1.本实用新型涉及综采工作面定位技术领域,尤其涉及到一种综采工作面定位基站。
背景技术:
2.随着煤炭开采深度不断增加,开采技术不断提高,煤炭综采工作面逐步向信息化、自动化发展。为了在采掘工作面推进过程中有效保障深入其中的人员安全,杜绝设备伤人事故,或实现人员车辆定位、报警、考勤管理等各项功能,需对综采工作面人员进行精确定位。
3.目前在综采工作面应用时,通常根据井下测绘地图结果,提前规划好定位基站的位置,作为不再移动的定位基准点。人员、车辆携带标识卡,定位基站会定期发送uwb脉冲信号给人员、车辆标识卡,后者接收此信号,并将时间信息返回给定位基站,定位基站将标识卡时间信息上传给定位引擎,以使定位引擎通过计算标识卡与定位基站之间的精确距离信息,实现对综采工作面人员的定位。
4.然而上述对综采工作面人员定位的方式是以定位基站是固定为前提,随着采煤进程的推进,定位基站会随着液压支架移动,但是现有定位系统中,定位基站位置必须固定,一旦位置变化,会严重影响测量结果,进而导致综采工作面人员定位精度较低。
技术实现要素:
5.有鉴于此,本实用新型提供了一种综采工作面定位基站,能够解决综采工作面人员定位精度低的技术问题。
6.为实现上述目的,本实用新型提供了一种综采工作面定位基站,所述综采工作面定位基站安装于综采工作面的任一液压支架中,用于进行综采工作面的人员定位,包括:核心处理单元、基站位置感知单元、行程传感器数据处理单元、有线和无线通信单元、uwb信号处理单元;
7.所述核心处理单元与所述基站位置感知单元、所述行程传感器数据处理单元连接,用于基于所述基站位置感知单元和所述行程传感器数据处理单元获取定位基站的移动信息,并根据所述移动信息修正所述定位基站的位置坐标,其中,所述移动信息包括安装所述定位基站的目标液压支架相对于其他液压支架的移动距离、所述目标液压支架的移动方向以及所述目标液压支架与刮板机之间的距离;
8.所述uwb信号处理单元与所述核心处理单元连接,用于检测标识卡信息,并将所述标识卡信息发送至所述核心处理单元,以使所述核心处理单元通过所述有线和无线通信单元,将所述定位基站的位置坐标以及所述标识卡信息发送至液压支架控制器网络,利用所述液压支架控制器网络实现对综采工作面的人员定位,其中,所述标识卡信息包括标识卡标签以及所述标识卡标签的检测时间。
9.可选地,所述基站位置感知单元包括激光雷达、惯性导航设备,所述激光雷达用于
检测安装所述定位基站的目标液压支架相对于其他液压支架的移动距离,所述惯性导航设备用于检测所述目标液压支架的移动方向。
10.可选地,所述行程传感器数据处理单元包括设置于所述目标目标液压支架和刮板机之间的行程传感器,所述行程传感器用于检测所述目标液压支架与刮板机之间的距离。
11.可选地,所述综采工作面定位基站还包括电源处理单元;
12.所述电源处理单元包括第一级保护电路、第二级保护电路,以及电源转换电路,所述第一级保护电路用于在接入矿井下本安电源输出的本安直流电压时,对电源进行过流保护;
13.所述第二级保护电路与所述第一级保护电路连接,用于在所述第一级保护电路导通时,对导通电压进行瞬时电流抑制;
14.所述电源转换电路与所述第二级保护电路连接,用于在所述第二级保护电路导通时,对导通电压进行直流电压转换,得到所述综采工作面定位基站中任一工作单元的工作电压。
15.可选地,所述第一级保护电路包括电源管理芯片、场效应晶体管,所述电源管理芯片通过第一外围电路与所述场效应晶体管连接,用于在通电瞬间根据瞬时电流大小控制所述场效应晶体管的通断,实现对电源的过流保护。
16.可选地,所述第二级保护电路包括第一二极管、第二二极管、第一电阻、第二电阻、第三电阻、第一mos管、第二mos管、极性电容以及热敏电阻,所述电源转换电路包括直流电压转换芯片;
17.所述第一二极管的负极与所述第一电阻和所述第二电阻的第一端,以及所述第一mos管的源极连接,所述第一二极管的正极与所述第一电阻的第二端,以及所述第一mos管的漏极连接;
