1.本发明公开了一种基于融合元启发式算法的三维空间机器人路径规划方法,属于自主机器人路径规划技术领域。
背景技术:
2.机器人路径规划技术具体是指根据一些优化准则(如最短路径、最小能耗、最快时间等),寻找一条从起点到终点安全可行的路径。三维空间路径规划技术被广泛用于空中自动化巡检、水下目标搜索、海底资源勘察等现代应用。常规的路径规划技术常利用启发式算法、仿生算法、群体智能等技术手段完成机器人的路径规划。
3.目前,常规的路径规划技术存在以下问题:
4.启发式算法、仿生算法等存在过早陷入局部最优、过早收敛等弊端,需要一种可以平衡算法勘探能力和开发能力的优化算法加强三维空间机器人路径规划技术的实践可行性。
技术实现要素:
5.为了弥补背景技术存在的问题,改进现有方案的不足。本发明提出一种基于融合元启发式算法的三维空间机器人路径规划方法。该方法面向三维空间搜索应用,其核心为融合元启发式算法。融合元启发式算法是常规灰狼优化算法的改进,常规的灰狼优化算法存在过早陷入局部最优的弊端,因此设计非线性收敛因子和自适应权重系数,平衡全局搜索和局部搜索,并融合到融合元启发式算法,通过设计迭代竞争机制,提高算法收敛速度,从而提高机器人路径规划的运作效率。
6.本发明的技术方案如下:
7.一种基于融合元启发式算法的三维空间机器人路径规划方法,面向三维空间搜索应用,在给定的三维空间中,机器人按如下步骤移动:
8.(1-1)、设置起点和终点;
9.(1-2)、参数化空间环境,包括障碍物位置、障碍物数目、障碍物状态、空间阻力;
10.(1-3)、以空间环境参数为输入,运行,融合元启发式算法的优化目标在于路径的质量和算法收敛速度,输出为一段路径;
11.(1-4)、判断该路径是否到达终点,如果未达终点则更新环境信息,再次运行融合元启发式算法继续叠加路径;如果已到达终点,便向机器人设置目前路径;
12.(1-5)、机器人按设置的路径移动。
13.步骤(1-3)、(1-4)步骤中使用的融合元启发式算法是对常规的灰狼优化算法进行改进,设计非线性收敛因子和自适应权重系数,平衡全局搜索和局部搜索,并融合到平衡优化算法,通过设计迭代竞争机制,提高算法收敛速度。
14.对常规的灰狼优化算法进行改进的方法如下:
15.采用以下灰狼优化算法中使用的术语:
16.(1)种群:在确定的搜索区域内参与优化的搜索个体总数目。
17.(2)搜索代理:在搜索区域内可移动的个体位置。
18.(3)狼α、β、σ:在每次迭代过程中最好的3个搜索代理。
19.(4)头狼α:在每次迭代过程中最好的搜索代理。
20.(5)收敛因子a:灰狼优化算法迭代过程中平衡算法勘探能力和开发能力的参数。
21.(6)离心距离:种群中每个搜索代理与历史最佳位置头狼α之间的空间距离。
22.(7)平衡池:每次迭代过程中最优的4个搜索代理及它们的算数平均值构成的候选解集。
23.常规的灰狼优化算法的工作原理为,狼的位置优化更新过程(即机器人的移动方位及距离)由每代种群中最好的三个解(即狼α、β、σ)指导完成,常规的灰狼优化算法中的收敛因子取值为从2到0线性减少。而在融合元启发式算法中,使用一种非线性收敛因子策略,在此策略中提出离心距离变化率的概念。可以从平均离心距离和最大离心距离计算出每个搜索代理当前离心距离的变化率。其中,离心距离是种群中搜索代理与历史最佳位置之间的空间距离。通过离心距离的变化来判断候选解的分布,并将收敛因子调整为动态变化和非线性衰减。离心距离变化率的引入使得算法可以更好地平衡全局搜索和局部搜索。离心距离变化率λ表示如下:
[0024][0025]
其中dist
max
表示种群n在d维空间中搜索最优解时,每个搜索代理的最大离心距离,其值为dist
ave
表示种群n在d维空间中搜索最优解时,每个搜索代理的平均离心距离,其值为搜索代理的平均离心距离,其值为是迭代历史过程中最好位置向量(即常规灰狼优化算法迭代过程的头狼位置向量),称为α的位置向量;是灰狼搜索代理i的d维位置向量。
