成品奶ph值自动检测系统
技术领域
1.本实用新型涉及ph值自动检测系统技术领域,具体为一种成品奶ph值自动检测系统。
背景技术:
2.在乳制品生产时,需要对产品进行ph值检测,以判断产品的品质是否符合标准。目前多采用人工检测的方式,劳动强度大且检测效率低,不利于生产线的全自动化作业。
技术实现要素:
3.针对上述存在的技术不足,本实用新型的目的是提供一种成品奶ph值自动检测系统,实现成品奶的ph值自动检测,降低人工检测的劳动强度,提高生产效率。
4.为实现上述目的,本实用新型采用如下技术方案:
5.一种成品奶ph值自动检测系统,包括料箱机器人和ph值检测装置,料箱机器人用于将成品奶搬运至ph值检测装置的输入端;
6.所述ph值检测装置包括支架、底座单元、抓取单元、检测单元、破袋切刀、卸料单元;支架横跨在底座单元的上方;
7.底座单元包括基座和设置在基座上的输送带,输送带用于将成品奶自基座的输入端输送至输出端;基座的输入端固定设置有读卡器,用于自动扫描成品奶进行读码;
8.所述抓取单元包括第一传动模组、第一竖板和取样手爪;第一传动模组设置在支架上端,第一竖板固定在第一传动模组上,取样手爪固定在第一竖板的底端,取样手爪用于抓取成品奶后通过第一传动模组的运动,将成品奶放在输送带上;
9.所述检测单元包括第二传动模组、第二竖板、安装板和控制器;第二传动模组设置在支架上端,第二竖板固定在第二传动模组上,安装板固定在第二竖板的底端面上且安装板的长度方向与输送带的输送方向相同;控制器固定在第二竖板上;安装板的一侧沿其长度方向等间隔固定设置有多个穿刺针,另一侧沿其长度方向等间隔固定设置有多个与穿刺针对应的ph检测电极,ph检测电极与控制器电连接;
10.破袋切刀配置有两个,相对设置在输送带的两侧并固定在基座上,用于对成品奶进行破袋;
11.所述卸料单元包括第三传动模组、第三竖板和夹爪;第三传动模组设置在支架上端,第三竖板固定在第三传动模组上;夹爪固定在第三竖板的底端面上,用于将破袋后的成品奶从输送带上取下放进基座输出端处设置的废料箱中。
12.优选地,所述基座的输入端一侧固定设置有缓存板,用于料箱机器人将筐装的成品奶放在缓存板上。
13.优选地,所述输送带在所述基座上并排设置有两条,分别用于输送盒装成品奶和瓶装成品奶;基座上设置有夹持旋盖工位。
14.优选地,还包括夹持旋盖装置,夹持旋盖装置对应夹持旋盖工位固定设置在所述
基座上;夹持旋盖装置包括夹瓶机构和旋盖机构;夹瓶机构包括伸缩方向垂直于输送带输送方向设置的夹持伸缩缸,夹持伸缩缸的缸体端固定安装在基座上、伸缩端设有与瓶装成品奶的瓶身尺寸配合的夹持卡头;旋盖机构包括固定安装在基座上的旋盖支撑架和安装在旋盖支撑架上的旋盖抓手,旋盖抓手对应夹持卡头合闭夹持状态时的夹持中心设置、且旋盖抓手至少通过可沿竖直上下方向移动的z坐标驱动总成和可绕z坐标轴旋转的c坐标驱动总成安装在旋盖支撑架上,旋盖抓手上设有多个沿周向方向均布设置的夹持卡爪、且夹持卡爪通过旋盖抓手径向方向伸缩设置的卡爪伸缩控制部件安装在旋盖抓手上。
15.优选地,所述基座上沿所述输送带的长度方向固定设置有废液回收盒;废液回收盒的底端面倾斜设置,且废液回收盒的底端面高度自输送带的输入端向输出端逐渐降低;废液回收盒的底端面上高度最低点处固定设置有排污管。
16.优选地,还包括举升式agv小车,所述废料箱设置在举升式agv小车上。
17.优选地,还包括移动轨道柜,用于存放成品奶。
18.本实用新型的设计,能够实现成品奶的ph值自动检测,降低了人工检测的劳动强度,提高生产效率;自动化程度高,可追溯性强,极大降低了人为因素对样品奶检测的干扰,特别适用于规模化生产。
附图说明
