基于ros系统的消防机器小车
技术领域
1.本实用新型涉及机器人技术领域,特别涉及一种消防机器人。
背景技术:
2.火灾是指在时间或空间上失去控制的灾害性燃烧现象,在各种灾害中,火灾是最经常、最普遍地威胁公众安全和社会发展的主要灾害之一,为了保护消防人员的安全,衍生出一种代替消防人员进行高危环境的消防机器人,消防人员可以对消防机器人进行远程控制,使消防机器人可以进入火灾现场进行灭火和救援工作。
3.在现有的消防机器人行业中,主要存在以下问题:消防机器人场景应用单一化;现有市场大都是面向消防安全的大型化、人为控制为主的机器人,缺乏更为灵活、且同时兼备监控、预警、灭火等功能为一体的小型化机器装备。
技术实现要素:
4.针对现有技术中存在的不足,本实用新型提供了一种基于ros系统的消防机器小车,解决现有消防机器人规格过大,控制不够灵活方便的问题。
5.本实用新型的目的是这样实现的:一种基于ros系统的消防机器小车,包括车体,所述车体的顶部经支撑杆安装有灭火平台,所述灭火平台上安装有水箱、水泵、升降推杆以及喷嘴,所述喷嘴安装在升降推杆的顶端,所述喷嘴经软管与水泵相连,水泵经软管与水箱相连,所述灭火平台的底部设有电池,所述车体的正面设有电子屏幕,电子屏幕用以显示电池电量。
6.本实用新型将灭火设备全部集成在车顶,占用空间较小,解决了消防机器人大型化的问题;电池置于灭火平台的底部可避免电池沾水,电子屏幕可显示电池电量,方便更换电池。
7.与现有技术相比,本实用新型的有益效果在于:
8.本实用新型结构紧凑,实现了小型化,操控更加方便,伸缩推杆可调节喷水高度,提高了灭火精度,电池置于灭火平台下方更加安全,设置了电子屏幕,可即使了解电池电量,使得本实用新型运行更加稳定。
9.为了使得本实用新型控制更加方便,所述车体采用麦克纳姆轮。麦克纳姆轮使得车体移动更加方便。
10.为了提高本实用新型的控制精度,所述车体的顶部设有雷达单元。小车运动时,雷达单元会不停地扫描周围环境并生成雷达图,使得控制更加精确。
11.为了使得本实用新型控制更加便捷,所述灭火平台上还设有集成电路装置,所述集成电路装置与水泵、升降推杆电连接,用以控制水泵、升降推杆工作。集成电路装置置于灭火平台的顶部通过电线直连的方式控制水泵与升降推杆,更加便捷的实现控制。
12.为了进一步提高本实用新型的控制精度,所述灭火平台的正面设有摄像头,用以采集车体正面图像。摄像头可将现场图像数据发回控制端,从而进一步提升控制精度。
13.作为本年实用新型的进一步限定,所述支撑杆采用铝型材。铝型材结构简单,组装方便,成本交底。
附图说明
14.为了更清楚地说明本实用新型实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本实用新型的实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据提供的附图获得其他的附图。
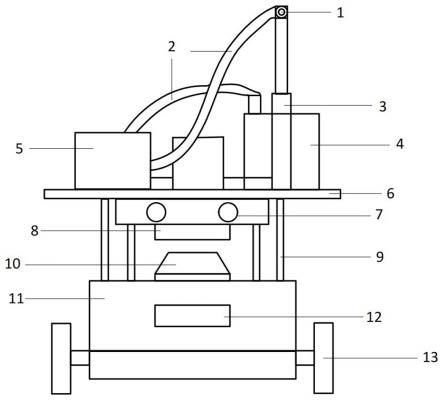
15.图1为本实用新型的整体结构主视图。
16.图2为本实用新型的整体结构左视图。
17.图3为本实用新型的整体结构俯视图。
18.其中,1喷嘴,2软管,3升降推杆,4水箱,5水泵,6灭火平台,7摄像头,8电池,9支撑杆,10雷达单元,11车体,12电子屏幕,13麦克纳姆轮,14集成电路装置。
具体实施方式
19.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
实施例