[0026]
在收敛因子a的更新公式中加入λ动态调整其收敛速度,有效协调算法的全局搜索和局部搜索能力。改进的收敛因子a更新公式如下:
[0027][0028]
其中iter表示当前迭代次数,iter
max
表示算法最大迭代次数。
[0029]
常规的灰狼优化算法中,搜索代理的位置更新公式为α、β、σ指导下的所得位置的算法平均值,在融合元启发式算法中,使用一种自适应权重系数策略,可以根据种群在迭代过程中的总体收敛程度动态更新搜索代理的灰狼位置,从而有效地提高算法的优化性能。离心距离λ的变化率主要反映了搜索代理与α狼的接近程度。然而,实际环境的复杂性导致α狼不一定是全局最优解,也需要知道每个搜索代理与β狼和σ狼的距离。因此,每个搜索代理相对于α,β,σ的当前离心距离的变化率λj表示如下:
[0030][0031]
其中,j包括狼α、β、σ,dist
αmax
表示此时的搜索代理相对于α的最大离心距离,dist
βmax
表示此时的搜索代理相对于β的最大离心距离,dist
σmax
表示此时的搜索代理相对于σ的最大离心距离;dist
αave
表示此时的搜索代理相对于α狼的平均离心距离,dist
βave
表示此时的搜索代理相对于β狼的平均离心距离,dist
σave
表示此时的搜索代理相对于σ狼的平均离心距离。
[0032]
则根据每个搜索代理当前对狼α、β、σ的离心距离变化率λj设计以下自适应权重系数:
[0033][0034]
其中,ω1是对应于α的权重系数,ω2是对应于β的权重系数,ω3是对应于σ的权重系数,
[0035]
结合设计的自适应权重系数,得到新的搜索代理位置更新公式如下:
[0036][0037]
其中xi(iter 1)表示在下一次迭代的搜索代理位置,x
i,α
表示搜索代理i相对于α的距离,x
i,β
表示搜索代理i相对于β的距离,x
i,δ
表示搜索代理i相对于σ的距离。
[0038]
改进的灰狼优化算法融合到平衡优化算法的具体方法如下:
[0039]
常规的平衡优化算法是在每次迭代中选取四个最好的粒子解及它们的算数平均值作为候选解集放入到平衡池中,其他粒子根据平衡池中的优秀粒子进行优化更新。在融合元启发式算法中,首先,进行初始化,设置最大迭代次数iter
max
和种群大小n,且初始路径中搜索代理生成如下:
[0040][0041]
其中,x
up
、x
low
分别代表变量x的上下边界,即代表算法的搜索区域,rand
[0,1]
表示[0,1]的随机数。
[0042]
之后,确定平衡池c
eq,cool
(iter),即确定候选解集池,具体如下:
[0043][0044]
其中,c
ave
(iter)表示最优的四个搜索代理c
eqi
(iter),(i=1,2,3,4)的算术平均值,c
eqi
(iter),(i=1,2,3,4)表示当前迭代中最好的四个搜索代理。
[0045]
然后,加入自适应灰狼搜索阶段,基于平衡池中的优秀搜索代理指导其他搜索代理进行全局更新,具体如下:
[0046][0047]
其中,d
α
、d
β
、d
σ
分别表示基于α,β,σ的位置向量矩阵,x1、x2、x3分别表示α、β、σ指导下对应搜索代理的位置,x
eqα
(iter),x
eqβ
(iter),x
eqσ
(iter)分别表示当前迭代下α、β、σ的位置,x
eqi
(iter)表示第i个搜索代理在当前迭代次数下的位置。另外对应系数向量设置为:
[0048][0049]
其中,iter为当前迭代次数,ai和ci为系数向量,a为改进的非线性收敛因子,r1、r2为[0,1]中的随机向量。
[0050]
随后,为了加快算法收敛速度,设计竞争机制,具体如下:
[0051][0052]
其中,表示当前迭代中所得到的最优搜索代理,表示通过自适应灰狼搜索得到的搜索代理位置,c
