一种obdii诊断的车载动态限载自检测方法及系统
技术领域
1.本发明属于汽车故障诊断技术领域,更具体来说,涉及一种obdii诊断的车载动态限载自检测方法及系统。
背景技术:
2.因高等级公路的日常维护与管理需要,目前车辆动态限载检测主要是由公路管理部门负责监管,主要方法是在高速路口收费处较少安装汽车限载质量检测设备。虽然可以在非停运的状态下可对车辆超载情况进行检测,国外的检测精度较高,在车速较低时能达到10%以内,置信度为95%。但是,对检测条件要求较高,需要安装专门检测设备,也不能实时检测。但是国内的动态限载检测技术仍存在较多问题,如测量精度不高,检测站过于庞大,检测设备造价较高,不便与施工和维护等。特别是对于物流管理企业,往往是发现超载后被公路管理部门责令进行整改,属于被动检测,现有的检测方法无法满足普通的物流管理企业的需求。
3.因此,急需一种低成本、高效率、高实时性检测是车辆限载检测方法。
技术实现要素:
4.本技术提供一种obdii诊断的车载动态限载自检测方法及系统,本技术通过实时采集车辆动力和加速状态数据,利用动力学原理建模,从而对车辆载重进行实时在线估计
5.第一方面,本技术提供了一种obdii诊断的车载动态限载自检测方法,包括以下步骤:
6.(1)分别检测在汽车空载和带载两种情况下,车辆起动加速时段的扭矩,并记录数据;
7.(2)验证检测数据的完整性,建立车载质量m的计算模型;
8.(3)根据计算模型建立方程组,求解扭矩系数和摩擦系数的估计值;
9.(4)对扭矩系数和摩擦系数的估计值进行误差检验;
10.(5)将合格的扭矩系数和摩擦系数的估计值带入计算模型,实时计算车辆运行中超载情况,并做出判断。
11.进一步的技术方案,所述的步骤(1)包括:
12.当汽车空载时,空载质量为m0,分别检测初段7-27km/h、中段27-47km/h和高段47-67km/h这三个加速时段发动机扭矩输出值作为第一组采样数据;检测间隔时间δt为1秒,同时记录加速时间长度;
13.当汽车带载时,空载质量为m1,分别检测7-27km/h、中段27-47km/h和高段47-67km/h这三个加速时段发动机扭矩输出值作为第二组采样数据;检测间隔时间δt为1秒,同时记录加速时间长度。
14.进一步的技术方案,所述的步骤(2)中数据完整性包括:加速起始时刻、加速终止时刻,加速时段的发动机扭矩采样值,加速时间段的检测次数n。验证每组数据完整性,完整
则进入下一步骤,否则,返回步骤(1)。
15.进一步的技术方案,所述的步骤(2)中,车载质量m的计算模型为:
[0016][0017]
其中,t0为加速初始时刻,v0为起始时刻t0时的初始速度,t1为加速终了时刻,v(t1)为加速终了时刻t1的速度,t(t)为t时刻的扭矩,k为扭矩系数,μ摩擦系数,g重力加速度,加速时长t=t1-t0;
[0018]
对时间离散化处理,车载质量m的计算模型为:
[0019][0020]
其中,n为加速过程中扭矩检测次数,δt转矩扭矩检测间隔时间,ti为扭矩检测时刻。
[0021]
进一步的技术方案,所述的步骤(3)的具体方法为:
[0022]
交叉使用步骤(1)中的空载和带载两组数据带入计算模型,即将两组数据种分别选择一个加速时段的采样数据带入质量计算模型构建一个二元一次方程组,则每个方程组有两个方程和两个未知数k和μ,共建立九个方程组,分别求解9组扭矩系数和摩擦系数的计算值:k1和μ1,k2和μ2,
…
,k9和μ9;
[0023]
取计算值的平均值为估计值,即得到扭矩系数的估计值和摩擦系数的估计值
[0024]
以加速初段方程组为例,求解扭矩系数和摩擦系数的估计值的方法为:
[0025][0026][0027]
其中,t
m0
(ti)为空载时初段加速的扭矩检测值,t
m1
(ti)为带载时初段加速的扭矩检测值,t
01
和t
00
为空载时加速初段起始时间和终了时间,t
11
和t
10
为带载时加速初段起始时间和终了时间。
[0028]