18.所述第二电阻的第二端和所述第一mos管的栅极与所述第二mos管的源极连接,所述第二mos管的栅极通过所述第三电阻与所述第二二极管的正极连接,所述第二二极管的负极与所述第一二极管的正极连接,所述第二mos管的漏极接地;
19.所述极性电容的正极与所述第二mos管的栅极连接,所述极性电容的负极接地;
20.所述第一二极管的正极、所述第一电阻的第二端,以及所述第一mos管的漏极通过所述热敏电阻与所述直流电压转换芯片的第二外围电路连接,用于将所述第二级保护电路的导通电压通过所述第二外围电路传输至所述直流电压转换芯片,利用所述直流电压转换芯片对所述导通电压进行直流电压转换,得到所述综采工作面定位基站中任一工作单元的工作电压。
21.可选地,所述综采工作面定位基站还包括本安型无线遥控器,所述本安型无线遥控器用于通过所述有线和无线通信单元向所述液压支架控制器网络发送控制信号,以使所述液压支架控制器网络根据所述控制信号执行对液压支架的控制。
22.可选地,所述综采工作面定位基站包括led指示灯,所述led指示灯用于对所述定位基站或液压支架控制器网络的工作状态进行提示。
23.可选地,所述综采工作面定位基站还包括数据存储模块,所述数据存储模块用于在所述有线和无线通信单元异常时,存储所述定位基站的位置坐标以及所述标识卡信息,并在所述有线和无线通信单元恢复后,利用所述有线和无线通信单元,将所述定位基站的
位置坐标以及所述标识卡信息发送至液压支架控制器网络。
24.本实用新型提供了一种综采工作面定位基站,该综采工作面定位基站安装于综采工作面的任一液压支架中,用于进行综采工作面的人员定位,包括:核心处理单元、基站位置感知单元、行程传感器数据处理单元、有线和无线通信单元、uwb信号处理单元;可利用基站位置感知单元和行程传感器数据处理单元实时获取定位基站的移动信息,并根据移动信息修正定位基站的位置坐标;进一步的,可利用uwb信号处理单元检测人员所携带标识卡的标识卡信息;最后利用核心处理单元通过有线和无线通信单元,将定位基站的位置坐标以及标识卡信息发送至液压支架控制器网络,利用液压支架控制器网络实现对综采工作面的人员定位。通过本实用新型中的技术方案,定位基站可实现自我位置感知,以及对自身位置的调节,以向液压支架控制器网络实时发送定位基站的精准位置坐标,进而可确保依据定位基站的位置坐标对综采工作面内人员定位的准确性,保障深入其中的人员安全,杜绝设备伤人事故。
25.上述说明仅是本实用新型技术方案的概述,为了能够更清楚了解本实用新型的技术手段,而可依照说明书的内容予以实施,并且为了让本实用新型的上述和其它目的、特征和优点能够更明显易懂,以下特举本实用新型的具体实施方式。
附图说明
26.此处所说明的附图用来提供对本实用新型的进一步理解,构成本实用新型的一部分,本实用新型的示意性实施例及其说明用于解释本实用新型,并不构成对本实用新型的不当限定。在附图中:
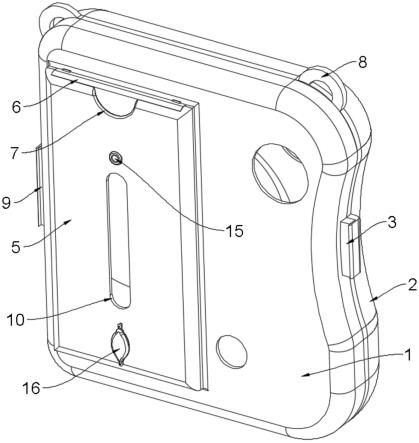
27.图1示出了本实用新型实施例提供的一种综采工作面定位基站的结构示意图;
28.图2示出了本实用新型实施例提供的一种综采工作面采煤控制的实例示意图;
29.图3示出了本实用新型实施例提供的另一种综采工作面采煤控制的实例示意图;
30.图4示出了本实用新型实施例提供的电源处理单元的电路连接示意图;
31.图5示出了本实用新型实施例提供的一种传统综采工作面人员定位的结构示意图;
32.图中:
33.1-核心处理单元;
34.2-基站位置感知单元,21-激光雷达,22-惯性导航设备;
35.3-行程传感器数据处理单元,31-行程传感器;
36.4-有线和无线通信单元;
37.5-uwb信号处理单元;
38.6-电源处理单元,61-第一级保护电路,62-第二级保护电路,63-电源转换电路;
39.7-本安型无线遥控器;