eqi
(iter)表示第i个搜索代理位置,函数f表示对应搜索代理的适应度值,适应度值越小,所得搜索代理越优。
[0053]
此时新的平衡池更新为:
[0054][0055]
其中,表示迭代后新的最优的四个搜索代理的算术平均值,表示当前迭代后所得到的最好的四个搜索代理。
[0056]
最后,当迭代次数iter》1时,较好的解决方案由以下方式保留:
[0057]ceqi
(iter)=c
eqi
(iter-1),if f(c
eqi
(iter-1))《f(c
eqi
(iter))
ꢀꢀꢀꢀꢀꢀ
(12)
[0058]ceqi
(iter)表示当前迭代下第i个搜索代理,c
eqi
(iter-1)表示上一次迭代下第i个搜索代理,同理函数f表示对应搜索代理的适应度值。
[0059]
迭代过程中,每个搜索代理ci(iter)的位置更新如下:
[0060][0061]
其中,ci(iter)表示第i个搜索代理,来自平衡池中,γ是[0,1]区间内的
随机向量,其他参数具体如下:
[0062][0063]
其中r,r1,r2为[0,1]中的随机数,c
eq
(iter)来自于平衡池中,ci(iter)表示第i个搜索代理。sign(r-0.5)控制勘探方向,且正负概率相等。
[0064]
本发明的有益效果是:
[0065]
本发明的方法的核心为融合元启发式算法。融合元启发式算法是常规灰狼优化算法的改进,常规的灰狼优化算法存在过早陷入局部最优的弊端,因此设计非线性收敛因子和自适应权重系数,平衡全局搜索和局部搜索,并融合到平衡优化算法,通过设计迭代竞争机制,提高算法收敛速度,从而提高机器人路径规划的运作效率。
附图说明
[0066]
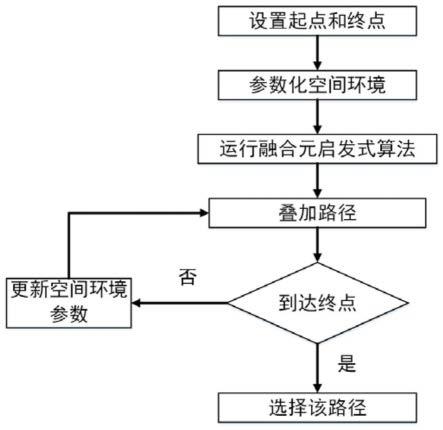
图1是基于融合元启发式算法的三维空间机器人路径规划流程;
[0067]
图2是海底探测应用示例;
[0068]
图3是自主水下滑翔机的路径图示例。
具体实施方式
[0069]
下面结合附图对本发明作进一步描述。以下实施例仅用于更加清楚地说明本发明的技术方案,而不能以此来限制本发明的保护范围。
[0070]
如图1所示,一种基于融合元启发式算法的三维空间机器人路径规划方法,面向三维空间搜索应用,在给定的三维空间中,机器人按如下步骤移动:
[0071]
(1-1)、设置起点和终点;
[0072]
(1-2)、参数化空间环境,包括障碍物位置、障碍物数目、障碍物状态、空间阻力;
[0073]
(1-3)、以空间环境参数为输入,运行,融合元启发式算法的优化目标在于路径的质量和算法收敛速度,输出为一段路径;
[0074]
(1-4)、判断该路径是否到达终点,如果未达终点则更新环境信息,再次运行融合元启发式算法继续叠加路径;如果已到达终点,便向机器人设置目前路径;
[0075]
(1-5)、机器人按设置的路径移动。
[0076]
步骤(1-3)、(1-4)步骤中使用的融合元启发式算法是对常规的灰狼优化算法进行改进,设计非线性收敛因子和自适应权重系数,平衡全局搜索和局部搜索,并融合到平衡优化算法,通过设计迭代竞争机制,提高算法收敛速度。
[0077]
对常规的灰狼优化算法进行改进的方法如下:
[0078]
采用以下灰狼优化算法中使用的术语:
[0079]
(8)种群:在确定的搜索区域内参与优化的搜索个体总数目。
[0080]
(9)搜索代理:在搜索区域内可移动的个体位置。
[0081]
(10)狼α、β、σ:在每次迭代过程中最好的3个搜索代理。
[0082]
(11)头狼α:在每次迭代过程中最好的搜索代理。
[0083]
(12)收敛因子a:灰狼优化算法迭代过程中平衡算法勘探能力和开发能力的参数。
[0084]
(13)离心距离:种群中每个搜索代理与历史最佳位置头狼α之间的空间距离。
[0085]
