一种基于动态滤波器的外差干涉测量信号前处理方法
(一)技术领域
1.本发明涉及光电信号处理领域,涉及一种外差干涉信号处理算法实时的前处理方法。
(二)
背景技术:
2.随着信息技术产业的发展,高端半导体的需求量越来越大。为了满足芯片制造的工艺和性能需求,光刻机工件台位移测量系统的测量精度必须达到亚纳米级。目前,超精密位移测量领域使用的测量工具主要有外差激光干涉仪和光栅干涉仪。
3.通过把测量信号和参考信号间的相位差进行细分,可以在不改变光路结构的基础上大大提高分辨力。通过硬件倍频的方式提高细分数,则会受限于芯片器件。目前工程中,为了进一步提高分辨力,多使用基于幅值分辨的相位细分方法。基于幅值分辨的相位细分方法有很多种,都需要先使用雪崩光电二极管将光强信号转换为电信号,经过调理后通过模拟数字转换器采样转换为数字信号再进行解算。
4.在解算的过程中,测量信号由于经过的光学器件多、光路较长、强度较低,经过转换后的测量信号信噪比比参考信号差很多。又由于测量速度需求的进一步提高,多普勒频移的变化范围变大,导致测量信号的频率变化范围变大。
5.使用一般的带通滤波器对信号进行前处理时,为了使所有的可能有用的信号通过,通带带宽非常宽,滤除噪音的能力就非常低,这就造成了相位解算的误差较大。同时,两路信号的幅值不同和激光器频差的不确定度也对后续的相位解算造成了一定困难。
6.由于频率与速度有对应关系,运动台的加速度有限,所以频率不会发生大范围的突变。
7.提出一种带有动态滤波器的亚纳米级外差干涉信号处理算法,其信号前处理模块的通带中心频率可以跟随主频变化,可以在通带带宽较窄的情况下让所有有用信号通过。可以在保证测量速度的同时,提高测量信号的信噪比从而提高相位细分的分辨力。
(三)
技术实现要素:
8.针对现有技术中的测量信号前处理手段中测量速度低、通带带宽较宽的缺陷,本发明的主要目的在于提供一种外差干涉信号前处理手段,能够在保证测量速度的同时、降低通带带宽从而提高测量信号信噪比、提高测量精度。
9.本发明的目的是这样实现的:
10.一种基于动态滤波器的外差干涉测量信号前处理方法。其特征是:它由直接数字式频率合成器1、90度相移器2、乘法器3、4、9、10和14、低通滤波器5和6、微分器7和8、加法器11、系数计算模块12、窗函数模块13、延时模块15、卷积器16组成。所述方法中直接数字式频率合成器1产生两路固定频率的信号,一路经过90度相移器2,一路不经过相移器,形成两路正交的信号。两路正交的信号分别与测量信号通过乘法器3、4相乘得到一个拥有高频和低频的混频信号,后分别经过低通滤波器5和6,滤掉混频信号中的高频信号,再经过微分器7
和8,之后经过微分器7的一路信号与另一路经过低通滤波器6而未经过微分器8的信号通过乘法器9,经过微分器8的一路信号与另一路经过低通滤波器5而未通过微分器7的信号通过乘法器10。通过乘法器9和10交叉相乘之后两路信号通过加法器11相加得到测量信号的频率信息。测量信号的频率信息通过系数计算模块12后再与窗函数模块13生成的窗函数通过乘法器14相乘得到滤波器系数。测量信号经过延时模块15与滤波器系数通过卷积器16卷积得到改善后的测量信号。
11.外差干涉测量信号输出的信号为正弦信号,可以用式(7)所示的表达式表示:fm=msin[2π(fm δf)t](7)
[0012]
其中m为测量信号幅值,fm为外差干涉所用的双频激光的频差,δf为测量目标移动导致的多普勒频移。由于外差干涉测量中对测量速度的要求越来越高,所以δf的变化范围增大。fm的频率变化范围也因此变的很大。当使用传统的带通滤波器对测量信号进行调理时,为了使所有可能有用的信号通过滤波器,设计滤波器时必须将滤波器的通带范围设计的较大,很大程度上丧失了滤波器滤除噪声的功能。导致后续对外差干涉测量信号解算时误差较大,分辨力较低。
[0013]
所以,提出一种基于动态滤波器的外差干涉测量信号前处理方法。可以在保证测量速度的同时,提高测量信号的信噪比从而提高相位细分的分辨力。
[0014]
测量信号首先进入实时测频模块,与直接数字式频率合成器产生的固定频率的一路经过90
°
相移器和一路未经过相移器的两路信号相乘,形成混频信号。其中低频部分为测量信号与直接数字式频率合成器产生信号的频率之差,高频部分为测量信号与直接数字式频率合成器产生信号的频率之和。
[0015]
在经过低通滤波器后,高频部分被滤除,被保留的信号如式(8)和(9)所示:fm×