40.8-led指示灯(图中未示出);
41.9-数据存储模块(图中未示出)。
具体实施方式
42.在本实用新型的描述中,需要理解的是,术语“中心”、“纵向”、“横向”、“长度”、“宽
度”、“厚度”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”“内”、“外”、“顺时针”、“逆时针”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。
43.此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括一个或者更多个该特征。在本实用新型的描述中,“多个”的含义是两个或两个以上,除非另有明确具体的限定。
44.在本实用新型中,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”、“固定”等术语应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本实用新型中的具体含义。
45.下文中将参考附图并结合实施例来详细说明本实用新型。需要说明的是,在不冲突的情况下,本实用新型中的实施例及实施例中的特征可以相互组合。
46.下面结合图1至图4描述根据本实用新型一些实施例的综采工作面定位基站。
47.相比于传统定位基站位置始终固定的方式,本实用新型提供了一种能够实现对自我位置感知,以及对自身位置调节的综采工作面定位基站,该综采工作面定位基站安装于综采工作面的任一液压支架中,用于进行综采工作面的人员定位。如图1所示,综采工作面定位基站可包括:核心处理单元1、基站位置感知单元2、行程传感器数据处理单元3、有线和无线通信单元4、uwb信号处理单元5;核心处理单元1与基站位置感知单元2、行程传感器数据处理单元3连接,用于基于基站位置感知单元2和行程传感器数据处理单元3获取定位基站的移动信息,并根据移动信息修正定位基站的位置坐标,其中,移动信息包括安装定位基站的目标液压支架相对于其他液压支架的移动距离、目标液压支架的移动方向以及目标液压支架与刮板机之间的距离;uwb信号处理单元5与核心处理单元1连接,用于检测标识卡信息,并将标识卡信息发送至核心处理单元1,以使核心处理单元1通过有线和无线通信单元4,将定位基站的位置坐标以及标识卡信息发送至液压支架控制器网络,利用液压支架控制器网络实现对综采工作面的人员定位,其中,标识卡信息包括标识卡标签以及标识卡标签的检测时间。
48.本实施例中,核心处理单元1类似于电脑的cpu,可用于处理综采工作面定位基站中各个单元模块对应各种数据和转发,以及协调各个单元有效的工作。有线和无线通信单元4可以是有线rj45接口的以太网单元,千兆百兆或者十兆,或者光纤接口,同时也可支持wi-fi等高速无线网络,还支持zigbee,lora,433mhz频率的控制用无线网络。在具体的应用场景中,如图1所示,有线和无线通信单元4可接入现有的液压支架控制器网络,不再是单独为定位设置的独有网络,一般可以是can总线,也可以是rs485,rs232等,这样可以减少现场的网络设备,降低系统复杂程度。相应的,综采工作面定位基站还可包括本安型无线遥控器7,本安型无线遥控器7类似于电视的遥控器,用于对现场液压支架进行无线控制。具体的,可用于通过有线和无线通信单元4向液压支架控制器网络发送控制信号,以使液压支架控制器网络根据控制信号执行对液压支架的控制。