进一步的技术方案,所述的步骤(4)中对扭矩系数和摩擦系数的估计值进行误差检验方法为:将质量计算误差平方d2和阈值平方t2进行比较,若满足阈值条件:
[0029]
d2≤t2ꢀꢀ
(公式5)
[0030]
则扭矩系数和摩擦系数的估计值合格;
[0031]
其中,质量计算误差为无量纲标准参数,m1,m2,m3为将扭矩系数的估计值和摩擦系数的估计值和三组空载质量m0加速数据带入步骤2)中的计算模型中得到的质量计算值,m4,m5,m6为将扭矩系数的估计值和摩擦系数的估计值和三组带载质量m1加速数据带入步骤2)中的计算模型中得到的质量计算值,n=6为样本随机采集个数,满足n值不小于4的判断;
[0032]
采用参数的随机采样法进行阈值报警参数判断,根据传感器数据采集误差服从均值λ=0和标准方差σ=1的正态分布,参数的随机采样法中,阈值平方t2可以通过以下公式得出:
[0033][0034]
式中,α是未超过阈值的先验概率,σ为高斯分布的标准方差,参数维度m取值为1。
[0035]
进一步的技术方案,所述的步骤(5)的具体方法为:
[0036]
将误差检验合格的扭矩系数和摩擦系数带入计算模型,进行限载检测,计算实时带载数据,根据计算模型得出汽车载重m,并判断是否小于汽车限载m
max
值,如小于则继续检测,如大于则发出限载报警信号。
[0037]
第二方面,本技术公开了了一种obdii诊断的车载动态限载自检测系统,包括5g t-box下位机,通过obdii总线与车载ecu系统进行通信连接,获取车辆动力系统的状态信息数据,并将数据传输至限载检测模块;
[0038]
限载检测模块,建立车载质量m的计算模型,对车辆超载情况进行实时计算;报警模块,通过5g通信与限载检测模块进行通信,接收限载检测模块发出的车载超限报警信号。
[0039]
有益效果
[0040]
1、本发明提的obdii诊断的车载动态限载自检测方法,在车辆运行时就可以随时检测,无需去专门的定点检测设备处检测,成本低,不占空间,检测随时随地,检测效率高。
[0041]
2、本发明可以对车载载重的异常报警数据可以根据需要实时上传至物流企业车辆诊断管理平台,诊断管理平台也可以对车辆运行状态进行查询,从而可以实现物流企业对其下商用车的运行数据进行实时监控,不仅可以检测车辆限载,还可以检测车辆速度、位置等运行数据和发动机状态等诊断数据,大大提高物流企业的车辆运营管理水平
[0042]
3、本发明由通过实时采集车辆动力和加速状态数据,利用动力学原理建模,从而对车辆载重进行实时在线估计,检测效率高、数据准确度高。
[0043]
4、本发明采用随机采样法进行阈值报警参数判断,对数据比较敏感,有利于提高判断数据的准确性。本发明的计算模型中对质量不同的两组数据交叉使用,使得数据相关较弱,可提高解的准确性。
附图说明
[0044]
图1为本发明的一种obdii诊断的车载动态限载自检测方法流程图;
[0045]
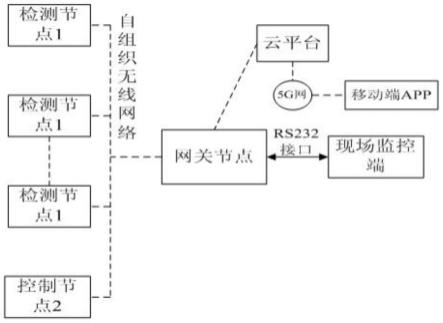
图2为本发明的一种obdii诊断的车载动态限载自检测系统的框架图。
具体实施方式
[0046]
下面结合附图和实施例,对本发明作进一步详细的说明。
[0047]
实施例1
[0048]
如图1所示,一种obdii诊断的车载动态限载自检测方法,包括以下步骤:
[0049]
(1)分别检测在汽车空载和带载两种情况下,车辆起动加速时段的扭矩,并记录数据;
[0050]
(2)验证检测数据的完整性,建立车载质量m的计算模型;
[0051]
(3)根据计算模型建立方程组,求解扭矩系数和摩擦系数的估计值;
[0052]
(4)对扭矩系数和摩擦系数的估计值进行误差检验;
[0053]
(5)将合格的扭矩系数和摩擦系数的估计值带入计算模型,实时计算车辆运行中超载情况,并做出判断
[0054]
所述的步骤(1)包括:
[0055]
当汽车空载时,空载质量为m0,分别检测初段7-27km/h、中段27-47km/h和高段47-67km/h这三个加速时段发动机扭矩输出值作为第一组采样数据;检测间隔时间δt为1秒,同时记录加速时间长度;