sin
=msin[2π(f
m-f δf)t](8)fm×
cos
=mcos[2π(f
m-f δf)t](9)
[0016]
测量如图2所示的微分器,先经过17和18两级d触发器延时,延时后的信号与未延时的信号通过减法器19相减得到微分。微分前的信号与微分后的信号交叉相乘后,得到的信号如(10)和(11)所示:fm×
sin
×f′m×
cos
=m2[2π(f
m-f δf)t]sin2[2π(f
m-f δf)t](10)fm×
cos
×f′m×
sin
=m2[2π(f
m-f δf)t]cos2[2π(f
m-f δf)t](11)
[0017]
设定f与fm相等,在经过加法器相加后,结果如式(12)所示:fm×
cos
×f′m×
sin
fm×
cos
×f′m×
sin
=m2[2π(δf)t](13)
[0018]
从公式中可以看出,实时测频模块的输出结果仅与测量信号与直接数字式频率合成器产生信号的频差有关。该实时测频模块可以输出测量信号的频率信息。并且通过流水线设计可以保证在每个采样周期都能够输出一个准确的频率信息。
[0019]
当滤波器通带带宽d固定时,通过(13)(14)可以计算出滤波器的低截止频率和高截止频率。截止频率。
[0019]
可以通过式(15)计算出n阶的通带为f
l
~fh的滤波器系数。
[0020]
通过与窗函数相乘的方法可以降低滤波器的通带纹波、降低滤波器的过渡带带宽和增大滤波器的阻带衰减。
[0021]
通过这种方式可以保证一个较高的频率通过范围,以保证测量速度。同时又保持了滤波器的窄通带,对信号噪声的抑制效果好。
(四)附图说明
[0022]
图1是一种基于动态滤波器的外差干涉测量信号前处理方法。由直接数字频率合成器1、90度相移器2、乘法器3、4、9、10和14、低通滤波器5和6、微分器7和8、加法器11、系数计算模块12、窗函数模块13、延时模块15、卷积器16组成。
[0023]
图2是微分器结构示意图。由d触发器17和18、减法器19组成。
[0024]
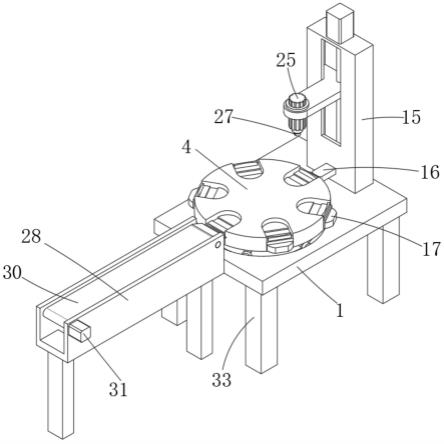
图3是一种基于动态滤波器的外差干涉测量信号前处理方法的实施例。
[0025]
图4是滤波后进行4~36mhz的扫频的信号。
[0026]
图5是测量信号经过动态滤波器前的频谱。
[0027]
图6是测量信号经过动态滤波器后的频谱。
(五)具体实施方式
[0028]
下面结合具体的实施例来进一步阐述本发明。
[0029]
图3给出了一种基于动态滤波器的外差干涉测量信号前处理方法的实施例。它由直接数字频率合成器1、90度相移器2、乘法器3、4、9、10和14、低通滤波器5和6、微分器7和8、加法器11、系数计算模块12、窗函数模块13、延时模块15和18、卷积器16、带通滤波器17、相位解算模块18、相位解算模块19组成。所述方法中直接数字式频率合成器1产生两路固定频率的信号,一路经过90度相移器2,一路不经过相移器,形成两路正交的信号。两路正交的信号分别与测量信号通过乘法器3、4相乘,后分别经过低通滤波器5和6再经过微分器7和8,得到的两路信号与未经过微分器的两路信号通过乘法器9和10交叉相乘。得到的两路信号通过加法器11相加得到测量信号的频率信息。测量信号的频率信息通过系数计算模块12后再与窗函数模块13生成的窗函数通过乘法器14相乘得到滤波器系数。测量信号经过延时模块15与滤波器系数通过卷积器16卷积得到输出信号。参考信号则经过带通滤波器17抑制噪声和延时器18保证与测量信号在采样时间上的同步。参考信号和测量信号经过相位解算模块19的解算被解算为相位信号。
[0030]
基于窗函数的可变系数滤波器在滤波器系数变化的过程中,保证信号的相位和幅值都不发生突变。对滤波后的信号进行4~36mhz的扫频,结果如图4所示,滤波后的信号没有产生相位和幅值的突变。在fpga中采集过滤波器前后的测量信号,分别计算测量信号经过滤波器前和经过滤波器后的信噪比,结果如图4、5所示,测量信号的信噪比从原来的10.34db上升到了36.20db。实验证明:该方法可以在测量信号频率变化范围大的情况下,保持较窄的通带带宽,提高信号的信噪比,且档位更换时不发生相位和幅值的突变。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。