1.本发明涉及呼吸机领域,尤其是涉及呼吸机气道信号滤除风机干扰的方法。
背景技术:
2.为了提高呼吸机的治疗效果以及佩戴者的呼吸舒适性,市面上出现了自主触发模式的呼吸机,这种供气模式根据佩戴者的呼吸状态实时调整呼吸机的供气强度。为了获取佩戴者的呼吸状态,目前市面上产生了多种方案,如采集佩戴者呼吸集群的肌电信号、分析佩戴者胸廓的加速度信号、采集ppg(光电容积图)信号分析呼吸信号等,但上述方案都需要在呼吸机的气道以外添加传感器,这样就提高了生产成本、降低了系统可靠性,并且佩戴者还需要额外佩戴这些传感器,使得佩戴过程更加繁琐、使用过程有更强的束缚感,因此最理想的方案是仅使用呼吸机气道中的传感器就能获取佩戴者的呼吸状态。
3.但是在呼吸机使用过程中,佩戴者的自主呼吸会使呼吸机气道内的气体状态参数(如气压、流量等参数)产生变化,而跟随佩戴者呼吸动作而不断改变供气强度的呼吸机气源也会使呼吸机气道内的气体状态参数产生变化,因此实际上呼吸机气道内传感器采集到的信号是由佩戴者的自主呼吸动作和呼吸机的供气动作两部分叠加后的混合信号,该混合信号并不能直接反应佩戴着的呼吸状态;进一步地,如果直接使用该混合信号来控制呼吸机的供气强度,而不断变化的供气强度又反过来改变了该混合信号,这个闭环过程将掩盖掉佩戴者自主呼吸产生的气道信号,使得气道内传感器数据无法反映佩戴者的呼吸状态。
4.为了解决上述问题,如果只是使用风机气流强度输入-气道内气体参数输出计算呼吸机气路系统的传递函数,该传递函数总是不能准确地反映呼吸机气路系统特性;究其原因,向气道内增加供气强度与降低供气强度的过程并不是相同的物理过程。因此,简单地基于风机气流强度输入-气道内气体参数输出的传递函数不能有效地滤除风机在呼吸机气道内产生的干扰信号。
技术实现要素:
5.为了克服现有技术的不足,本发明的目的之一在于提供一种呼吸机气道信号滤除风机干扰的方法,滤除掉不断变化的气流控制元件输出强度在气道内产生的干扰,得到相对纯净的佩戴者呼吸动作信号。
6.本发明的目的之一采用如下技术方案实现:
7.一种呼吸机气道信号滤除风机干扰的方法,包括以下步骤:
8.搭建呼吸机气道系统:信号发生器输出控制信号使气流控制元件控制气道中的气流大小,传感器输出气道中的气流大小信号;
9.获取呼吸机气道系统的传递函数:阻塞呼吸机气道出口模拟佩戴者屏住呼吸的状态,信号发生器的控制信号发生阶跃,将整个阶跃过程中控制信号以及传感器的信号进行记录,以控制信号作为输入,以传感器的信号作为输出,计算呼吸机气道系统的传递函数;
10.采集呼吸机气道系统使用过程信号:在佩戴者使用呼吸机的过程中,采集信号发
生器的控制信号记为第五信号,采集传感器的信号记为第六信号;
11.计算佩戴者呼吸过程中气流控制元件在气道内产生的信号:将第五信号进行分离产生分离信号,采用呼吸机气道系统的传递函数计算分离信号控制下气流控制元件产生的不同的传感器信号,将不同的传感器信号相加得到佩戴者呼吸过程中气流控制元件在气道内产生的传感器信号;
12.计算佩戴者呼吸过程中滤除风机干扰的人体呼吸信号:将传感器的信号第六信号与佩戴者呼吸过程中气流控制元件在气道内产生的传感器信号作差,得到佩戴者呼吸过程中滤除风机干扰的人体呼吸信号。
13.进一步的,获取呼吸机气道系统的传递函数步骤具体为:信号发生器的控制信号从持续最小强度跃升至持续最大强度,将整个跃升过程中信号发生器的控制信号记为第一信号,将整个跃升过程中传感器的信号记为第二信号;信号发生器的控制信号从持续最大强度突降至最低强度,将整个突降过程中信号发生器的控制信号记为第三信号,将整个突降过程中传感器的信号记为第四信号;以第一信号作为输入,第二信号作为输出,计算呼吸机气道系统的上升传递函数gr;以第三信号作为输入,第四信号作为输出,计算呼吸机气道系统的下降传递函数gf。
14.进一步的,在获取呼吸机气道系统的传递函数步骤中,信号发生器的控制信号发生阶跃前,所述信号发生器向所述气流控制元件输出持续的最低气流强度信号,以使所述气道内的气流强度最低,并维持这种状态直到传感器的输出信号稳定。
15.进一步的,计算佩戴者呼吸过程中气流控制元件在气道内产生的信号具体为:将第五信号分离为只有上升的第七信号和只有下降的第八信号;使用上升传递函数gr计算气流控制元件在第七信号控制下产生的传感器信号第九信号;使用下降传递函数gf计算气流控制元件在第八信号控制下产生的传感器信号第十信号;将第九信号与第十信号相加得到佩戴者呼吸过程中气流控制元件在气道内产生的信号。
