1.本发明涉及板材加工技术领域,具体涉及一种堆叠板材密度识别方法及其装置、系统。
背景技术:
2.在板材自动化净化过程中,需要对依次板材运输至高温除醛仓、加湿仓、喷如药剂仓进行处理,高温除醛仓需要对板材进行加热加速甲醛释放,加湿仓用于板材高温后的湿度控制,喷涂药剂仓用于对板材表面喷涂具有除醛或净味等功能作用的药剂,针对需要板材自动化净化过程,需要获取待净化板材的初始状态数据,主要包括:材质、密度、厚度、长宽、含水率以及初始环保等级(初始甲醛释放量),根据获取的初始状态数据确定与温度参数、加湿参数等参数有关的初始净化模式,实现板材的全自动化净化。然而在放置过程中,往往板材堆叠块与中心轴线并不能很好的重合,使得板材堆叠块摆放时的中线轴线无法与备料平台的中心轴线对齐,使得在进行长宽计算的过程中存在误差,且在拍摄过程中由于拍摄角度而导致拍摄后的图像倾斜或者变形的测量图像,将会大大降低单板厚度识别的准确性,从而造成单板密度计算的误差。
技术实现要素:
3.本发明的目的在于提供一种堆叠板材密度识别方法及其装置、系统,设置厚度检测组件、重量检测组件、长宽检测组件,通过长宽检测组件中设置的多组距离传感器减少长宽边距计算的误差,以及厚度检测组件中利用透视变换方法减少单板厚度计算的误差,用以解决现有的板材的全自动化净化过程中密度参数计算误差大的问题。
4.一种堆叠板材密度识别系统,包括用于放置堆叠板材的备料平台以及厚度检测组件、重量检测组件、长宽检测组件,其中:
5.所述厚度检测组件包括设置在备料平台上方的距离传感器组c和摄像头组件,其中距离传感器组c用于测量堆叠板材的高度,所述摄像头用于获取堆叠板材块侧面的图像;
6.所述长宽检测组件包括距离传感器组a、b,所述距离传感器组a包括分别设置在备料平台顶面的进料侧以及与进料侧相对一侧的距离传感器,所述距离传感器组b包括分别设置备料平台顶面上与进料侧垂直的两侧距离传感器,还包括设置在备料平台顶面的上方的高度距离传感器以及控制器;
7.所述重量检测组件包括设置在备料平台底面的重量传感器;
8.还包括控制器,所述控制器分别与厚度检测组件、重量检测组件、长宽检测组件连接,以接收所述厚度检测组件、重量检测组件、长宽检测组件的数据并进行密度计算。
9.进一步地,所述距离传感器组c包括至少一个距离传感器,所述距离传感器的感应方向正对板材堆叠块的顶面,用于检测其与板材堆叠块在高度方向上的距离。
10.进一步地,所述摄像头组件包括多个摄像头,所述多个摄像头沿高度方向部署在板材堆叠块的斜上方,且每个摄像头与叠板材顶面中心处呈不同的夹角,用于从不同高度
拍摄板材堆叠块侧面的测量图像。
11.进一步地,所述距离传感器组a包括四个距离传感器a1、a2、a3、a4,所述距离传感器a1、a2设置在进料侧,所述距离传感器a3、a4设置在与进料侧相对的一侧,所述距离传感器a1、a2、a3、a4在测量时的感应方向分别正对板材堆叠块的两个平行的侧面。
12.进一步地,所述距离传感器组b包括四个距离传感器b1、b2、b3、b4,所述距离传感器b1、b2、b3、b4每两个为一对,每对距离传感器分别设置在备料平台顶面上与进料侧垂直的的两侧,以使所述距离传感器a1、a2在测量时的传感感应方向正对板材堆叠块的侧面。
13.进一步地,所述备料平台顶面的每一侧沿均设有嵌入的滑轨以及设置在滑轨上的两个滑块,所述滑块上分别安装有距离传感器a1、a2、a3、a4、b1、b2、b3、b4。
14.一种堆叠板材密度识别方法,具体包括以下步骤:
15.接收厚度检测组件的数据并进行厚度计算,获得单板的厚度h及板材堆叠块中的单板数量n;
