技术特征:
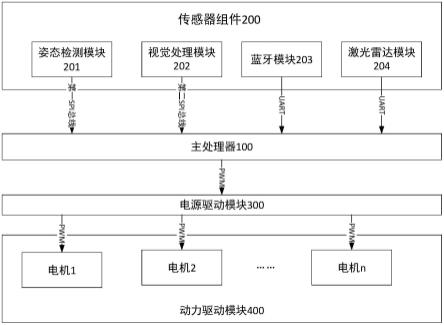
1.一种基于高速总线架构的无人机控制系统,用于多旋翼无人机,其特征在于,包括:主处理器、传感器组件、电源驱动模块、以及动力驱动模块;其中,所述传感器组件至少包括姿态检测模块、视觉处理模块、蓝牙模块以及激光雷达模块;所述姿态检测模块用于向所述主处理器提供加速计、磁强计、陀螺仪、以及加速度的数据信息;所述视觉处理模块用于向所述主处理器提供所述多旋翼无人机对应上位机的控制数据信息;所述蓝牙模块用于向所述主处理器提供当前视觉数据信息;所述激光雷达模块用于向所述主处理器提供当前的的高度数据信息;所述姿态检测模块的输出端通过第一高速数据传输通道连接到所述主处理器的第一输入端;所述视觉处理模块的输出端通过第二高速数据传输通道连接到所述主处理器的第二输入端;所述蓝牙模块的输出端通过第一uart串口连接到所述主处理器的第三输入端,所述激光雷达模块的输出端通过第二uart串口连接到所述主处理器的第四输入端;所述主处理器的输出端通过pwm(脉冲宽度调制)线连接到电源驱动模块的输入端,所述电源驱动模块的输出端连接到所述动力驱动模块,所述动力驱动模块中包含预设数量个电机。2.根据权利要求1所述的无人机控制系统,其特征在于,所述无人机控制系统进一步被配置为:主处理器接收到所述传感器组件传输的多个数据信息后,对所述多个数据信息进行滤波处理、提高可信度处理以及双环串级pid控制处理,生成与所述动力驱动模块中的预设数量个电机相对应数量的pwm波信号,并传输至所述电源驱动模块。3.根据权利要求2所述的无人机控制系统,其特征在于,所述无人机控制系统还包括动力电池,所述动力电池通过第一模数转换器连接到电源驱动模块的一端,所述电源驱动模块的另一端在通过第二模数转换器连接到所述主处理器;其中,所述主处理器通过所述第一模数转换器和第二模数转换器检测当前动力电池的电压值,以检测所述当前电量是否高于所述多旋翼无人机的最低运行水平。4.根据权利要求1所述的无人机控制系统,其特征在于,所述无人机控制系统的软件架构基于μc/os
‑ⅱ
实时操作系统建立,用于执行对所述传感器组件数据采集、多旋翼无人机姿态解算、飞行控制计算以及数据通信。5.根据权利要求4所述的无人机控制系统,其特征在于,所述第一高速数据传输通道包括第一spi总线和fifo模块;所述姿态检测模块的输出端连接到所述第一spi总线的一端,所述第一spi总线的另一端连接fifo模块的一端,所述fifo模块的另一端连接到所述主处理器的第一输入端;其中,在所述第一高速数据传输通道下,所述主处理器配置为主机模式,用于设置spi数据通信协议接口并连接fifo模块,以获取所述姿态检测模块中的数据信息。6.根据权利要求4所述的无人机控制系统,其特征在于,所述第二高速数据传输通道包括第二spi总线和dma模块,所述视觉处理模块的输出端连接到所述第二spi总线的一端,所述第二spi总线的另一端连接dma模块的一端,所述dma模块的另一端连接到所述主处理器的第二输入端;
其中,在所述第二高速数据传输通道下,所述主处理器配置为从机模式,用于设置spi数据通信协议接口并连接到dma模块,以获取所述视觉处理模块采集的外部图像信息。7.根据权利要求6所述的无人机控制系统,其特征在于,所述视觉处理模块采集的外部图像信息后进行数据处理的速度,在任务的触发方式上采用μc/os
‑ⅱ
实时操作系统中的中断触发。8.根据权利要求1所述的无人机控制系统,其特征在于,所述姿态检测模块包括mpu6500传感器和lsm303d传感器。9.一种多旋翼无人机,其特征在于,包括:如权利要求1-8所述的无人机控制系统。
技术总结
本申请涉及一种基于高速总线架构的无人机控制系统,包括主处理器、传感器组件、电源驱动模块、以及动力驱动模块;其中,所述传感器组件至少包括姿态检测模块、视觉处理模块、蓝牙模块以及激光雷达模块。本申请中所述姿态检测模块的输出端通过第一高速数据传输通道连接到所述主处理器的第一输入端;所述视觉处理模块的输出端通过第二高速数据传输通道连接到所述主处理器的第二输入端。本申请针对主处理器与不同模块的通信分别设计了对应的SPI高速数据传输通道,实现了保证数据通信可靠性的前提下,内部数据传输效率的有效提升。内部数据传输效率的有效提升。内部数据传输效率的有效提升。
技术研发人员:杨凡 黄杰 杨成 张仕龙 左迅 杨川 丁睿杰 喻涛
受保护的技术使用者:重庆理工大学
技术研发日:2022.07.28
技术公布日:2022/9/6
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。