16.进一步的,在计算佩戴者呼吸过程中气流控制元件在气道内产生的信号过程中,分离第五信号的原则是:第五信号、第七信号以及第八信号的时间保持一致。
17.进一步的,第五信号、第七信号以及第八信号的时间保持一致具体为,第五信号的上升时间段内,第七信号的上升幅度与第五信号的上升幅度相同。
18.进一步的,第五信号、第七信号以及第八信号的时间保持一致具体为,第五信号的下降时间段内,第八信号的下降幅度与第五信号的下降幅度相同。
19.进一步的,在搭建呼吸机气道系统步骤中,气流控制元件为风机、比例阀、伺服阀中的任意一种。
20.进一步的,在搭建呼吸机气道系统步骤中,传感器为表压传感器、差压传感器、绝压传感器、流量传感器中的任意一种。
21.进一步的,在搭建呼吸机气道系统步骤中,气道为风机管路、呼吸管路、口鼻罩、全脸面罩中的任意一种。
22.相比现有技术,本发明呼吸机气道信号滤除风机干扰的方法通过获取呼吸机气道系统的传递函数、采集呼吸机气道系统使用过程信号、计算佩戴者呼吸过程中气流控制元件在气道内产生的信号以及计算佩戴者呼吸过程中滤除风机干扰的人体呼吸信号等步骤,滤除掉不断变化的气流控制元件输出强度在气道内产生的干扰,得到相对纯净的佩戴者呼
吸动作信号;只使用布置在呼吸机气道中的传感器就可以获取了相对纯净的佩戴者呼吸动作信号,佩戴者不需要佩戴额外的传感器来单独监测呼吸动作,降低了呼吸机的成本、提高了呼吸机的系统可靠性,并且提高了佩戴者使用呼吸机的舒适度;由于获取了相对纯净的佩戴者呼吸动作信号,呼吸机就可以更加紧密地跟随佩戴者的呼吸动作,使佩戴者有更好的呼吸体验。
附图说明
23.图1为本发明呼吸机气道信号滤除风机干扰的方法的系统图;
24.图2为获取呼吸机气道系统的传递函数的流程图;
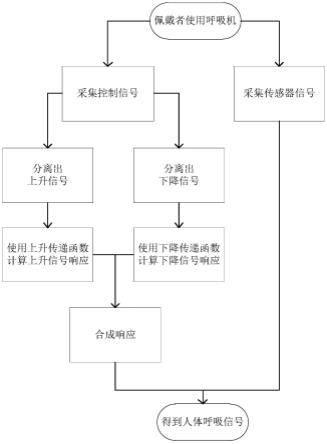
25.图3为滤除风机干扰的流程图;
26.图4为第一信号的示意图;
27.图5为第二信号的示意图;
28.图6为第三信号的示意图;
29.图7为第四信号的示意图;
30.图8为第五信号的示意图;
31.图9为第七信号的示意图;
32.图10为第八信号的示意图;
33.图11为第六信号的示意图;
34.图12为第九信号的示意图;
35.图13为第十信号的示意图;
36.图14为佩戴者呼吸过程中气流控制元件在气道内产生的传感器信号;
37.图15为佩戴者呼吸过程中滤除风机干扰的人体呼吸信号。
38.图中:10、气流控制元件;20、气道;30、佩戴者;40、信号发生器;50、传感器。
具体实施方式
39.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
40.需要说明的是,当组件被称为“固定于”另一个组件,它可以直接在另一个组件上或者也可以存在另一中间组件,通过中间组件固定。当一个组件被认为是“连接”另一个组件,它可以是直接连接到另一个组件或者可能同时存在另一中间组件。当一个组件被认为是“设置于”另一个组件,它可以是直接设置在另一个组件上或者可能同时存在另一中间组件。本文所使用的术语“垂直的”、“水平的”、“左”、“右”以及类似的表述只是为了说明的目的。
41.除非另有定义,本文所使用的所有的技术和科学术语与属于本发明的技术领域的技术人员通常理解的含义相同。本文中在本发明的说明书中所使用的术语只是为了描述具体的实施例的目的,不是旨在于限制本发明。本文所使用的术语“及/或”包括一个或多个相关的所列项目的任意的和所有的组合。
42.图1为本发明呼吸机气道信号滤除风机干扰的方法的系统图,呼吸机气道系统包括气流控制元件10、气道20、信号发生器40以及传感器50。
43.一种呼吸机气道信号滤除风机干扰的方法,包括以下步骤:
44.搭建呼吸机气道系统:信号发生器40输出控制信号使气流控制元件10控制气道20中的气流大小,传感器50输出气道20中的气流大小信号;
45.获取呼吸机气道系统的传递函数:阻塞呼吸机气道20的出口模拟佩戴者30屏住呼吸的状态,信号发生器40的控制信号发生阶跃,将整个阶跃过程中控制信号以及传感器50的信号进行记录,以控制信号作为输入,以传感器50的信号作为输出,计算呼吸机气道20系统的传递函数;
