技术特征:
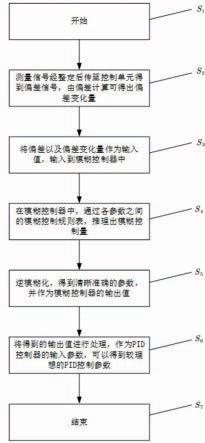
1.一种基于位置-滑转率调节的电液悬挂系统控制方法,其特征是:所述控制方法为安装在拖拉机上的滑转率传感器及位置传感器测出数据,通过位-滑综合系数得到实际犁耕深度值,将目标犁耕深度值与实际犁耕深度值进行比较,得到犁耕深度偏差值及深度变化量,将犁耕深度偏差值及深度变化量作为控制系统中模糊控制器的输入值,在模糊控制器中经模糊化,逆模糊化之后,输出值为pid的三个参数的修正量,再输入至控制系统中的pid控制器,处理之后进而对犁耕农具进行调节,拖拉机在犁耕作业时,犁耕作业情况发生变化,控制系统根据滑转率传感器及位置传感器实测的数据,通过滑转率调节或者位置调节,实现在位置-滑转率综合系数中的占比情况,以适应不同的犁耕作业环境,进而引起位置-滑转率综合系数a的变化,使得拖拉机在作业时达到所需的犁耕深度。2.根据权利要求1所述的基于位置-滑转率调节的电液悬挂系统控制方法,其特征是:所述位置-滑转率综合系数a为滑转率调节和位置调节在整个电液悬架系统中所占权重的大小,让拖拉机在犁耕工作时保持深度的稳定性以及负荷的稳定性,若位置-滑转率综合系数不在规定范围之内,此时的调节方式为位置调节或滑转率调节,若位置-滑转率综合度系数处于0~1之间时,此时为位置-滑转率综合调节,即滑转率调节和位置调节同时参与调节过程。3.根据权利要求1所述的基于位置-滑转率调节的电液悬挂系统控制方法,其特征是:所述目标犁耕深度是在拖拉机控制面板上设定的。4.根据权利要求1所述的基于位置-滑转率调节的电液悬挂系统控制方法,其特征是:所述犁耕深度偏差值e(t)为设定的目标犁耕深度值r(t)与实际测量出耕深值c(t)两者之差,即e(t)=r(t)-c(t),深度变化量为ec=de/dt,得到犁耕深度偏差值及深度变化量后经模糊化处理,建立犁耕深度偏差值及深度变化量的模糊集合,隶属度函数选取为三角形均匀分布型隶属度函数,将犁耕深度偏差值及深度变化量的模糊子集表示为:{nb,nm,ns,zo,ps,pm,pb},其可以表示为:负大,负中,负小,零,正小,正中,正大。5.根据权利要求1所述的基于位置-滑转率调节的电液悬挂系统控制方法,其特征是:所述模糊化方法为mamdani直接推理法,逆模糊化方法综合考虑采用重心法。6.根据权利要求5所述的基于位置-滑转率调节的电液悬挂系统控制方法,其特征是:所述重心法的具体公式为:其中:m为v
k
中论域元素的个数;v
o
为输出的精确值;v
k
为论域中的元素;u
v
(v
k
)为论域元素所对应的隶属度。7.根据权利要求1所述的基于位置-滑转率调节的电液悬挂系统控制方法,其特征是:所述pid三个参数的计算公式如下:所述pid三个参数的计算公式如下:所述pid三个参数的计算公式如下:
其中k
p
,k
i
及k
d
分别为pid的比例调节系数、积分调节系数和微分调节系数;及分别为初始时pid控制器的比例调节系数、积分调节系数和微分调节系数;δk
i
为积分调节系数的修正量;δk
d
为微分调节系数的修正量;δk
p
为比例调节系数的修正量。8.根据权利要求1所述的基于位置-滑转率调节的电液悬挂系统控制方法,其特征是:所述犁耕深度偏差值e(t)经过微分、比例及积分处理后,再经过线性组合得到控制量,其控制信号用如下的公式来表示:其中;t
i
为积分时间常数;m(t)为所述控制信号;e(t)为犁耕深度偏差值;k
p
为pid控制器比例调节系数;为犁耕深度偏差值对时间的导数;t
d
为微分时间常数。
技术总结
一种基于位置-滑转率调节的电液悬挂系统控制方法,本发明采用模糊PID控制方法,对拖拉机的犁耕作业机组进行调节,传感器收集的数据经过整定转换后得出实际数据,实际数据与设定目标值进行比较,得到目标值与实际值之间的偏差以及偏差变化量,将偏差以及偏差变化量作为模糊控制器的输入值,模糊控制器对PID三个控制参数进行动态调节,经过模糊控制器的处理,输出值为PID控制器的三个参数的修正量,输出值再经过PID控制器的处理,输出控制量等,本发明具有在拖拉机电液悬挂控制系统中具有动态响应快,调整速度迅速,稳态性能高,抗干扰能力强,超调量小等优势,适合于犁耕作业工况变化的工作系统。的工作系统。的工作系统。
技术研发人员:徐立友 鲁东振 席志强 刘孟楠 闫祥海 赵一荣 张帅 雷生辉 李妍颖 赵静慧
受保护的技术使用者:河南科技大学
技术研发日:2022.06.13
技术公布日:2022/9/2
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。