1.本发明涉及雷达信号处理技术领域,尤其涉及一种非凸松弛原子范数空时动目标参数估计方法。
背景技术:
2.运动目标检测和参数估计是机载雷达的重要任务。空时自适应处理(space-time adaptive processing,stap)可以有效降低多普勒谱扩展的地杂波带来的不利影响,对于提高机载雷达的检测性能具有重要意义。在运动目标参数估计方面,传统方法主要包括最大似然方法和自适应单脉冲方法。最大似然方法需要对动目标参数进行二维搜索,其估计精度与搜索步长有关,运算量较大且估计性能有限。自适应单脉冲方法利用自适应波束形成技术,消除了杂波和噪声对参数估计的影响,然而当目标位于主瓣杂波区域时,自适应单脉冲比将严重失真,造成参数估计误差增大。虽然对单脉冲比施加约束可以在一定范围内改善单脉冲比曲线,但额外的约束条件会消耗系统自由度(degrees of freedom,dof),导致参数估计性能下降。
3.随着机载雷达信号处理方向的技术进步,稀疏恢复技术逐渐成为一项热门方法。基于该项技术的动目标参数估计利用目标回波的功率谱在空时平面上的稀疏特性,通过合适的稀疏恢复算法,实现对目标信号的精确重构,进而完成运动目标参数估计。目前基于稀疏恢复的动目标参数估计方法将目标参数空间对应的空时平面离散地划分为有限个网格点来构建稀疏恢复字典,当存在字典失配问题时,参数稀疏恢复性能下降。综上所述,如何降低字典失配对参数稀疏恢复性能的影响,成为了本领域技术人员亟待解决的技术问题。
技术实现要素:
4.本发明所要解决的技术问题是克服现有技术中存在的不足,提供一种非凸松弛原子范数空时动目标参数估计方法。
5.本发明是通过以下技术方案予以实现:
6.一种非凸松弛原子范数空时动目标参数估计方法,包括如下步骤:s1.利用参考距离单元数据估计杂波协方差矩阵r,估计值记作s2.利用子空间投影技术对待检测所述单元数据进行杂波抑制,抑制后的数据记作目标观测x;s3.采用ram方法对所述目标观测x进行稀疏恢复,通过多步迭代求解,得到目标信号子空间s4.使用矩阵束分解算法对所述目标信号子空间进行块toeplitz矩阵分解,提取目标信号的频率和s5.根据所述目标信号的频率和获取动目标的方位角和速度估计结果
7.根据上述技术方案,优选地,在步骤s2中,所述目标观测x的协方差矩阵r可以分解为:
[0008][0009]
其中,r是一个维度为mn
×
mn的低秩埃尔米特矩阵;i
mn
为mn
×
mn的单位矩阵,σ
n2
为噪声功率。
[0010]
根据上述技术方案,优选地,步骤s3包括:
[0011]
目标信号x
t
的加权原子范数表示为:
[0012][0013]
其中a
ω
为加权原子集合;
[0014][0015]
其中,ω(f)表示原子a(f)的权函数;
[0016]
所述目标信号x
t
的加权原子范数最小化问题可以转化为半正定规划问题,即:
[0017][0018]
其中,w为加权矩阵,s(t)为m
×
m的块toeplitz矩阵;
[0019]
定义目标信号x
t
的稀疏测度函数为:
[0020][0021]
其中,ε为稀疏正则化参数,当ε趋于正无穷时,所述稀疏测度函数表示的稀疏测度等价于原子范数,当ε趋于零时,所述稀疏测度等价于原子l0范数;
[0022]
根据目标回波的空时功率谱在角度-多普勒域的稀疏特性以及连续参数稀疏恢复和低秩矩阵恢复之间的关系,所述目标信号x
t
通过所述稀疏测度函数最小化估计获得,即:
[0023][0024]
目标信号x
t
及其子空间s(t)可以通过对上式的最优化问题进行迭代求解获得。
[0025]
根据上述技术方案,优选地,在步骤3中,所述s(t)为m
×
m的块toeplitz矩阵,表示为:
[0026][0027]
其中,ti(1-m≤i≤m-1)为n
×
n的toeplitz矩阵,即:
[0028][0029]
根据上述技术方案,优选地,在步骤3中,使用优化最小方法通过多步迭代来逐步逼近局部最优解,其中,设s(tj)表示第j次迭代的目标信号子空间估计值,则第j 1次迭代的最优化问题表示为:
[0030][0031]
根据上述技术方案,优选地,在步骤s5中,当目标相对于雷达做匀速运动时,归一化空间频率为:归一化多普勒频率为:其中,v
