1.本发明属于雷达对抗领域,特别涉及一种机载雷达工作模式识别技术。
背景技术:
2.机载雷达空对空工作模式主要有边搜索边测距(rws)、边搜索边跟踪(tws)、搜索加跟踪(tas)、单目标跟踪(stt)、速度搜索(vs)等。根据信号样式划分,各模式又有不同的子模式,对应于不同的战术任务和威胁等级。在空战中如何快速准确地识别雷达的工作模式,评估其威胁程度,已成为精确干扰的前提。因此,机载雷达工作模式识别在电子对抗中具有重要意义。
3.雷达工作模式识别是指通过侦察系统侦察得到的参数对当前雷达所处的工作模式和其信号样式进行识别。目前针对机载雷达工作模式识别的研究大多数都是基于脉冲数据特征,包括脉冲序列的载频(rf)、脉宽(pw)、重频(prf)、相参处理间隔(cpi)、脉冲幅度(pa)、数据率(dr)等。主要依据是同一工作模式上述参数基本保持固定,故可以通过分析区分工作模式。
4.文献“q.yang,j.gu and p.wei,recognition of operation modes of airborne fire control radar using amplitude rearrangement.journal of xidian university,vol.48,pp.42-48,2021.”分析了所截获雷达信号的pa时序特征,提出了一种基于盲识别的幅度重排算法,准确地识别了tas和stt模式,无需任何先验知识。但是该方法无法有效识别同为搜索状态的工作模式,例如rws和vs模式。
5.文献“w.wang and y.wang,a parameter-optimized slstsvm method for working modes recognition of airborne fire control radar.2020ieee 4th information technology,networking,electronic and automation control conference(itnec),chongqing,2020,vol.1,pp.948-953.”分析了雷达信号的多维度特征,提出了一种基于改进的最小二乘半监督支持向量机(sls-tsvm)的识别框架,但其不明确的边界判断可能导致不正确的分类。
6.文献“x.hui,b.wu,p.li,c.hou,and z.wang,highly contaminated work mode identification of phased array radar using deep learning method.2020ieee international geoscience and remote sensing symposium(igarss),2020,pp.2759-2762.”利用平滑度差异、背光信息和脉冲重复频率变化规律等特征,通过深度学习方法,识别了机载相控阵雷达的七种常见工作模式,但其深度网络结构太简单,无法识别具有复杂波形组合的多种工作模式。
7.如上所述,大量研究都集中在分类器结构的设计上,弱化了原始信号的重要基本特征以及脉冲串的序贯信息,然而这些却是识别参数提取的关键,也是实现工作模式识别的前提。而且现有方法很少考虑噪声以及重叠参数对工作模式识别性能的影响,导致在实际战场环境中的识别性能不够理想。
技术实现要素:
8.为解决上述技术问题,本发明提出一种基于多特征融合的机载雷达工作模式识别方法,融合原始信号脉内时序特点与脉间参数变化规律,采用“字-短语”分层结构,完成工作模式的时序表征建模,建立脉冲流级深度识别框架,自动提取细微高级特征,在注意力机制下实现对具有重叠参数且受噪声污染的机载雷达工作模式识别。
9.本发明采用的技术方案为:一种基于多特征融合的机载雷达工作模式识别方法,包括:
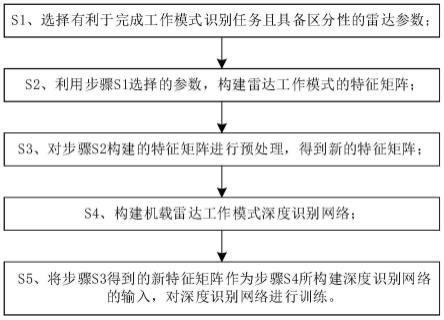
10.s1、选择有利于完成工作模式识别任务且具备区分性的雷达参数;
11.s2、根据步骤s2选择的雷达参数,构建雷达工作模式的特征矩阵;
12.s3、采用主成分分析方法对步骤s2构建的特征矩阵进行预处理,融合得到新的特征矩阵;
13.s4、构建机载雷达工作模式深度识别网络;
14.s5、将步骤s3得到的新的特征矩阵作为步骤s4所构建的深度识别网络的输入,对深度识别网络进行训练;