16.接收长宽检测组件的数据并进行长宽计算,获得单板的长度l、宽度w;
17.接收重量检测组件的重量数据m;
18.根据所述单板的厚度h、板材堆叠块中的单板数量n、单板的长度l、宽度w以及重量数据m,计算单板的密度
19.进一步地,所述接收厚度检测组件的数据并进行厚度计算,获得单板的厚度h及板材堆叠块中的单板数量n,具体包括以下步骤:
20.s001、获取距离传感器组c中距离传感器测量的与所述板材堆叠块顶面之间的第一距离d0;
21.s002、根据所述距离传感器组的距离传感器测量的与备料平台之间的第一预设距离dx0、第一距离d0,计算出板材堆叠块的高度h=dx1-d0;
22.s003、获取摄像头拍摄的测量图像,并判断所述测量图像中是否包含所有单板的侧面;
23.当判断测量图像中包含所有单板的侧面时,利用预先建立的识别模型获取所述测量图像中分界线数量k;
24.根据所述分界线数量k计算得到板材堆叠块的单板数量n;
25.s004、根据所述板材堆叠块的高度h、所述单板数量n,计算与所述板材堆叠块对应的单板的厚度h,所述h=h/n。
26.进一步地,所述接收长宽检测组件的数据并进行长宽计算,获得单板的长度l、宽度w,具体包括以下步骤:
27.s01、获取距离触感器组a测量的数据并生成坐标组aa,获取距离触感器组b测量的数据并生成坐标组bb;
28.s02、根据所述坐标组aa、坐标组bb计算边线方程组;
29.s03、根据所述边线方程组计算边线的交点组;
30.s04、根据所述交点组计算板材堆叠块的边距,即单板的长度l、宽度w。
31.一种堆叠板材密度识别的控制装置,其特征在于,包括:
32.一个或多个处理器;
33.存储单元,用于存储一个或多个程序,当所述一个或多个程序被所述一个或多个处理器执行时,能使得所述一个或多个处理器实现所述的一种堆叠板材密度识别方法。
34.本发明具有的有益效果:
35.1、通过支架组件上设置的距离传感器组a、b,分别获取堆叠板材的宽度w与长度l,其中支架组件为带有刻度线的矩形边框,每两个相对的边框上分别设置有两个对称的距离传感器,两个距离传感器通过滑块沿边框移动,从而测量不同尺寸大小的板材;
36.2、通过设置厚度检测组件、重量检测组件、长宽检测组件,自动确定板材堆叠块的长宽尺寸及高度尺寸、单板厚度、单板数量、堆叠板材块的重量,减少繁琐的人工操作,节省人力物力,避免人工操作的失误,降低人为错误率,提高自动净化效率。
37.3、分别部署在板材堆叠块上宽方向的至少两个距离传感器组,通过建立二维坐标系,获取板材堆叠块的四个顶点在预设坐标系中的坐标,通过坐标计算得到板材堆叠块的长l、宽w,通过高度方向上的距离传感器,获得高度h,用以解决现有的板材的全自动化净化过程中因板材堆叠块板摆放的位置与底板的位置其中心轴线不重合而产生的测量误差大的问题,通过摄像头组件从而获得板材堆叠块的两面视图或三面视图的测量图像,针对这两面视图或三面视图的测量图像进行切图与校正处预处理(透视变换方法),获得待识别板材侧视图,进而根据卷积神经网络进行单板厚度的识别,提高现有的板材的全自动化净化过程中单板厚度识别的准确性。
附图说明
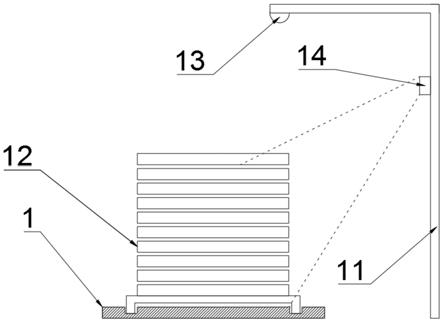
38.图1为本发明的识别系统示意图;
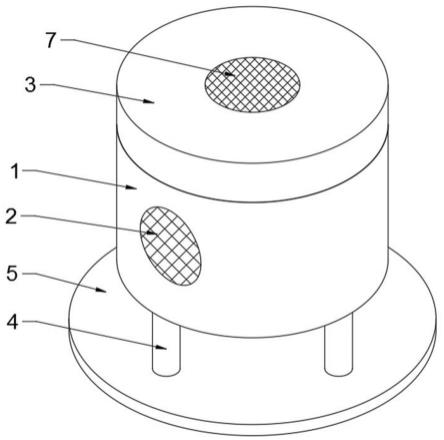
39.图2为本发明的备料平台示意图;
40.图3为本发明的第一距离d0示意图;
41.图4为本发明的第一预设距离dx0示意图;
42.图5为本发明的送料侧的滑轨示意图;