49.在具体的应用场景中,示例性的,如图1所示,基站位置感知单元2可包括激光雷达21、惯性导航设备22。其中,激光雷达21是广泛应用于无人驾驶,扫地机,室内人员检测等领域的成熟模块单元,通过利用激光发射会被物体反射和光学三角定位的原理,可以检测出探测区域的物体,空间轮廓等。在定位基站上使用时,激光雷达21可以定期检测安装定位基站的目标液压支架与现场环境中其他不动的液压支架之间的相对距离,其检测面可以360度旋转,因此四周的物体距离都可以检测。如图2所示,液压支架(1)到(5)处于同一位置,随着采煤机的移动,液压支架(5)向右移动了距离l,此时假设定位基站安装于此液压支架上,则一定会导致现场定位产生误差。此时,由于增加了激光雷达,可以检测到自身相对于支架4移动了l距离,避免了定位产生误差。除此之外,激光雷达21还可检测现场人员位置,增加了基站的功能。惯性导航设备22具体可为陀螺仪,其主要用于检测定位基站的运动趋势和距离,如图2,液压支架(5)某些时刻可能会相对于采煤机,反方向移动,因此需要惯性导航设备22来判断目标液压支架的移动方向。
50.相应的,示例性的,如图1所示,行程传感器数据处理单元3可包括各种行程传感器31,比如0至5v模拟信号接口的、rs485/rs232等数字接口的等。如图3所示,行程传感器31一般安装于液压支架与刮板机之间,测量两者之间的距离,安装于液压支架上的定位基站,根据此数据就可以判断支架移动的距离,进而可依据安装定位基站的目标液压支架相对于其他液压支架的移动距离、目标液压支架的移动方向以及目标液压支架与刮板机之间的距离,实现对定位基站位置的修正,即重新确定出定位基站当前位置所在的坐标。
51.在具体的应用场景中,如图1以及图4所示,综采工作面定位基站还包括电源处理单元6;电源处理单元6包括第一级保护电路61、第二级保护电路62,以及电源转换电路63,第一级保护电路61用于在接入矿井下本安电源输出的本安直流电压时,对电源进行过流保护;第二级保护电路62与第一级保护电路61连接,用于在第一级保护电路61导通时,对导通电压进行瞬时电流抑制;电源转换电路63与第二级保护电路62连接,用于在第二级保护电路62导通时,对导通电压进行直流电压转换,得到综采工作面定位基站中任一工作单元的工作电压。其中,第一级保护电路61输入的本安直流电压可为12v直流电压,第二级保护电路62输出的电压约为11.3v的直流电压。
52.其中,第一级保护电路61为主动式的,采用凌特公司的ltc4210芯片,用于在通电瞬间对电流进行控制,减少瞬时电流。由于每种设备都有负载,瞬间通电会产生很大的瞬时电流,会高于正常工作电流的几倍大小。瞬时电流持续时间约在几十us到几ms左右,对供电电源产生很大的影响,有时会造成电源瞬间电流过大而保护,导致后端负载无法正常上电,尤其是矿井下的供电设备,为了安全起见,电源供电能力较低,过流保护速度很快,通常瞬时电流超过保护电流之后,几十us之后就会断电保护。因此非常有必要增加此电路进行保护。同时还可以设置启动电压,避免低压情况下系统反复重启。具体的,如图4所示,第一级保护电路61包括电源管理芯片u37(ltc4210芯片)、场效应晶体管q50(yjs18n03a),电源管理芯片u37通过图4中所示的第一外围电路与场效应晶体管q50连接,用于在通电瞬间根据瞬时电流大小控制场效应晶体管q50的通断,实现对电源的过流保护。可当瞬时电流大于第一预设电流阈值或小于第二预设电流阈值时,控制场效应晶体管q50关断;当瞬时电流小于或等于第一预设电流阈值且大于或等于第二预设电流阈值时,控制场效应晶体管q50导通,其中,第一预设电流阈值大于第二预设电流阈值,具体电流阈值的设定大小可根据实际应
用场景进行设定,在此不进行具体的限定。
53.相应的,第二级保护电路62是分立器件组成的一个可以条件启动电压的瞬时电流抑制电路,如图4所示,第二级保护电路62包括第一二极管d2、第二二极管d5、第一电阻r3、第二电阻r2、第三电阻r4、第一mos管q1(irlml5203)、第二mos管q2(2n7002k)、极性电容c3以及热敏电阻fr1,电源转换电路63包括直流电压转换芯片u1(rt7297b);第一二极管d2的负极与第一电阻r3和第二电阻r2的第一端,以及第一mos管q1的源极连接,第一二极管d2的正极与第一电阻r3的第二端,以及第一