1.本发明属于雷达信号处理领域,特别涉及一种雷达识别中目标旋翼参数估计技术。
背景技术:
2.空中目标探测与识别作为遥感领域的研究热点,已成为现代国防和军事战场不可或缺的技术。对于如目标和无人机等具有旋翼的空中目标,旋翼的结构参数和运动参数是重要的识别依据。因此,对这些参数进行准确、完整的估计对于目标识别具有重要意义。
3.旋翼的重要参数桨叶长度、旋转周期和桨叶数是旋翼估计中最重要的参数。微多普勒特征反映了旋转的微运动特性,是一种广泛应用于转子参数估计的特征。文献“thayaparan t,abrol s,riseborough e,et al.analysis of radar micro-doppler signatures from experimental helicopter and human data[j].iet radar,sonar&navigation,2007,1(4):289-299.”,利用了小波变换与时频分析提取微多普勒特征并估计目标旋翼的运动参数,但并未涉及结构参数的估计。文献“choi i,kang k b,jung j h,et al.efficient estimation of the helicopter blade parameter by independent component analysis[j].ieee access,2020,8:156889-156899.”,利用独立成分分析估计了目标旋翼的结构参数和运动参数,然而该方法仅适用于特定范围的旋翼叶片数,且需要繁杂的叶片数奇偶判别流程。一般地,基于单一时频特征的旋翼参数估计方法难以突破上述限制,提取更多旋翼特征以弥补不足是必要的。
技术实现要素:
[0004]
为解决上述技术问题,本发明提出一种基于联合距离-时频特征的旋翼参数估计方法,能够准确估计出旋翼的叶片长度、旋转周期和叶片数。
[0005]
本发明采用的技术方案为:一种基于联合距离-时频特征的旋翼参数估计方法,包括:
[0006]
s1、旋翼基带回波信号建模;具体的:根据雷达坐标系中的目标几何构型,构造旋翼基带回波信号模型;
[0007]
s2、构造高分辨一维距离像矩阵;具体的:通过宽带雷达的回波信号进行脉冲压缩处理后取模获取雷达高分辨一维距离像;
[0008]
s3、旋翼参数建模;具体的:根据高分辨一维距离像矩阵信号参数估计得到旋翼的桨叶径向长度;
[0009]
s4、旋翼信号分离;具体的:首先在慢时域应用复经验模态分解去除主体回波,然后,采用恒虚警率检测算法将转子信号从噪声中分离出来;
[0010]
s5、桨叶长度估计;具体的:在慢时间域对高分辨一维距离像矩阵进行求和,得到快时间域投影信号,根据最近点和最远点的快时间域投影信号计算得到桨叶长度;
[0011]
s6、旋转周期估计;具体的:通过短时傅里叶变换,可以得到旋翼微多普勒分布,对
旋翼微多普勒分布进行快时间域投影得到投影信号,根据最大微多普勒频率点与最小微多普勒频率点投影信号,计算微多普勒频率峰值;根据微多普勒频率峰值得到旋转周期;
[0012]
s7、桨叶数估计;具体的:微多普勒频率峰值对应的时频域向量的频率即为叶片闪烁频率;根据叶片闪烁频率与旋转周期,得到桨叶数。
[0013]
本发明的有益效果:本发明首先根据旋翼运动特点构建参数模型,然后利用经验模态分解和恒虚警检测算法实现旋翼回波信号分离,最后通过快时域投影法进行距离-时间域和频率-时间域信号特征提取,联合高分辨一维距离像和微多普勒特征并结合参数模型,实现旋翼参数的准确估计。本发明的方法基于联合距离-时频特征准确估计出旋翼的叶片长度、旋转周期和叶片数,解决了现有方法中叶片范围限制和奇偶判别的问题,为进一步的目标识别奠定了良好的基础。
附图说明
[0014]
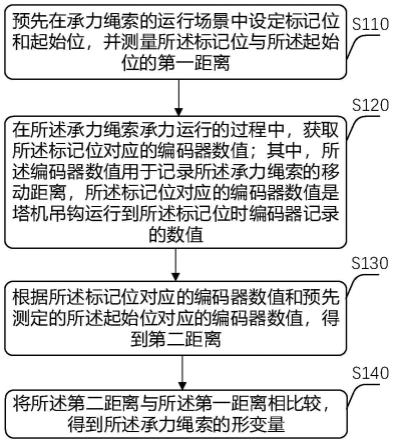
图1为本发明方法的流程图。
[0015]
图2为本发明具体实施方式采用的雷达目标几何构型。
[0016]
图3为本发明具体实施方式采用的距离-时间域快时间投影示意图
[0017]
图4为本发明具体实施方式采用的频率-时间域快时间投影示意图。
[0018]
图5为本发明具体实施方式得到的不同信噪比下旋翼参数估计误差。
具体实施方式
[0019]
为便于本领域技术人员理解本发明的技术内容,下面结合附图对本发明内容进一步阐释。
[0020]
本发明主要采用仿真实验的方法进行验证,所有步骤、结论都在windows10操作系统平台上通过matlab 2021a验证正确。为便于本领域人员理解本发明的技术内容,下面结合附图表对本发明内容进一步阐述。
[0021]
如图1所示,本发明的方法包括以下步骤:
[0022]
s1.旋翼基带回波信号建模。根据如图2所示的雷达目标几何构型,构造旋翼基带回波信号模型sr(tf,ts)为:
[0023][0024]
其中,tf为快时间,ts为慢时间,c表示光速,s(t)为雷达基带发射信号,σ