43.图6为本发明的备料平台上多个滑轨的结构示意图;
44.图7为本发明的长宽检测组件部署示意图;
45.图8为本发明的二维坐标系的示意图;
46.图9为本发明的厚度计算方法流程示意图;
47.图10为本发明的边距计算流程示意图;
48.图11为本发明的板材堆叠块的三面视图的测量图像;
49.图12为本发明的板材堆叠块的校正后的测量图像;
50.附图标记:1-备料平台,2-送料平台,3-直线驱动机构,4-枕木,5-卡槽,6-阻挡块,7-滑槽,8-滑轨,9-滑块,10-距离传感器,11-安装架,12-板材堆叠块,13-距离传感器组c,14-摄像头组件。
具体实施方式
51.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。以下对至少一个示例性实施例的描述实际上仅仅是说明性的,决不作为对本发明及其应用或使
用的任何限制。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
52.除非另外具体说明,否则在这些实施例中阐述的部件和步骤的相对布置、数字表达式和数值不限制本发明的范围。
53.同时,应当明白,为了便于描述,附图中所示出的各个部分的尺寸并不是按照实际的比例关系绘制的。
54.另外,为了清楚和简洁起见,可能省略了对公知的结构、功能和配置的描述。本领域普通技术人员将认识到,在不脱离本公开的精神和范围的情况下,可以对本文描述的示例进行各种改变和修改。
55.对于相关领域普通技术人员已知的技术、方法和设备可能不作详细讨论,但在适当情况下,所述技术、方法和设备应当被视为授权说明书的一部分。
56.在这里示出和讨论的所有示例中,任何具体值应被解释为仅仅是示例性的,而不是作为限制。因此,示例性实施例的其它示例可以具有不同的值。
57.实施例1
58.一种堆叠板材密度识别系统,包括用于放置堆叠板材的备料平台以及厚度检测组件、重量检测组件、长宽检测组件,其中:
59.所述厚度检测组件包括设置在备料平台上方的距离传感器组c和摄像头组件,其中距离传感器组c用于测量堆叠板材的高度,所述摄像头用于获取堆叠板材块侧面的图像;
60.所述长宽检测组件包括距离传感器组a、b,所述距离传感器组a包括分别设置在备料平台顶面的进料侧以及与进料侧相对一侧的距离传感器,所述距离传感器组b包括分别设置备料平台顶面上与进料侧垂直的两侧距离传感器,还包括设置在备料平台顶面的上方的高度距离传感器以及控制器;
61.所述重量检测组件包括设置在备料平台底面的重量传感器;
62.还包括控制器,所述控制器分别与厚度检测组件、重量检测组件、长宽检测组件连接,以接收所述厚度检测组件、重量检测组件、长宽检测组件的数据并进行密度计算。
63.具体的,所述距离传感器组c包括至少一个距离传感器,所述距离传感器的感应方向正对板材堆叠块的顶面,用于检测其与板材堆叠块在高度方向上的距离。
64.在一种实施例中,所述摄像头组件部署在板材堆叠块的斜上方,包括云台以及安装在云台上的摄像头,所述控制器分别与云台、摄像头连接。
65.具体的,所述摄像头及距离传感器组c安装在安装架上,所述安装架设置在距离板材堆叠块的对角线延长线上。
66.其中,该摄像头可以连接控制器,根据控制器的指令获取预定区域的测量图像,在控制器接收摄像头组件发送的图像后启动,进行图像中板材堆叠块的图像识别。
67.所述控制器和云台相连用于对云台进行的控制,云台和摄像头相连,用于控制摄像头的转动,mcu控制电路板通过usb-hub实现usb连接,pc端主要包括接口层和应用层,其中应用层用于显示用户ui界面,接口层用于实现人脸识别和人脸检测算法,同时接口层通过驱动软件对控制模块进行驱动。