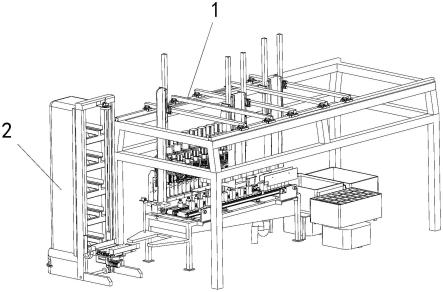
19.图1为本实用新型的结构示意图;
20.图2为本实用新型中ph值检测装置的结构示意图;
21.图3为本实用新型中破袋切刀的结构示意图;
22.图4为本实用新型中底座单元的结构示意图;
23.图5为本实用新型中抓取单元的结构示意图;
24.图6为本实用新型中检测单元的结构示意图;
25.图7为本实用新型中卸料单元的结构示意图;
26.图8为本实用新型中料箱机器人的结构示意图;
27.图9为本实用新型中旋盖机构的结构示意图;
28.图10为本实用新型中夹瓶机构的结构示意图;
29.图11为本实用新型中破袋切刀的结构示意图。
30.其中:
31.1、ph值检测装置;2、料箱机器人;3、底座单元;31、基座;32、缓存板;33、读卡器;34、输送带;35、排污管;36、废液回收盒;4、抓取单元;41、第一传动模组;42、第一竖板;43、取样手爪;5、支架;6、夹持旋盖装置;641、旋盖支撑架;642、夹持卡爪;643、卡爪伸缩控制部件;644、c坐标驱动总成;645、z坐标驱动总成;646、夹持卡头;647、夹瓶机构;648、夹持伸缩缸;7、检测单元;71、第二传动模组;72、控制器;73、安装板;74、穿刺针;75、ph检测电极;8、废料箱;9、举升式agv小车;10、卸料单元;1001、第三传动模组;1002、第三竖板;1003、夹爪;11、破袋切刀;12、移动轨道柜。
具体实施方式
32.下面结合附图对本实用新型作进一步说明。
33.如图1、图8所示,一种成品奶ph值自动检测系统,与现有的总控系统数据交互,包括料箱机器人2和ph值检测装置1,料箱机器人2为现有产品,用于将成品奶搬运至ph值检测装置1的输入端;
34.如图2所示,ph值检测装置1包括支架5、底座单元3、抓取单元4、检测单元7、破袋切刀11、卸料单元10;支架5横跨在底座单元3的上方;
35.如图4所示底座单元3包括基座31和设置在基座31上的输送带34,输送带34为现有产品,用于将成品奶自基座31的输入端输送至输出端;基座31的输入端固定设置有读卡器33,读卡器33为现有产品,用于自动扫描成品奶上的追溯码进行读码,将读取到的数据上传到总控系统中;
36.如图5所示,抓取单元4包括第一传动模组41、第一竖板42和取样手爪43;第一传动模组41设置在支架5上端,第一竖板42固定在第一传动模组41上,第一传动模组41取能够在水平方向、竖直方向内运动;取样手爪43固定在第一竖板42的底端,取样手爪43为现有产品,用于抓取成品奶后通过第一传动模组41的运动,将成品奶放在输送带34上;
37.如图6所示,检测单元7包括第二传动模组71、第二竖板、安装板73和控制器72;第二传动模组71设置在支架5上端,第二竖板固定在第二传动模组71上,安装板73固定在第二竖板的底端面上且安装板73的长度方向与输送带34的输送方向相同;控制器72固定在第二竖板上;安装板73的一侧沿其长度方向等间隔固定设置有多个穿刺针74,另一侧沿其长度方向等间隔固定设置有多个与穿刺针74对应的ph检测电极75,ph检测电极75与控制器72电连接;第二传动模组71取能够在水平方向、竖直方向内运动,带动安装板73进行运动,对输送带34上相对应的成品奶包装盒先通过穿刺针74进行钻孔,然后将ph检测电极75透过该钻孔插入到奶样中,读取到的ph值数据通过控制器72传输到总控系统中;
38.如图2、图3所示,破袋切刀11配置有两个,相对设置在输送带34的两侧并固定在基座31上,成品奶在检测过ph值后跟随输送带34继续向前运动,经过破袋切刀11后被破袋,便于将废弃的奶样从包装内释放出来;