15.s6、根据训练完成的深度识别网络进行机载雷达工作模式识别。
16.本发明的有益效果:本发明的一种基于多特征融合深度网络的机载雷达工作模式识别方法,选择有利于完成工作模式识别任务且具备区分性的雷达参数,融合原始信号脉内时序特点与脉间参数变化规律,采用“字-短语”分层结构,完成工作模式的时序表征建模;引入脉冲流级深度识别框架,设计嵌入式注意力软阈值化模块,构建机载雷达工作模式深度识别网络,自动提取高级细节特征,消除与任务无关的噪声信息;在参数交叠和噪声污染情况下,实现机载雷达工作模式准确识别。
附图说明
17.图1为本发明实施例提供的方案流程图;
18.图2为本发明实施例提供的主干网络convnet的结构图;
19.图3为本发明实施例提供的嵌入式rs模块的结构图;
20.图4为本发明实施例提供的注意力机制的结构图;
21.图5为本发明实施例提供的多特征融合深度网络的整体架构图;
22.图6为本发明实施例提供的识别准确率随信噪比变化曲线;
23.图7为本发明实施例提供的信噪比为0db时的归一化混淆矩阵。
具体实施方式
24.为便于本领域技术人员理解本发明的技术内容,首先对以下术语进行解释,然后结合附图对本发明内容进一步阐释。
25.术语:多特征融合
26.多特征融合指的是在给定不同属性的特征时,利用特征之间的互补性,融合特征之间的优点,进而提高模型的性能。
27.附图1为本发明的方案流程图,包括:
28.s1、分析侦察系统侦收的信号参数对工作模式识别的作用,选择有利于完成工作
模式识别任务且具备区分性的雷达参数,具体为:
29.步骤s1中侦察系统可以侦收原始雷达信号及其脉冲描述字(pulse description word,pdw)参数,pdw和脉内调制(intra-pulse modulation,ipm)都是描述雷达特性的常见参数。在pdw参数中,载频(radio frequency,rf)影响探测距离,脉宽(pulse width,pw)决定距离分辨率,脉冲重复间隔(pulse repetition interval,pri)决定最大无模糊距离,脉冲幅度(pulse amplitude,pa)反映天线扫描特性,而到达方向(direction of arrival,doa)受接收机和雷达的相对位置影响较大;ipm反映雷达体制与抗干扰性能。为了尽可能地保留原始雷达数据的特征,直接选择中频采样信号(intermediate-frequency sampling signal,iss)而不选择ipm。于是,本发明实施例选择rf、pw、pri、pa和iss作为工作模式识别的关键参数。
30.s2、利用步骤s1选择的参数对雷达工作模式进行建模,完成特征矩阵构建,具体为:
31.步骤s2中,由于现代战场环境下的大量任务要求,各种工作模式的参数相互重叠,因此用瞬时雷达字来区分雷达工作模式并不可行。对于实际的雷达系统,为了在回波信号处理过程中获得较高的相干处理增益,在波束驻留期间要发射一定数量的填充脉冲和相干脉冲串,这些脉冲与原始脉冲的pdw参数基本相同,即形成一个相干处理间隔(coherent processing interval,cpi)。
32.根据雷达信号多层级模型,雷达字即有限数目雷达脉冲的固定排列,是最基本单元;雷达短语即有限个雷达字的固定排列,雷达短语反映了雷达的工作模式和任务。将一组cpi作为雷达字,则多组顺序cpi就是雷达短语,对应着某一工作模式。用w=[w1,w2,
…
,wn]
t
表示雷达字,其中wi表示步骤s1中侦察得到的雷达信号cpi参数。若某一雷达工作模式下的一个多组顺序cpi中包含l个cpi组,则对应的雷达短语可以表示为p=[w1,w2,
…
,w
l
],其矩阵形式为:
[0033][0034]
其中,矩阵p的每一列代表一个雷达字对应的cpi参数,每一行代表多组顺序cpi内对应的某一个参数序列。n根据步骤s1所选择的雷达参数个数确定,本实施例中n=5。
[0035]
根据步骤s1选择的雷达pdw参数,本发明实施例将雷达字记为[pw,pri,rf,pa]
t
,由于各组cpi内的pdw参数相对稳定,雷达字中的参数表示同一组cpi内较稳定脉冲的平均值。为准确描述雷达特征,将原始雷达信号的脉内变化规律iss拼接在雷达字上,构成扩展雷达字erw=[pw,pri,rf,pa,iss]
t
。
[0036]