46.采集呼吸机气道系统使用过程信号:在佩戴者30使用呼吸机的过程中,采集信号发生器40的控制信号记为第五信号(如图8所示),采集传感器50的信号记为第六信号(如图11所示);
47.计算佩戴者30呼吸过程中气流控制元件10在气道20内产生的信号:将第五信号进行分离产生分离信号,采用呼吸机气道20系统的传递函数计算分离信号控制下气流控制元件10产生的不同的传感器50信号,将不同的传感器50信号相加得到佩戴者30呼吸过程中气流控制元件10在气道20内产生的传感器50信号;
48.计算佩戴者30呼吸过程中滤除风机干扰的人体呼吸信号:将传感器50的信号第六信号与佩戴者30呼吸过程中气流控制元件10在气道20内产生的传感器信号(如图14所示)作差,得到佩戴者30呼吸过程中滤除风机干扰的人体呼吸信号(如图15所示)。
49.请继续参阅图2,获取呼吸机气道系统的传递函数步骤具体为:信号发生器40向气流控制元件10输出持续的最低气流强度信号,以使气道20内的气流强度最低,并维持这种状态直到传感器50的输出信号稳定。信号发生器40的控制信号从持续最小强度跃升至持续最大强度,将整个跃升过程中信号发生器40的控制信号记为第一信号(如图4所示),将整个跃升过程中传感器50的信号记为第二信号(如图5所示);信号发生器40的控制信号从持续最大强度突降至最低强度,将整个突降过程中信号发生器40的控制信号记为第三信号(如图6所示),将整个突降过程中传感器50的信号记为第四信号(如图7所示);以第一信号作为输入,第二信号作为输出,计算呼吸机气道20系统的上升传递函数gr;以第三信号作为输入,第四信号作为输出,计算呼吸机气道20系统的下降传递函数gf。
50.获取呼吸机气道系统的传递函数步骤为预处理步骤,可以重复多次,以获取尽可能准确的传递函数。在确定了gr和gf就不必每次使用呼吸机时都重复预处理步骤。
51.请继续参阅图3,图3为滤除风机干扰的流程图。滤除风机干扰过程中,计算佩戴者30呼吸过程中气流控制元件10在气道20内产生的信号具体为:将第五信号分离为只有上升的第七信号(如图9所示)和只有下降的第八信号(如图10所示);使用上升传递函数gr计算气流控制元件10在第七信号控制下产生的传感器50信号第九信号(如图12所示);使用下降传递函数gf计算气流控制元件10在第八信号控制下产生的传感器50信号第十信号(如图13所示);将第九信号与第十信号相加得到佩戴者30呼吸过程中气流控制元件10在气道20内产生的信号(如图14所示)。在计算佩戴者30呼吸过程中气流控制元件10在气道20内产生的信号过程中,分离第五信号的原则是:第五信号、第七信号以及第八信号的时间保持一致。第五信号、第七信号以及第八信号的时间保持一致具体为:第五信号的上升时间段内,第七
信号的上升幅度与第五信号的上升幅度相同。第五信号的下降时间段内,第八信号的下降幅度与第五信号的下降幅度相同。
52.在搭建呼吸机气道系统步骤中,气流控制元件10为风机、比例阀、伺服阀中的任意一种。传感器50为表压传感器、差压传感器、绝压传感器、流量传感器中的任意一种。气道20为风机管路、呼吸管路、口鼻罩、全脸面罩中的任意一种。
53.本发明呼吸机气道信号滤除风机干扰的方法能够滤除掉不断变化的气流控制元件10输出强度在气道内产生的干扰,得到相对纯净的佩戴者30的呼吸动作信号;只使用布置在呼吸机气道20中的传感器50就可以获取了相对纯净的佩戴者30呼吸动作信号,佩戴者30不需要佩戴额外的传感器50来单独监测呼吸动作,降低了呼吸机的成本、提高了呼吸机的系统可靠性,并且提高了佩戴者30使用呼吸机的舒适度;由于获取了相对纯净的佩戴者30呼吸动作信号,呼吸机就可以更加紧密地跟随佩戴者30的呼吸动作,使佩戴者30有更好的呼吸体验。
54.以上实施例仅表达了本发明的几种实施方式,其描述较为具体和详细,但并不能因此而理解为对发明专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干变形和改进演变,都是依据本发明实质技术对以上实施例做的等同修饰与演变,这些都属于本发明的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。