[0056]
当汽车带载时,空载质量为m1,分别检测7-27km/h、中段27-47km/h和高段47-67km/h这三个加速时段发动机扭矩输出值作为第二组采样数据;检测间隔时间δt为1秒,同时记录加速时间长度。
[0057]
所述的步骤(2)中数据完整性包括:加速起始时刻、加速终止时刻,加速时段的发动机扭矩采样值,加速时间段的检测次数n。验证每组数据完整性,完整则进入下一步骤,否则,返回步骤(1)。
[0058]
所述的步骤(2)中,车载质量m的计算模型为:
[0059][0060]
其中,t0为加速初始时刻,v0为起始时刻t0时的初始速度,t1为加速终了时刻,v(t1)为加速终了时刻t1的速度,t(t)为t时刻的扭矩,k为扭矩系数,μ摩擦系数,g重力加速度,加速时长t=t1-t0;
[0061]
对时间离散化处理,车载质量m的计算模型为:
[0062][0063]
其中,n为加速过程中扭矩检测次数,δt转矩扭矩检测间隔时间,ti为扭矩检测时刻。
[0064]
所述的步骤(3)的具体方法为:
[0065]
交叉使用步骤(1)中的空载和带载两组数据带入计算模型,即将两组数据种分别选择一个加速时段的采样数据带入质量计算模型构建一个二元一次方程组,则每个方程组有两个方程和两个未知数k和μ,共建立九个方程组,分别求解9组扭矩系数和摩擦系数的计算值:k1和μ1,k2和μ2,
…
,k9和μ9;
[0066]
取计算值的平均值为估计值,即得到扭矩系数的估计值和摩擦系数的估计值
[0067]
以加速初段方程组为例,求解扭矩系数和摩擦系数的估计值的方法为:
[0068][0069][0070]
其中,t
m0
(ti)为空载时初段加速的扭矩检测值,t
m1
(ti)为带载时初段加速的扭矩检测值,t
01
和t
00
为空载时加速初段起始时间和终了时间,t
11
和t
10
为带载时加速初段起始时间和终了时间。
[0071]
所述的步骤(4)中对扭矩系数和摩擦系数的估计值进行误差检验方法为:将质量计算误差平方d2和阈值平方t2进行比较,若满足阈值条件:
[0072]
d2≤t2ꢀꢀ
(公式5)
[0073]
则扭矩系数和摩擦系数的估计值合格;
[0074]
其中,质量计算误差为无量纲标准参数,m1,m2,m3为将扭矩系数的估计值和摩擦系数的估计值和三组空载质量m0加速数据带入步骤2)中的计算模型中得到的质量计算值,m4,m5,m6为将扭矩系数的估计值和摩擦系数的估计值和三组带载质量m1加速数据带入步骤2)中的计算模型中得到的质量计算值,n=6为样本随机采集个数,满足n值不小于4的判断;
[0075]
采用参数的随机采样法进行阈值报警参数判断,根据传感器数据采集误差服从均值λ=0和标准方差σ=1的正态分布,参数的随机采样法中,阈值平方t2可以通过以下公式得出:
[0076][0077]
式中,α是未超过阈值的先验概率,σ为高斯分布的标准方差,参数维度m取值为1。
[0078]
所述的步骤(5)的具体方法为:
[0079]
将误差检验合格的扭矩系数和摩擦系数带入计算模型,进行限载检测,计算实时带载数据,根据计算模型得出汽车载重m,并判断是否小于汽车限载m
max
值,如小于则继续检测,如大于则发出限载报警信号。
[0080]
如图2所示,一种obdii诊断的车载动态限载自检测系统,包括
[0081]
5g t-box下位机,通过obdii总线与车载ecu系统进行通信连接,获取车辆动力系统的状态信息数据,并将数据传输至限载检测模块;
[0082]
限载检测模块,建立车载质量m的计算模型,对车辆超载情况进行实时计算;
[0083]
报警模块,通过5g通信与限载检测模块进行通信,接收限载检测模块发出的车载超限报警信号。
[0084]
采用上述的车载动态限载自检测方法和检测系统,在车辆运行时就可以随时检测,无需去专门的定点检测设备处检测,检测效率高。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。