技术特征:
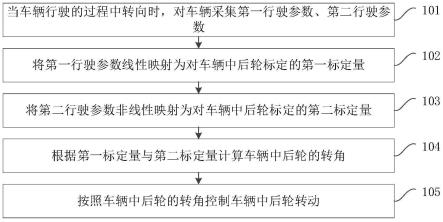
1.一种车辆的转向控制方法,其特征在于,包括:当车辆行驶的过程中转向时,对所述车辆采集第一行驶参数、第二行驶参数;将所述第一行驶参数线性映射为对所述车辆中后轮标定的第一标定量;将所述第二行驶参数非线性映射为对所述车辆中后轮标定的第二标定量;根据所述第一标定量与所述第二标定量计算所述车辆中后轮的转角;按照所述车辆中后轮的转角控制所述车辆中后轮转动。2.根据权利要求1所述的方法,其特征在于,所述当车辆行驶的过程中转向时,对所述车辆采集第一行驶参数、第二行驶参数,包括:在车辆行驶的过程中采集所述车辆的速度、方向盘的转角与方向盘的转速;若所述车辆的速度大于预设的第一阈值,所述方向盘的转角大于或等于预设的第二阈值,且所述方向盘的转速大于或等于预设的第三阈值,则对所述车辆采集第一行驶参数、第二行驶参数。3.根据权利要求1所述的方法,其特征在于,所述第一行驶参数包括所述车辆的速度;所述将所述第一行驶参数线性映射为对所述车辆中后轮标定的第一标定量,包括:加载线性映射函数,所述线性映射函数中的系数与所述车辆的物理参数相关;将所述车辆的速度代入所述线性映射函数中、映射为对所述车辆中后轮标定的第一标定量。4.根据权利要求3所述的方法,其特征在于,所述将所述车辆的速度代入所述线性映射函数中,得到对所述车辆中后轮标定的第一标定量,包括:针对所述车辆转向时的稳态响应,将对横摆的角速度添加增益设置为第一稳态目的;响应于所述第一稳态目的,将所述车辆的速度代入所述线性映射函数中,对所述车辆中后轮标定第一线性系数为第一标定量;或者,针对所述车辆转向时的稳态响应,将所述车辆的后轮与所述车辆的前轮反向转动、增加对横摆的角速度添加的增益设置为第二稳态目的;响应于所述第二稳态目的,将所述车辆的速度代入所述线性映射函数中,对所述车辆中后轮标定第二线性系数为第一标定量;或者,针对所述车辆转向时的稳态响应,将所述车辆的后轮与所述车辆的前轮同向转动、降低对横摆的角速度添加的增益设置为第三稳态目的;响应于所述第三稳态目的,将所述车辆的速度代入所述线性映射函数中,对所述车辆中后轮标定第三线性系数为第一标定量。5.根据权利要求4所述的方法,其特征在于,所述第一线性系数大于所述第三线性系数,所述第一线性系数小于所述第二线性系数。6.根据权利要求5所述的方法,其特征在于,所述第一线性系数等于1,所述第三线性系数大于0且小于1,所述第二线性系数大于1。7.根据权利要求1所述的方法,其特征在于,所述将所述第二行驶参数非线性映射为对所述车辆中后轮标定的第二标定量,包括:加载第一车辆模型与第二车辆模型,所述第一车辆模型用于描述所述车辆转向的瞬态
响应中后轮的理想转角,所述第二车辆模型用于描述所述车辆的实际状态;将所述第二行驶参数分别输入所述第一车辆模型和/或所述第二车辆模型中,并将所述第一车辆模型减去所述第二车辆模型,得到状态差;将所述状态差映射为对所述车辆中后轮标定的第二标定量。8.根据权利要求7所述的方法,其特征在于,所述将所述状态差映射为对所述车辆中后轮标定的第二标定量,包括:针对所述车辆转向时的瞬态响应,将对横摆添加基准阻尼设置为第一瞬态目的;响应于所述第一瞬态目的,将所述状态差映射为第一非线性系数,作为对所述车辆中后轮标定的第二标定量;或者,针对所述车辆转向时的瞬态响应,将增加对横摆添加基准阻尼设置为第二瞬态目的;响应于所述第二瞬态目的,将所述状态差映射为第二非线性系数,作为对所述车辆中后轮标定的第二标定量;或者,针对所述车辆转向时的瞬态响应,将降低对横摆添加基准阻尼设置为第三瞬态目的;响应于所述第三瞬态目的,将所述状态差映射为第三非线性系数,作为对所述车辆中后轮标定的第二标定量。