假设第i种工作模式的一个多组顺序cpi中包含l个cpi组,则此工作模式的扩展雷达短语可以表示为erpi=[erw1,erw2,
…
,erw
l
],用来表征第i种工作模式,将其表示为如下矩阵形式:
[0037][0038]
其中,表示模式i的第一个cpi内的平均pw值,表示模式i的第l个cpi内的平均pw值。对于模式i的iss特征,观察rp中pw和rf值的突变时刻,然后记录每个突变时刻的之前一个和之后一个雷达脉冲,并将这些脉冲融合为一个脉冲,记为erpi就是第i种工作模式的特征矩阵,这种描述方法可以反映雷达信号的时序变化。
[0039]
s3、利用主成分分析(principal component analysis,pca)方法对步骤s2构建的特征矩阵进行预处理,融合得到新的特征矩阵,具体为:
[0040]
通常一个cpi包含成百上千个脉冲,中重频(medium pulse repetition frequency,mprf)一般使用一组(多个)prf值,为了记录一个工作模式的全部信息则需要成千上万个脉冲,这会导致数据量太大而不满足实时性要求。因此,利用pca方法对步骤s2构建的特征矩阵进行预处理,缩减特征维度,为深度识别网络的训练提供便利。
[0041]
s4、构建机载雷达工作模式深度识别网络,具体为:
[0042]
为区分具有重叠参数范围的工作模式,引入深度学习框架,提取雷达脉冲数据的时序规律和高维特征。卷积网络(convolutional network,convnet)可以提取鲁棒的高级特征,通过学习大量的样本获得更全面的特征表示。引入的残差收缩(residua-and-shrinkage,rs)模块中包含一个可自适应调整阈值的网络,并能够消除噪声相关特征。将rs模块嵌入到convnet中,可以自动获取各特征图的重要性。最后,通过结合深层特征与浅层特征,完成参数交叠的机载雷达工作模式识别任务,即使在低信噪比下也能够取得较好的识别效果。具体包括:
[0043]
s41、构建深度识别主干网络convnet,包括3个卷积(convolutional,conv)层、1个批正则归一化(batch normalized,bn)层、1个relu激活函数、1个全局平均池化(global average pooling,gap)层、1个softmax多分类器;卷积层的卷积核数目分别为n1,n2,n3,相应的卷积核尺寸为k1
×
k2,k3
×
k4,k5
×
k6,步长s=1。convnet结构如附图2所示。
[0044]
s42、构建rs模块,自适应调整阈值并消除与噪声相关的特征。rs模块由残差模块、注意力机制、软阈值化三部分组成;一个残差模块包括2个bn层、2个conv层和1个跨层恒等连接,bn和conv之间有relu;卷积层的卷积核数目分别为n4,n5,相应的卷积核尺寸为k7
×
k8,k9
×
k10,步长为s1,s2。rs模块的结构如附图3所示,残差模块避免了网络深度增加引起的梯度消失问题,进而提升网络性能。
[0045]
rs模块中的注意力机制如附图4所示,这个专门设计的小型网络可以自适应地学习阈值。首先通过gap将特征图x的绝对值变换为一维向量;然后将该一维向量通过一个由2个fc、1个bn和1个relu组成的全连接网络,从而获得自适应系数γ;最后利用sigmoid激活函数将γ映射到(0,1)的范围:
[0046]
[0047]
其中z是全连接网络的输出。经过一步scaling的操作,将系数γ与|x|的均值相乘得到阈值:
[0048][0049]
其中|x|是输入x的绝对值(absolute,abs),是|x|的平均值(mean)。
[0050]
软阈值化作为一种常见的降噪方法,它可以将接近零的特征变换为零,同时保留为正或为负的特征。软阈值化函数的表达式为:
[0051][0052]
其中x和y分别为输入和输出;软阈值化函数的梯度为0或1,有利于防止梯度爆炸或梯度消失。
[0053]
s43、为了自适应调整阈值并自动提取区分度高的特征,本发明实施例将rs模块嵌入到主干网络convnet中,rs模块被串联在convnet中的第二个卷积层后面,整个残差收缩卷积网络(residual-and-shrinkage convolutional network,rs-convnet)架构如附图5所示。卷积层可以大大减少可训练的网络参数,从而降低过拟合的可能性,并且更容易在测试集数据上获得更高的识别性能。此外,bn层将特征规范化为固定分布,再将具有固定分布的特征重新调整为所需分布,且这一所需分布是通过网络训练学习到的。