mos管q1的漏极连接;第二电阻r2的第二端和第一mos管q1的栅极与第二mos管q2的源极连接,第二mos管q2的栅极通过第三电阻r4与第二二极管d5的正极连接,第二二极管d5的负极与第一二极管d2的正极连接,第二mos管d5的漏极接地;极性电容c3的正极与第二mos管q2的栅极连接,极性电容c3的负极接地;第一二极管d2的正极、第一电阻r3的第二端,以及第一mos管q1的漏极通过热敏电阻fr1与直流电压转换芯片u1的第二外围电路连接,用于将第二级保护电路62的导通电压通过第二外围电路传输至直流电压转换芯片u1,利用直流电压转换芯片u1对导通电压进行直流电压转换,得到综采工作面定位基站中任一工作单元的工作电压。在第二级保护电路62工作时,当第一级保护电路61的导通电压输入超过第二二极管d5(mmsz5228b-7-f)以及第二mos管q2(2n7002k)组成的导通电压之后(本电路设置为3.9 1.5=6.4v),通过第三电阻r4给极性电容c3缓慢充电,使得第二mos管q2缓慢导通,随后第一mos管q1导通,导通电压电压通过第一mos管q1、热敏电阻fr1后给直流电压转换芯片u1(rt7297b)供电,进一步利用直流电压转换芯片u1将12v直流电压转换为综采工作面定位基站中各个单元模块的工作电压,其中,各个单元模块的工作电压电压可根据实际应用场景进行设定,如可为5v,3.3v等低压。
54.在具体的应用场景中,为实现对定位基站或液压支架控制器网络的工作状态的提示,综采工作面定位基站还可包括led指示灯8,led指示灯8可用于在定位基站或液压支架控制器网络正常工作、故障或成功建立通信时,进行闪烁或保持常亮。其中,led指示灯的工作时间,以及工作时对应指示灯的工作状态(如灯光颜色、闪烁周期、闪烁时长等)可以针对用户需求进行个性化定制,在此不进行具体的限定。对于本实施例,通过在综采工作面定位基站中加入led指示灯,可实现与现有控制系统的功能共享,减少现场设备复杂度。
55.在具体的应用场景中,为了实现对液压支架的有效及时控制,作为一种可选方式,综采工作面定位基站还包括数据存储模块9,数据存储模块9用于在有线和无线通信单元异常时,存储定位基站的位置坐标以及标识卡信息,并在有线和无线通信单元恢复后,利用有线和无线通信单元,将定位基站的位置坐标以及标识卡信息发送至液压支架控制器网络。示例性的,数据存储模块9可为定位基站的自身数据存储器(ram)。
56.在现有的应用场景中,在对综采工作面的人员进行定位时,如图5所示,采用的方式为:在地面布置有定位引擎,一般是x86架构的pc机,提供定位算法服务。工业以太网交换机,用于和井下设备通信。井下配置有环网交换机,一般有多个,用于地面和井下的数据通信。读卡分站和人员车辆标识卡组成定位网络,读卡分站将标识卡的数据通过环网交换机上传到地面定位引擎,也可通过不同的算法,将定位数据在读卡分站上进行缓存,等网络恢复后,由定位引擎计算标识卡位置。其中读卡分站作为定位基站使用,不能移动位置,否则定位会产生偏差。通常在综采工作面应用时,将液压支架上安装固定基站,定位基站之间采用大功率wi-fi或者蓝牙无线通信,或者有线以太网通信。人员携带标识卡(标签),读卡分
站接收标识卡发送的射频信号,分站把其接收到的员工数据和检测到的时间一起,暂存于自身数据存储器(ram)中,待定位引擎主机巡检时,通过光缆传输接口传送至定位引擎数据库,再对数据进行判别、分析、处理,从而实现人员车辆定位、报警、考勤管理等各项功能。此时,定位基站在系统中的作用:1、作为定位参考基准点,定位基站前期会根据井下测绘地图结果,提前规划好基站位置,作为不再移动的定位基准点;2、定期发送uwb脉冲信号给人员、车辆标识卡,后者接收此信号,并将时间信息返回给定位基站;3、定位基站将标识卡时间信息上传给环网交换机,最终上传到井上定位引擎;4、定位引擎通过算法,计算出标识卡与定位基站之间的精确距离信息;5、由于基站位置固定,则通过此距离信息就可确定标识卡的位置。