68.具体的,摄像头组件可以长期处于开启状态,并按照预设时间间隔获取预定区域的测量图像,例如每隔1小时获取预定区域的图像进行识别。该摄像头组件还可以处于关闭
状态,可以在接收控制器的驱动指令后开启,并进行预定区域测量图像的获取。该摄像头组件包括多个摄像头,呈高度方向设置,并与板材堆叠块的中心轴线重合得安装在预定位置,以便在不同高度处拍摄板材堆叠块。
69.在板材进行自动化净化前,控制器驱动距离传感器组c测量其与备料平台之间的第一预设距离dx0。
70.在需要对板材进行自动化净化时,操作人员通过叉车将整齐码放的板材堆叠块运输至指定的备料平台上,通过控制器向距离传感器组发出检测指令、以及向摄像头组件发出拍摄指令,以获得距离传感器测量的第一距离d0,并获得摄像头组件拍摄的多张板材堆叠块的测量图像。
71.在本技术的一种实施例中,在具备枕木的备料平台上行进行板材堆叠块的高度h的计算时,还需要考虑枕木的厚度以及枕木与备料平台之间的间隙高度,而枕木的厚度以及枕木与备料平台之间的间隙高度可以通过实际测量得出,设为δh,则板材堆叠块的高度h=dx0-d0-δh。
72.具体的,所述系统还包括送料平台和直线驱动机构,所述备料平台设有两个,所述直线驱动机构用于将对应的备料平台经所述送料平台的进料侧输送至送料平台上。
73.本领域技术人员可以理解的是,直线驱动机构还可以为但不限制为同步带传动结构、或滚珠丝杠传动、或链条传动、或拉杆传动等。所述备料平台包括设置在自身顶部的至少两根枕木,所述枕木在备料平台上垂直于进料侧方向的位置可调。枕木的数量根据板材的尺寸自由选择。
74.所述送料平台为矩形,所述矩形的三个侧面为进料侧,其中三个侧面中的分别设置有备料平台。所述备料平台的底部远离送料平台的一侧还设置有阻挡块。
75.本实施例中,叉车将堆板材放置在备料平台上,为了便于理解,将备料平台标号为1,2,
…
等,通过直线驱动机构,将载有板材堆叠块的1号备料平台移动至送料平台上,等待人造板材的处理单元对人造板材的进行处理,当1号备料平台上的人造板材处理完毕时,通过直线驱动机构3,将1号备料平台退出送料平台至初始位置,并将载有板材堆叠块的2号备料平台移动至送料平台上,等待人造板材的处理单元对人造板材的进行处理,直到所有的备料平台1,2,
…
上的堆叠材均已处理完毕,发出提示以便人员进行再次放置人造板材。
76.具体的,所述距离传感器组a包括四个距离传感器a1、a2、a3、a4,所述距离传感器a1、a2设置在进料侧,所述距离传感器a3、a4设置在与进料侧相对的一侧,所述距离传感器a1、a2、a3、a4在测量时的感应方向分别正对板材堆叠块的两个平行的侧面。
77.具体的,所述距离传感器组b包括四个距离传感器b1、b2、b3、b4,所述距离传感器b1、b2、b3、b4每两个为一对,每对距离传感器分别设置在备料平台顶面上与进料侧垂直的的两侧,以使所述距离传感器a1、a2在测量时的传感感应方向正对板材堆叠块的侧面。
78.优选的,所述备料平台顶面的每一侧沿均设有嵌入的滑轨以及设置在滑轨上的两个滑块,所述滑块上分别安装有距离传感器a1、a2、a3、a4、b1、b2、b3、b4。
79.在需要对板材进行自动化净化时,操作人员通过叉车将整齐码放的板材堆叠块运输至指定的备料平台上,保证板材堆叠块与支架组件的中线轴线重合,通过调节边框上的滑块,使得边框上的距离传感器位于板材堆叠块处,通过刻度线保证相对的两个边框上的距离传感器对称设置并对称测量。通过距离传感器组a获得板材堆叠块的宽度值,通过距离
