜和清洗一体,自动化程度高,能够实现中式菜肴的烹饪。
32.以上所述是本发明的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离发明原理的前提下,还可以做出若干改进和替换,这些改进也视为本发明的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。