57.相应的,传统的定位基站存在以下不足:1、定位基站在安装前期只能依靠人工测距,综采工作面环境复杂,人工测距难度较大;2、随着采煤进程的推进,定位基站会随着液压支架移动,但是现有定位系统中,定位基站(读卡分站)位置必须固定,一旦位置变化,会严重影响测量结果;3、定位基站功能单一,仅作为基站使用,增加了系统的复杂度;4、现场设备复杂度高。
58.有鉴于此,在本实用新型中,通过在定位基站上增加基站位置感知单元和行程传感器数据处理单元,可实现定位基站的自我位置感知以及对自身位置的动态调整,使位置测量更为精准;在有线和无线通信单元中兼容已有其他功能外,还加入zigbee,wifi等无线通信功能,以及常用的有线通信功能,并且有线和无线通信单元还可接入电液支架控制器系统,使综采工作面定位基站不再是单独为定位设置的独有网络,还可接入本安型无线遥控器,用于对现场液压支架进行无线控制,以及还可加入高亮led,实现与现有控制系统的功能共享,可实现对其他设备功能的兼容,减少系统复杂度;此外,还可在电源电路上增加主动和被动式两级电源瞬时保护电路,降低瞬时电流对现场供电系统的冲击。
59.通过本实用新型中的综采工作面定位基站,在进行综采工作面的人员定位时,可利用基站位置感知单元和行程传感器数据处理单元实时获取定位基站的移动信息,并根据移动信息修正定位基站的位置坐标;进一步的,可利用uwb信号处理单元检测人员所携带标识卡的标识卡信息;最后利用核心处理单元通过有线和无线通信单元,将定位基站的位置坐标以及标识卡信息发送至液压支架控制器网络,利用液压支架控制器网络实现对综采工作面的人员定位。通过本实用新型中的技术方案,定位基站可实现自我位置感知,以及对自身位置的调节,以向液压支架控制器网络实时发送定位基站的精准位置坐标,进而可确保依据定位基站的位置坐标对综采工作面内人员定位的准确性,保障深入其中的人员安全,杜绝设备伤人事故。此外,通过两级电源瞬时保护电路的设计,可降低瞬时电流对现场供电系统的冲击,以及通过兼具兼容其他设备功能,可丰富定位基站的功能,减少系统复杂度。
60.以上披露的所有文章和参考资料,包括专利申请和出版物,出于各种目的通过援引结合于此。描述组合的术语“基本由
…
构成”应该包括所确定的元件、成分、部件或步骤以及实质上没有影响该组合的基本新颖特征的其他元件、成分、部件或步骤。使用术语“包含”或“包括”来描述这里的元件、成分、部件或步骤的组合也想到了基本由这些元件、成分、部件或步骤构成的实施方式。这里通过使用术语“可以”,旨在说明“可以”包括的所描述的任何属性都是可选的。
61.多个元件、成分、部件或步骤能够由单个集成元件、成分、部件或步骤来提供。另选
地,单个集成元件、成分、部件或步骤可以被分成分离的多个元件、成分、部件或步骤。用来描述元件、成分、部件或步骤的公开“一”或“一个”并不说为了排除其他的元件、成分、部件或步骤。
62.应该理解,以上描述是为了进行图示说明而不是为了进行限制。通过阅读上述描述,在所提供的示例之外的许多实施例和许多应用对本领域技术人员来说都将是显而易见的。因此,本教导的范围不应该参照上述描述来确定,而是应该参照前述权利要求以及这些权利要求所拥有的等价物的全部范围来确定。出于全面之目的,所有文章和参考包括专利申请和公告的公开都通过参考结合在本文中。在前述权利要求中省略这里公开的主题的任何方面并不是为了放弃该主体内容,也不应该认为申请人没有将该主题考虑为所公开的实用新型主题的一部分。显然,本领域的技术人员可以对本实用新型进行各种改动和变型而不脱离本实用新型的精神和范围。这样,倘若本实用新型的这些修改和变型属于本实用新型权利要求及其等同技术的范围之内,则本实用新型也意图包含这些改动和变型在内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。