传感器组b获得板材堆叠块的长度值。
80.实施例2
81.一种堆叠板材密度识别方法,具体包括以下步骤:
82.接收厚度检测组件的数据并进行厚度计算,获得单板的厚度h及板材堆叠块中的单板数量n;
83.接收长宽检测组件的数据并进行长宽计算,获得单板的长度l、宽度w;
84.接收重量检测组件的重量数据m;
85.根据所述单板的厚度h、板材堆叠块中的单板数量n、单板的长度l、宽度w以及重量数据m,计算单板的密度
86.具体的,所述单板的厚度h及板材堆叠块中的单板数量n,具体包括以下步骤:
87.s001、获取距离传感器组c的距离传感器测量的与所述板材堆叠块顶面之间的第一距离d0;
88.s002、根据所述距离传感器组的距离传感器测量的与备料平台之间的第一预设距离dx0、第一距离d0,计算出板材堆叠块的高度h=dx0-d0;
89.s003、获取摄像头拍摄的测量图像,并判断所述测量图像中是否包含所有单板的侧面;
90.当判断测量图像中包含所有单板的侧面时,利用预先建立的识别模型获取所述测量图像中分界线数量k;
91.根据所述分界线数量k计算得到板材堆叠块的单板数量n;
92.当判断测量图像中没有包含所有单板的侧面时,发出调整摄像头拍摄方向的指令。
93.具体的,所述分界线的数量k为两个单板之间的分界线,板材堆叠块的单板数量n=k 1。
94.当判断测量图像中没有包含所有单板的侧面时,发出调整摄像头拍摄方向的指令。
95.s004、根据所述板材堆叠块的高度h、所述单板数量n,计算与所述板材堆叠块对应的单板的厚度h,所述h=h/n。
96.具体的,所述原始四个角点坐标,具体通过以下步骤获得:
97.在测量图像中进行直线检测,得到测量图像中四条边各自所对应的线段的两个端点;
98.根据每条边所对应的线段的两个端点,生成该条边对应的直线方程;
99.根据测量图像中四条边对应的直线方程,得到四个交点坐标,将四个交点坐标确定为原始四个角点坐标。
100.具体的,所述测量图像为在放置区域框的引导下获取的包含板材堆叠块侧面的测量图像;所述放置区域框用于引导摄像头调整拍摄角度以使所述板材堆叠块侧面区域位于放置区域框内进行拍摄;
101.所述在测量图像中进行直线检测包括:在对应所述放置区域框的每条边的预定范围内,对所述测量图像中进行直线检测。
102.具体的,所述在放置区域框的引导下获取的包含板材堆叠块侧面的测量图像,具体包括以下步骤:
103.获取当前拍摄的测量图像;
104.判断当前拍摄的测量图像中板材堆叠块侧面区域和放置区域框的iou是否大于预设的交并阈值,若小于,则提示调整摄像头拍摄角度,直到所述板材堆叠块侧面区域位于放置区域框内。
105.具体的,本装置通过旋转云台实现摄像头360
°
连续旋转。包括:
106.获取采集的测量图像,当检测到所述测量图像中包含板材堆叠块侧面时,确定板材堆叠块侧面在所述测量图像中的第一位置;
107.确定所述第一位置是否满足调整条件,如果是,则根据第二位置和所述第一位置确定摄像头的偏移角度,所述第二位置包括所述测量图像的中心位置,所述偏移角度的偏移方向包括上下左右四个方向;
108.根据所述偏移角度生成控制指令,所述控制指令用于控制和所述摄像头相连的云台使所述摄像头以所述偏移角度移动;
109.调整条件具体为放置区域框对比法:判断当前拍摄的测量图像中板材堆叠块侧面区域和放置区域框的iou是否大于预设的交并阈值,若小于,则提示调整摄像头拍摄角度,直到所述板材堆叠块侧面区域位于放置区域框内。