39.如图7所示,卸料单元10包括第三传动模组1001、第三竖板1002和夹爪1003;夹爪1003包括两个夹板和气缸,气缸固定在其中一个夹板上,并且气缸的伸缩杆可活动的穿过该夹板并固定在另一个夹板上,气缸带动其伸缩杆回缩时,能够将成品奶包装夹在两个夹板之间;第三传动模组1001设置在支架5上端,第三竖板1002固定在第三传动模组1001上;夹爪1003固定在第三竖板1002的底端面上,用于将破袋后的成品奶从输送带34上取下放进基座31输出端处设置的废料箱8中,在夹爪1003夹住成品奶包装后,继续施加夹紧力,将包装内的残余奶样从包装内彻底释放出来。
40.进一步的,如图4所示,基座31的输入端一侧固定设置有缓存板32,用于料箱机器人2将筐装的成品奶放在缓存板32上,不占用料箱机器人2的工作时间。
41.进一步的,如图4所示,输送带34在基座31上并排设置有两条,分别用于输送盒装成品奶和瓶装成品奶;基座31上设置有夹持旋盖工位,用于对输送瓶装成品奶的输送带34位置进行成品奶的开盖,便于ph检测电极75插入到奶样中。
42.进一步的,如图2、图9、图10所示,还包括夹持旋盖装置6,夹持旋盖装置6对应夹持旋盖工位固定设置在基座31上;夹持旋盖装置6为现有设计,用于对瓶装成品奶进行夹持开盖包括夹瓶机构647和旋盖机构;夹瓶机构647包括伸缩方向垂直于输送带34输送方向设置
的夹持伸缩缸648,夹持伸缩缸648的缸体端固定安装在基座31上、伸缩端设有与瓶装成品奶的瓶身尺寸配合的夹持卡头646;旋盖机构包括固定安装在基座31上的旋盖支撑架641和安装在旋盖支撑架641上的旋盖抓手,旋盖抓手对应夹持卡头646合闭夹持状态时的夹持中心设置、且旋盖抓手至少通过可沿竖直上下方向移动的z坐标驱动总成645和可绕z坐标轴旋转的c坐标驱动总成644安装在旋盖支撑架641上,旋盖抓手上设有多个沿周向方向均布设置的夹持卡爪642、且夹持卡爪642通过旋盖抓手径向方向伸缩设置的卡爪伸缩控制部件643安装在旋盖抓手上;瓶装成品奶在输送带34上运动到夹持旋盖装置6对应的位置后,夹瓶机构647自该输送带34的两侧夹住瓶身,旋盖机构进行开盖,然后ph检测电极75插入瓶身的奶样中检测ph值数据。
43.进一步的,如图4所示,基座31上沿输送带34的长度方向固定设置有废液回收盒36,用于收集检测过ph值后废弃的奶液;废液回收盒36的底端面倾斜设置,且废液回收盒36的底端面高度自输送带34的输入端向输出端逐渐降低,便于奶液集中到一处;废液回收盒36的底端面上高度最低点处固定设置有排污管35,用于将奶液从废液回收盒36中释放出去。
44.进一步的,如图1所示,还包括举升式agv小车9,废料箱8设置在举升式agv小车9上,用于搬运废料箱8。
45.进一步的,如图11所示,还包括移动轨道柜,用于存放成品奶;料箱机器人2将成筐装的成品奶放在移动轨道柜12上,实现入库保存、巡检。
46.使用时,料箱机器人2将成筐装的成品奶运输到缓存板32上放置好,抓取单元4将单个成品奶抓取上来,读卡器33扫描成品奶包装上的信息并上传系统,成品奶被放置在输送带34上向前输送到预定位置,输送带34停止运动,检测单元7的穿刺针74先扎在成品奶的包装上,扎出来一个用于ph检测电极75穿入的孔,ph检测电极75检测奶样的ph值并将数据上传系统;检测单元7复位后输送带34继续运动,经过破袋切刀11后,成品奶的包装被划破,奶液流到废液收集盒中,卸料单元10抓取成品奶包装并压扁后丢进废料箱8中,举升式agv小车9将废料运到预定位置进行处理。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。