(14)平衡池:每次迭代过程中最优的4个搜索代理及它们的算数平均值构成的候选解集。
[0086]
常规的灰狼优化算法的工作原理为,狼的位置优化更新过程(即机器人的移动方位及距离)由每代种群中最好的三个解(即狼α、β、σ)指导完成,常规的灰狼优化算法中的收敛因子取值为从2到0线性减少。而在融合元启发式算法中,使用一种非线性收敛因子策略,在此策略中提出离心距离变化率的概念。可以从平均离心距离和最大离心距离计算出每个搜索代理当前离心距离的变化率。其中,离心距离是种群中搜索代理与历史最佳位置之间的空间距离。通过离心距离的变化来判断候选解的分布,并将收敛因子调整为动态变化和非线性衰减。离心距离变化率的引入使得算法可以更好地平衡全局搜索和局部搜索。离心距离变化率λ表示如下:
[0087][0088]
其中dist
max
表示种群n在d维空间中搜索最优解时,每个搜索代理的最大离心距离,其值为dist
ave
表示种群n在d维空间中搜索最优解时,每个搜索代理的平均离心距离,其值为搜索代理的平均离心距离,其值为是迭代历史过程中最好位置向量(即常规灰狼优化算法迭代过程的头狼位置向量),称为α的位置向量;是灰狼搜索代理i的d维位置向量。
[0089]
在收敛因子a的更新公式中加入λ动态调整其收敛速度,有效协调算法的全局搜索和局部搜索能力。改进的收敛因子a更新公式如下:
[0090][0091]
其中iter表示当前迭代次数,iter
max
表示算法最大迭代次数。
[0092]
常规的灰狼优化算法中,搜索代理的位置更新公式为α、β、σ指导下的所得位置的算法平均值,在融合元启发式算法中,使用一种自适应权重系数策略,可以根据种群在迭代过程中的总体收敛程度动态更新搜索代理的灰狼位置,从而有效地提高算法的优化性能。离心距离λ的变化率主要反映了搜索代理与α狼的接近程度。然而,实际环境的复杂性导致α狼不一定是全局最优解,也需要知道每个搜索代理与β狼和σ狼的距离。因此,每个搜索代理相对于α,β,σ的当前离心距离的变化率λj表示如下:
[0093]
[0094]
其中,j包括狼α、β、σ,dist
αmax
表示此时的搜索代理相对于α的最大离心距离,dist
βmax
表示此时的搜索代理相对于β的最大离心距离,dist
σmax
表示此时的搜索代理相对于σ的最大离心距离;dist
αave
表示此时的搜索代理相对于α狼的平均离心距离,dist
βave
表示此时的搜索代理相对于β狼的平均离心距离,dist
σave
表示此时的搜索代理相对于σ狼的平均离心距离。
[0095]
则根据每个搜索代理当前对狼α、β、σ的离心距离变化率λj设计以下自适应权重系数:
[0096][0097]
其中,ω1是对应于α的权重系数,ω2是对应于β的权重系数,ω3是对应于σ的权重系数,
[0098]
结合设计的自适应权重系数,得到新的搜索代理位置更新公式如下:
[0099][0100]
其中xi(iter 1)表示在下一次迭代的搜索代理位置,x
i,α
表示搜索代理i相对于α的距离,x
i,β
表示搜索代理i相对于β的距离,x
i,δ
表示搜索代理i相对于σ的距离。
[0101]
改进的灰狼优化算法融合到平衡优化算法的具体方法如下:
[0102]
常规的平衡优化算法是在每次迭代中选取四个最好的粒子解及它们的算数平均值作为候选解集放入到平衡池中,其他粒子根据平衡池中的优秀粒子进行优化更新。在融合元启发式算法中,首先,进行初始化,设置最大迭代次数iter
max
和种群大小n,且初始路径中搜索代理生成如下:
[0103][0104]
其中,x
up
、x
low
分别代表变量x的上下边界,即代表算法的搜索区域,rand
[0,1]
表示[0,1]的随机数。
[0105]
之后,确定平衡池c
eq,cool
(iter),即确定候选解集池,具体如下:
[0106][0107]
其中,c
ave