110.该偏移角度为摄像头的旋转角度,该旋转方向可以是上下左右四个方向,即该摄像头可四向转动。当摄像头偏移时,相应的采集画面的范围发生变化,测量图像画面中包含的板材堆叠块侧面在图像画面中的位置相应变化。在一个实施例中,数据库中存储了不同方向的偏移角度对应第一位置的变化距离,示例性的,摄像头沿一方向(如横向)转动5
°
图像画面中板材堆叠块侧面的第一位置在图像画面中相应平移2cm。具体的,计算第一位置和第二位置的距离值a,并计算该距离值在x轴和y轴的分量距离值ax和ay,根据数据库中存储的距离值和偏移角度的关系得到对应ax距离值的bx偏移角度,以及对应ay距离值的by偏移角度,其中,bx偏移角度为沿x轴旋转偏移的角度,by偏移角度为沿y轴旋转偏移的角度,将bx和by确定为当前摄像头需要转动的偏移角度。
111.示例性,该控制指令由控制器生成,如确定出的沿x轴的偏移角度bx为5
°
,沿y轴的偏移角度by为10
°
,则生成控制指令对云台进行控制,其中该云台上摄像头进行角度偏转,即通过下达控制指令使摄像头分别沿x轴和y轴旋转5
°
和10
°
。在另个一实施例中,所述云台为三轴云台,还可以计算出摄像头综合旋转的方位,如沿x轴y轴夹角30
°
方向进行旋转,即并非采用纯水平或纯垂直的方式旋转,采用有一定倾角的方位旋转。
112.其中,在获取采集的测量图像之前,还包括:
113.检测到板材堆叠块侧面识别事件触发时,控制摄像头进行画面拍摄;
114.如果检测到所述测量图像中不包含板材堆叠块侧面,则对所述测量图像进行部位识别;
115.根据部位识别结果确定第一偏移角度,根据所述第一偏移角度生成第一控制指令,所述第一控制指令用于控制和所述摄像头相连的云台使所述摄像头以所述第一偏移角度移动;
116.其中,所述根据部位识别结果确定第一偏移角度,根据所述第一偏移角度生成控
制指令,所述控制指令用于控制和所述摄像头相连的云台使所述摄像头以所述第一偏移角度移动包括:
117.根据部位识别结果在预设表中查找对应部位关联的偏移角度区间;
118.根据所述偏移角度区间生成控制指令组,所述控制指令组中的每个控制指令对应所述偏移角度区间中的一个偏移角度;
119.所述控制指令组用于控制和所述摄像头相连的云台使所述摄像头在所述偏移角度区间内移动或转动。
120.所述部位识别为板材堆叠块放置区域的部位,可以在堆叠板材自动化作业车间中的备料平台周边放置多个标识部位,根据不同标识部位确定不同的第一偏移角度。
121.通过对板材堆叠块的高效追踪,调节效率更高,使每次测量过程中的板材堆叠块侧面始终位于放置区域框内,不需要用户手动进行调节,达到降低用户操作难度,同时提高了拍摄角度调节准确性的效果,使得原始四个角点坐标的检测在对应所述放置区域框的每条边的预定范围内,对所述测量图像中进行直线检测,进而提高原始四个角点坐标计算的速度。
122.本发明实施例中,当通过图像模型识别出预设区域中板材堆叠块时,该控制器将该预定区域的板材堆叠块输入到预先建立的识别模型中,以获取该预定区域的图像中的板材堆叠块的分界线的数量。该识别模型存储在控制器中,在输入测量图像后启动。并且,该识别模型也可以为深度学习模型等,包括一个深度学习单元以及一个输出端,识别模型利用深度学习单元接收测量图像进行分析,然后从输出端输出分析结果。该深度学习单元可以为rnn学习单元、cnn学习单元以及lstm学习单元等。
123.本发明实施例中,该板材堆叠块固定地设置在预定区域内。例如,在进行板材自动化净化中,板材堆叠块放置由叉车放置在备料平台上。
124.本领域技术人员可以理解的是,通过识别模型,获取测量图像中板材堆叠块的分界线数量,包括对板材堆叠块的训练的测量图片进行初始标记,标记每张测量图片中的分界线数量,标记后的图像样本数据包括一张测量图片以及一个分界线数量的标签;