9.根据权利要求8所述的方法,其特征在于,所述第一非线性系数大于所述第三非线性系数,所述第一非线性系数小于所述第二非线性系数。10.根据权利要求9所述的方法,其特征在于,所述第一非线性系数等于1,所述第三非线性系数大于0且小于1,所述第二非线性系数大于1。11.根据权利要求1-10中任一项所述的方法,其特征在于,所述根据所述第一标定量与所述第二标定量计算所述车辆中后轮的转角,包括:将所述第一标定量与所述第二标定量融合为目标标定量;获取所述车辆中前轮的转角;将所述车辆中前轮的转角乘以所述目标标定量,得到所述车辆中后轮的转角。12.根据权利要求11所述的方法,其特征在于,所述将所述第一标定量与所述第二标定量融合为目标标定量,包括:确定所述第一标定量与所述第二标定量符合融合条件,所述融合条件包括所述第一标定量与所述第二标定量归一化至同一标定体系中;响应于所述融合条件,将所述第一标定量与所述第二标定量相加,得到目标标定量。13.一种车辆的转向控制装置,其特征在于,包括:参数采集模块,用于当车辆行驶的过程中转向时,对所述车辆采集第一行驶参数、第二行驶参数;线性标定模块,用于将所述第一行驶参数线性映射为对所述车辆中后轮标定的第一标定量;非线性标定模块,用于将所述第二行驶参数非线性映射为对所述车辆中后轮标定的第二标定量;转角计算模块,用于根据所述第一标定量与所述第二标定量计算所述车辆中后轮的转
角;后轮转向控制模块,用于按照所述车辆中后轮的转角控制所述车辆中后轮转动。14.一种电子设备,其特征在于,所述电子设备包括:至少一个处理器;以及与所述至少一个处理器通信连接的存储器;其中,所述存储器存储有可被所述至少一个处理器执行的计算机程序,所述计算机程序被所述至少一个处理器执行,以使所述至少一个处理器能够执行权利要求1-12中任一项所述的车辆的转向控制方法。15.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质存储有计算机程序,所述计算机程序用于使处理器执行时实现权利要求1-12中任一项所述的车辆的转向控制方法。
技术总结
本发明公开了一种车辆的转向控制方法、装置、设备及存储介质,该方法包括:当车辆行驶的过程中转向时,对车辆采集第一行驶参数、第二行驶参数;将第一行驶参数线性映射为对车辆中后轮标定的第一标定量;将第二行驶参数非线性映射为对车辆中后轮标定的第二标定量;根据第一标定量与第二标定量计算车辆中后轮的转角;按照车辆中后轮的转角控制车辆中后轮转动。本实施例提出主动后轮转向的技术,在不改变原车辆参数的前提下提高后轮转向控制的精度,可调节质心侧偏角和横摆角速度等驾驶人员能明显感受到的横向动态指标,优化车辆横向瞬态响应,减轻驾驶员心理负担,改善驾乘人员的驾乘体验。体验。体验。
技术研发人员:高靖博 李春善 王宇 刘秋铮 徐丹琳 周添
受保护的技术使用者:中国第一汽车股份有限公司
技术研发日:2022.06.14
技术公布日:2022/9/2
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。