[0054]
s5、对步骤s4所构建深度识别网络进行训练,具体为:将步骤s3得到的新特征矩阵输入到步骤s4所构建深度识别网络中进行前向传播,计算代价函数值;利用基于梯度下降的后向传播算法更新深度识别网络参数;不断迭代进行前后向传播,直至代价函数收敛。
[0055]
最后本发明还包括:对训练完成的网络进行识别性能测试,具体为:考虑具有不同信号样式的典型工作模式,本发明实施例仿真产生了五种工作模式(rws,tws,tas,stt,vs),包括12种波形样式。每种波形的训练数据包括1000个样本,信噪比(signal-to-noise ratio,snr)以5db为增量在-10db到20db中取值,总计84000个训练样本。根据机载雷达空对空模式的典型波形参数,射频设置为9600-9650mhz,其他参数设置如表1所示。以rws模式为例,hrws表示高重频rws波形,mrws表示中重频rws波形,lrws表示低重频rws波形,hmrws表示中高重频交替rws波形,其他工作模式的信号波形命名规则类似,b代表信号带宽。从统计特性角度上观察,这些工作模式的参数范围存在交叠。此外,测试数据也是以5db信噪比为步进在-10db到20db中取值,各波形在每个snr下有100个测试样本。rs-convnet的结构参数设置为:n1=n2=n4=n5=16,n3=8,k1
×
k2=k7
×
k8=k9
×
k10=2
×
4,k3
×
k4=k5
×
k6=1
×
4,s1=2,s2=1。
[0056]
为验证本发明的可行性与鲁棒性,分别使用本发明所提模型rs-convnet、移除rs模块的模型convnet、用se模块代替rs模块的模型se-convnet,完成工作模式识别仿真,实验结果如图6所示。本发明实施例在低snr区域比convnet和se-convnet具有更好的识别性能,因为rs模块中的注意力机制可以自动给予重要特征以更多的权重,同时能够消除与噪声相关的信息,然而se模块未完全抑制与任务无关的特征,从而导致部分错误分类。当snr=0db时,本发明实施例的识别准确率可达99%,而传统方法一般在83%左右。本发明实施例在0db信噪比下的混淆矩阵如图7,可以看出本发明对12种机载雷达工作模式几乎完全正
确识别。
[0057]
为说明rs模块在低snr区域内对识别效果的贡献,本发明实施例对比了嵌入一个rs模块的模型rs-convnet以及嵌入两个rs模块的模型rs2-convnet,实验结果如表2所示。可以看出,识别准确率随着rs模块数量的增加而提高,因为rs模块可以消除与噪声相关的特征,rs模块的级联结构不仅深化了网络架构,而且有利于提取与任务相关的重要特征,从而达到了更明显的降噪效果。实验结果表明,在参数范围重叠、信噪比恶化的情况下,本发明在机载雷达工作模式识别方面具有优越的性能。
[0058]
表1工作模式波形参数设置
[0059]
工作模式pw(us)pri(us)pab(mhz)hrws3-55-2020-9010-30mrws0.2-527-8015-905-30hmrws0.5-55-6010-905-50htws2-55-2030-1005-20mtws0.1-530-10020-1005-20hmtws0.5-55-6030-1105-20htas2-55-2040-11010-30mtas1-545-10035-1205-30hmtas0.5-55-8530-11010-50hstt0.1-55-20110-1305-50mstt0.2-540-100100-1305-40vs3-55-2015-8010-50
[0060]
表2识别准确率与rs模块数量的关系
[0061][0062]
本领域的普通技术人员将会意识到,这里所述的实施例是为了帮助读者理解本发明的原理,应被理解为本发明的保护范围并不局限于这样的特别陈述和实施例。对于本领域的技术人员来说,本发明可以有各种更改和变化。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的权利要求范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