125.在一种实施例中,基于初始标记后的图像样本数据,训练神经网络;
126.利用训练好的神经网络,确定待标记后板材堆叠块在每一个分界线数量的置信度;其中,神经网络的输出是每个分界线数量的置信度最终估计值;根据这些估计值,选择置信度最高的分界线数量作为最终的输出。
127.在一种实施例中,基于初始标记后的图像样本数据,训练神经网络;
128.利用训练好的神经网络,确定待标记后板材堆叠块在每一个分界线数量的置信度;其中,神经网络的输出是每个分界线数量的置信度最终估计值;根据这些估计值,选择置信度最高的分界线数量作为最终的输出。
129.在一种实施例中,所述识别模型包括侧面识别模型、识别分界线模型。
130.将测量图像输入到侧面识别模型中,其中,所述侧面识别模型使用多组训练数据训练出来的,所述多组中的训练数据中的每一组训练数据均包括:板材堆叠块的图像和用来标识该板材堆叠块的侧面是否完整的标识信息;
131.获取所述模型的输出信息,其中,所述输出信息包括所述测量图像中的是否完整的标识。
132.将测量图像输入到板材堆叠块模型中;
133.从所述板材堆叠块模型中获取所述测量图像中是否包含所有单板侧面的信息,其中,所述侧面识别模型为使用多组数据通过机器学习训练得出的,所述多组数据包括第一类数据和第二类数据,所述第一类数据中的每组数据均包括:包含所有单板侧面的信息的图像和标识该照片包含所有单板侧面的信息的标签;第二类数据中的每组数据均包括:不包含所有单板侧面的信息的照片和标识该照片不包含所有单板侧面的信息的标签。
134.当所述测量图像不包含板材堆叠块时,向摄像头组件发出重新调整拍摄角度的指令。
135.具体的,所述单板的长度l、宽度w,具体包括以下步骤:
136.s01、获取距离触感器组a测量的数据并生成坐标组aa,获取距离触感器组b测量的数据并生成坐标组bb;
137.s02、根据所述坐标组aa、坐标组bb计算边线方程组;
138.s03、根据所述边线方程组计算边线的交点组;
139.s04、根据所述交点组计算板材堆叠块的边距,即单板的长度l、宽度w。
140.具体的,所述步骤s1具体包括以下步骤:
141.获取距离传感器组a的四个距离传感器a1、a2、a3、a4分别测量的与所述板材堆叠块对应的侧面之间的距离;
142.获取距离传感器组b的四个距离传感器b1、b2、b3、b4分别测量的与所述板材堆叠块对应的侧面之间的距离;
143.具体的,所述距离传感器a1、a2测量的距离为d1、d2,所述距离传感器a3、a4测量的距离为d3、d4;
144.所述距离传感器b1、b2测量的距离为d5、d6,所述距离传感器b3、b4测量的距离为d7、d8;
145.根据所述备料平台建立二维坐标系;
146.分别获取距离传感器组a、距离传感器组b中每个距离传感器在所述二维坐标系中的坐标,并根据每个距离传感器测量的距离确定距离传感器在板材堆叠块侧面的测量点坐标;
147.将距离传感器a1、a2、a3、a4的测量点坐标确定为坐标组aa;
148.将距离传感器b1、b2、b3、b4的测量点坐标确定为坐标组bb。
149.具体的,所述步骤s02具体包括以下步骤:
150.根据所述坐标组aa中a1、a2的测量点坐标确定第一边线方程l1,根据所述坐标组aa中a3、a4的测量点坐标确定第二边线方程l2;
151.根据所述坐标组bb中b1、b2的测量点坐标确定第三边线方程l3,根据所述坐标组bb中b3、b4的测量点坐标确定第四边线方程l4;