(iter)表示最优的四个搜索代理c
eqi
(iter),(i=1,2,3,4)的算术平均值,c
eqi
(iter),(i=1,2,3,4)表示当前迭代中最好的四个搜索代理。
[0108]
然后,加入自适应灰狼搜索阶段,基于平衡池中的优秀搜索代理指导其他搜索代理进行全局更新,具体如下:
[0109][0110]
其中,d
α
、d
β
、d
σ
分别表示基于α,β,σ的位置向量矩阵,x1、x2、x3分别表示α、β、σ指导下对应搜索代理的位置,x
eqα
(iter),x
eqβ
(iter),x
eqσ
(iter)分别表示当前迭代下α、β、σ的位置,x
eqi
(iter)表示第i个搜索代理在当前迭代次数下的位置。另外对应系数向量设置为:
[0111][0112]
其中,iter为当前迭代次数,ai和ci为系数向量,a为改进的非线性收敛因子,r1、r2为[0,1]中的随机向量。
[0113]
随后,为了加快算法收敛速度,设计竞争机制,具体如下:
[0114][0115]
其中,表示当前迭代中所得到的最优搜索代理,表示通过自适应灰狼搜索得到的搜索代理位置,c
eqi
(iter)表示第i个搜索代理位置,函数f表示对应搜索代理的适应度值,适应度值越小,所得搜索代理越优。
[0116]
此时新的平衡池更新为:
[0117][0118]
其中,表示迭代后新的最优的四个搜索代理的算术平均值,表示当前迭代后所得到的最好的四个搜索代理。
[0119]
最后,当迭代次数iter》1时,较好的解决方案由以下方式保留:
[0120]ceqi
(iter)=c
eqi
(iter-1),if f(c
eqi
(iter-1))《f(c
eqi
(iter))
ꢀꢀꢀ
(12)
[0121]ceqi
(iter)表示当前迭代下第i个搜索代理,c
eqi
(iter-1)表示上一次迭代下第i个搜索代理,同理函数f表示对应搜索代理的适应度值。
[0122]
迭代过程中,每个搜索代理ci(iter)的位置更新如下:
[0123][0124]
其中,ci(iter)表示第i个搜索代理,来自平衡池中,γ是[0,1]区间内的
随机向量,其他参数具体如下:
[0125][0126]
其中r,r1,r2为[0,1]中的随机数,c
eq
(iter)来自于平衡池中,ci(iter)表示第i个搜索代理。sign(r-0.5)控制勘探方向,且正负概率相等。
[0127]
实施例:
[0128]
基于自主水下滑翔机(aug:autonomous underwater glider)与自主水面航行器(asv:autonomous surface vehicle)的海底协同勘察应用,如图2。最初,多个aug和asv漂浮在海面上,等待基站的指示,基站可以是陆地站或船舶。当aug收到海底勘探命令时,沉入水下并通过基于融合元启发式算法的三维空间机器人路径规划方法进行海底勘察。
[0129]
海底地理信息已知,aug可以探测附近障碍物和洋流情况,从而判断移动路径。水面上的asv实时知道aug每个周期下交互点的情况,aug需上浮到交互平面,与asv进行信息交互,从而将海底收集到的信息发送给基站。期间,aug根据周边的水下环境信息,运行融合元启发式算法,进行水下路径规划,确定aug的全局路径,确定aug所有周期下的交互点,如图3。
[0130]
以下算法解释了基于融合元启发式算法的三维空间机器人路径规划方法在水下滑翔机路径规划整体运作过程。
[0131]
[0132][0133]
以上所述仅是本发明的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明技术原理的前提下,还可以做出若干改进和变形,这些改进和变形也应视为本发明的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。