20.如图1-3所示的一种基于ros系统的消防机器小车,包括车体11,车体11内集成有ros控制系统,车体11采用麦克纳姆轮13,车体11的顶部经支撑杆9(本实施例中采用铝型材)安装有灭火平台6,实施例中可采用平板与铝型材配合完成装配,车体11的顶部设有雷达单元10,灭火平台6上安装有水箱4、水泵5、升降推杆3以及喷嘴1,水箱4、水泵5均采用小型结构,喷嘴1安装在升降推杆3的顶端,喷嘴1经软管2与水泵5相连,水泵5经软管2与水箱4相连,灭火平台6上还设有集成电路装置14,集成电路装置14与水泵5、升降推杆3电连接,用以控制水泵5、升降推杆3工作,集成电路装置14内置有红外传感器,灭火平台6的底部设有电池8,灭火平台6的正面设有摄像头7,用以采集车体11正面图像,车体11的正面设有电子屏幕12,电子屏幕12用以显示电池8电量。
21.本实用新型由后方主机控制,小车中的ros系统与主机间由无线网络相连接,ros控制系统将摄像头7拍摄到的画面实时传输到后方主机,方便操纵者观察小车前方的路况及所处的环境,集成电路装置14中的红外传感器可以感知小车周围的温度,帮助小车确定火源方向,从而控制小车前往指定地点灭火;小车运动时,雷达单元10会不停地扫描周围环境并生成雷达图,为操纵者提供便利。
22.以上实施例的说明只是用于帮助理解本实用新型的方法及其核心思想。应当指出,对于本技术领域的普通技术人员来说,在不脱离本实用新型原理的前提下,还可以对本实用新型进行若干改进和修饰,这些改进和修饰也落入本实用新型权利要求的保护范围内。
技术特征:
1.一种基于ros系统的消防机器小车,其特征在于,包括车体(11),所述车体(11)的顶部经支撑杆(9)安装有灭火平台(6),所述灭火平台(6)上安装有水箱(4)、水泵(5)、升降推杆(3)以及喷嘴(1),所述喷嘴(1)安装在升降推杆(3)的顶端,所述喷嘴(1)经软管(2)与水泵(5)相连,水泵(5)经软管(2)与水箱(4)相连,所述灭火平台(6)的底部设有电池(8),所述车体(11)的正面设有电子屏幕(12),电子屏幕(12)用以显示电池(8)电量。2.根据权利要求1所述的基于ros系统的消防机器小车,其特征在于,所述车体(11)采用麦克纳姆轮(13)。3.根据权利要求1或2所述的基于ros系统的消防机器小车,其特征在于,所述车体(11)的顶部设有雷达单元(10)。4.根据权利要求1或2所述的基于ros系统的消防机器小车,其特征在于,所述灭火平台(6)上还设有集成电路装置(14),所述集成电路装置(14)与水泵(5)、升降推杆(3)电连接,用以控制水泵(5)、升降推杆(3)工作。5.根据权利要求1或2所述的基于ros系统的消防机器小车,其特征在于,所述灭火平台(6)的正面设有摄像头(7),用以采集车体(11)正面图像。6.根据权利要求1或2所述的基于ros系统的消防机器小车,其特征在于,所述支撑杆(9)采用铝型材。
技术总结
本实用新型公开了机器人技术领域一种基于ROS系统的消防机器小车,包括车体,车体的顶部经支撑杆安装有灭火平台,灭火平台上安装有水箱、水泵、升降推杆以及喷嘴,喷嘴安装在升降推杆的顶端,喷嘴经软管与水泵相连,水泵经软管与水箱相连,灭火平台的底部设有电池,车体的正面设有电子屏幕,电子屏幕用以显示电池电量,本实用新型解决现有消防机器人规格过大,控制不够灵活方便的问题,可用于灭火中。可用于灭火中。可用于灭火中。
技术研发人员:陈子韬 王芹 潘祯颀 王恩赐 裔扬
受保护的技术使用者:扬州大学
技术研发日:2022.04.29
技术公布日:2022/9/6
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。