152.所述交点组为根据第一边线方程l1、第二边线方程l2、第三边线方程l3、第四边线方程l4计算得到的交点组,即四个交点o1、o2、o3、o4。
153.在一种实施例中,根据所述备料平台建立二维坐标系:以为x轴,以垂直于进料侧的侧边为y轴建立坐标系,以使所述备料平台位于所述二维坐标系的第一象限;
154.在每一次叉车放置板材堆叠块后,测量每个距离传感器与对应的底座的侧边之间
的距离,从而获得每个距离传感器相对于底座的位置关系,从而确定每个距离传感器在所述二维坐标系中的坐标。
155.本发明一种实施例中,在板材堆叠块的顶部上设置摄像头,当通过图像模型识别出预设区域中板材堆叠块时,该控制器将该预定区域的板材堆叠块输入到预先建立的识别模型中,以获取该预定区域的图像中的板材堆叠块的图像。其中,该预设的像素值与实际尺寸的对应关系已经存储在控制器的标准尺寸数据库中。该识别模型存储在控制器中,在输入测量图像后启动。并且,该识别模型也可以为深度学习模型等,包括一个深度学习单元以及一个输出端,识别模型利用深度学习单元接收测量图像进行分析,然后从输出端输出分析结果。该深度学习单元可以为rnn学习单元、cnn学习单元以及lstm学习单元等。上述识别模型可以使用算法或应用程序来进行建立。
156.本发明实施例中,该板材堆叠块固定地设置在预定区域内。例如,在进行板材自动化净化中,在控制器中存储有该板材堆叠块的实际高度值,以便作为计算参考的数值。
157.本领域技术人员可以理解的是,通过识别模型,获取测量图像中板材堆叠块像素值,每个板材堆叠块像素值对应唯一一个实际尺寸值,通过查询匹配法,获取实际中每帧测量图像中板材堆叠块对应的实际长宽值。
158.在一种实施例中,在所述摄像头至所述板材堆叠块的视场中,在距离所述摄像头预设距离的位置处设置所述板材堆叠块的标定窗口,其中所述标定窗口具有预定的物理窗口尺寸;基于所述标定窗口的窗口像素值和所述板材堆叠块像素值以及所述物理窗口尺寸估计所述板材堆叠块相对于所述标定窗口的物理板材堆叠块尺寸,其中所述窗口尺寸与所述板材堆叠块尺寸的像素比和物理尺寸比相等。
159.其中,还可以在预设区域上粘贴有已知尺寸的贴纸等标志作为参考,这里不做限定。并且,该标定窗口可移动地设置于预定区域内,即该标定窗口是可以移动的,在进行板材堆叠块高度测量时可以由工作人员放置在该预定区域内的任意位置。例如,该参照物可以为一个立方体,且尺寸已知并存储在控制器中。
160.在一种实施例中,通过板材堆叠块不同高度处的多个摄像头拍摄的测量图像,获得每帧测量图像中板材堆叠块的像素高度,通过查找法,匹配与所述每个像素高度匹配的高度hi,并计算板材堆叠块修正因子高度并用所述板材堆叠块高度h0对高度距离传感器测量的高度值h进行校正,从而获得板材堆叠块的高度h。
161.实施例3
162.一种堆叠板材密度识别的控制装置,其特征在于,包括:
163.一个或多个处理器;
164.存储单元,用于存储一个或多个程序,当所述一个或多个程序被所述一个或多个处理器执行时,能使得所述一个或多个处理器实现所述的一种堆叠板材密度识别方法。
165.实施例4,一种计算机可读存储介质,其上存储有计算机程序,所述计算机程序被处理器执行时能实现所述的一种堆叠板材密度识别方法。
166.以上所述,仅是本发明的较佳实施例而已,并非对本发明作任何形式上的限制,依据本发明的技术实质,在本发明的精神和原则之内,对以上实施例所作的任何简单的修改、等同替换与改进等,均仍属于本发明技术方案的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。