i,k
、φ
i,k
(ts)和r
i,k
(ts)分别表示第k个桨叶中第i个散射点的散射电场的振幅、微多普勒相位和径向距离。φ
i,k
(ts)和r
i,k
(ts)可具体表示为:
[0025][0026][0027]
其中,λ是雷达发射信号的波长,r为目标到雷达的距离,θ为俯仰角,ω为旋翼角速度,为初相,n为旋翼桨叶数,l
i,k
为第k个桨叶中第i个散射点的旋转半径。雷达系统参数
如表1所示。
[0028]
表1宽带雷达参数表
[0029]
参数符号数值载频f10ghz发射信号带宽b300mhz观察时间ts0.15s脉冲采样频率prf40khz俯仰角θ45
°
目标距离r2.3km
[0030]
s2构造高分辨一维距离像矩阵。雷达高分辨一维距离像是通过宽带雷达的回波信号进行脉冲压缩处理后取模获取,其中包含了丰富的目标结构特征。利用匹配滤波器s
*
(-t)与公式(1)在快时间域卷积,得到脉冲压缩后的旋翼信号矩阵sr(tf,ts):
[0031][0032]
公式(4)取模可得到旋翼高分辨一维距离像矩阵|sr(tf,ts)|。
[0033]
s3.旋翼参数建模。旋翼的桨叶径向长度可由|sr(tf,ts)|信号参数估计,给定目标俯仰角θ后,桨叶实际长度建模为:
[0034][0035]
对式(4)进行时频分析提取旋翼旋转引起的瞬时微多普勒频移。第k个叶片叶尖散射点的微多普勒频移fk(ts)为:
[0036][0037]
其中,i
t
为叶尖散射点,为l叶片长度,tr为旋转周期。由于旋翼为完全对称结构,每个尖端散射点引起的微多普勒时频特征相同。由式(6)可知,旋转周期的估计为:
[0038][0039]
其中,是由尖端散射点引起的最大微多普勒频率。瞬时微多普勒频率的峰值点也称为闪烁,闪光周期可表示为:
[0040][0041]
显然,一个n叶片旋翼在一个旋转周期中有n次叶片闪烁。因此,叶片的数量可表示为:
[0042]
[0043]
其中,round(
·
)是一个将元素近似到最近整数的函数。
[0044]
s4.旋翼信号分离。在雷达观测时间内,目标径向距离变化很小,因此目标主体的微多普勒频率几乎为零,而旋翼的旋转将产生更明显的频移。基于此,本发明首先在慢时域应用复经验模态分解去除主体回波。然后,采用恒虚警率检测算法将转子信号从噪声中分离出来。
[0045]
s5.桨叶长度估计。利用如图3所示的距离-时间域快时间投影法,在慢时间域对高分辨一维距离像矩阵进行求和,得到快时间域投影信号由于旋翼在距离雷达最近和最远时的径向速度最小,相应地,在这两处散射点的停留时间也最长,对应投影处为局部峰值点。局部峰值的索引向量可表示为:
[0046][0047]
其中,p=[p1,p2,
…
,pm],findpeaks(
·
)表示返回局部峰值索引的函数。p1和pm分别代表最近点和最远点的下标索引。对应的快时间向量为tf=[tf(p1),tf(p2),
…
,tf(pm)]。叶片的径向长度可表示为:
[0048][0049]
叶片实际长度可由公式(5)得到。
[0050]
s6.旋转周期估计。通过短时傅里叶变换,可以得到旋翼微多普勒分布tf(f,ts)。同样地,对tf(f,ts)进行快时间域投影的到投影信号频率-时间域快时间投影具体实施示意图如图4所示。由于叶片在最大微多普勒频率点处具有最大的雷达截面积,因此其对应投影处为局部峰值点。局部峰值点的索引向量表示为:
[0051][0052]
其中,p
′
=[p
′1,p
′2,
…
,p
′n],p
′1,p
′2,
…
,p
′n表示局部峰值点的下标索引。对应的微多普勒频率向量为f=[f(p
′1),f(p
′2),
…
,f(p
′n)]。微多普勒频率峰值可表示为:
[0053][0054]
然后,旋翼旋转周期可由公式(7)得到。
[0055]
s7.桨叶数估计。微多普勒频率峰值对应的时频域向量为由于的频率即为叶片闪烁频率,因此利用傅里叶变换可得到估计值叶片数的估计值最终由公式(9)得到。
[0056]
为验证本发明所提方法有效性,针对两种旋翼参数进行估计,执行s5、s6和s7后,输出旋翼参数估计结果。表2是30db信噪比下两种旋翼参数及估计结果对比,可以看出,在
30db噪声下,利用本发明方法可实现有效准确的参数估计。此外,图5是不同信噪比下旋翼1的参数估计误差,验证了方法的鲁棒性。
[0057]
表2 30db信噪比下旋翼参数估计结果
[0058][0059]
本领域的普通技术人员将会意识到,这里所述的实施例是为了帮助读者理解本发明的原理,应被理解为本发明的保护范围并不局限于这样的特别陈述和实施例。对于本领域的技术人员来说,本发明可以有各种更改和变化。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的权利要求范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。