t
为目标相对于雷达的径向速度;θ
t
分别为目标的方位角和俯仰角。
[0032]
本发明的有益效果是:
[0033]
本发明针对参数稀疏恢复中的字典失配问题,提出了一种非凸松弛原子范数空时动目标参数估计方法,该方法利用目标回波在角度-多普勒域的稀疏特性,根据连续压缩感知和低秩矩阵恢复理论实现了运动目标方位角和速度的高精度、超分辨率估计,在不受到分辨率限制的同时,避免了稀疏恢复中的字典失配问题,有效提高了动目标参数估计性能。
附图说明
[0034]
图1为anm方法未受到分辨率限制时的参数估计结果。
[0035]
图2为anm方法受到分辨率限制时的参数估计结果。
[0036]
图3为anm方法的空时谱估计结果。
[0037]
图4为本发明方法的空时谱估计结果。
[0038]
图5为目标方位角估计性能随snr变化对比图。
[0039]
图6为目标速度估计性能随snr变化对比图。
[0040]
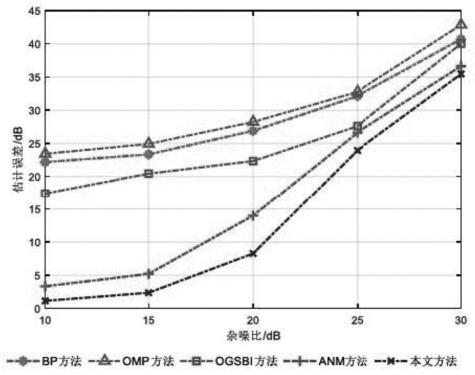
图7为不同杂噪比条件下这几种方法对于目标1的参数估计误差曲线。
[0041]
图8为不同杂噪比条件下这几种方法对于目标2的参数估计误差曲线。
具体实施方式
[0042]
为了使本技术领域的技术人员更好地理解本发明的技术方案,下面结合附图和最佳实施例对本发明作进一步的详细说明。基于发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于发明保护的范围。
[0043]
在发明的描述中,需要说明的是,术语“中心”、“上”、“下”、“左”、“右”、“竖直”、“水平”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对发明的限制。
[0044]
实施例1:本发明公开了一种非凸松弛原子范数空时动目标参数估计方法,包括如下步骤:s1.利用参考距离单元数据估计杂波协方差矩阵r,估计值记作s2.利用子空间投影技术对待检测所述单元数据进行杂波抑制,抑制后的数据记作目标观测x;s3.采用ram方法对所述目标观测x进行稀疏恢复,通过多步迭代求解,得到目标信号子空间s4.使用矩阵束分解算法对所述目标信号子空间进行块toeplitz矩阵分解,提取目标信号的频率和s5.根据所述目标信号的频率和获取动目标的方位角和速度估计结果
[0045]
根据上述实施例,优选地,在步骤s2中,目标信号子空间可以由其空时导向矢量张成,所述目标观测x的协方差矩阵r可以分解为:
[0046][0047]
其中,r是一个维度为mn
×
mn的低秩埃尔米特矩阵;i
mn
为mn
×
mn的单位矩阵,σ
n2
为噪声功率。
[0048]
根据上述实施例,优选地,步骤s3包括:
[0049]
连续目标参数空间对应的空时导向矢量的集合可以表示为原子集合a,即:
[0050][0051]
则目标信号x
t
的加权原子范数表示为:
[0052][0053]
其中a
ω
为加权原子集合;
[0054][0055]
其中,ω(f)表示原子a(f)的权函数,即ω(f)的值越大,其对应的原子a(f)被选择的优先级就越高;公式(3)的加权原子范数最小化问题可以转化为半正定规划问题,即:
[0056][0057]
其中,w为加权矩阵,s(t)为m
×
m的块toeplitz矩阵,表示为:
[0058][0059]
其中,ti(1-m≤i≤m-1)为n
×
n的toeplitz矩阵,即:
[0060][0061]
定义目标信号x
t
的稀疏测度函数为:
[0062][0063]
其中,ε为稀疏正则化参数,当ε趋于正无穷时,所述稀疏测度函数表示的稀疏测度等价于原子范数,当ε趋于零时,所述稀疏测度等价于原子l0范数;
[0064]
根据目标回波的空时功率谱在角度-多普勒域的稀疏特性以及连续参数稀疏恢复和低秩矩阵恢复之间的关系,所述目标信号x
t
通过所述稀疏测度函数最小化估计获得,即:
[0065][0066]
由于ln|s(t) εi
mn
|是一个严格凹函数,不能保证得到全局最优解,因此公式(9)中,目标信号x
t
及其子空间s(t)可以使用优化最小方法通过多步迭代来逐步逼近局部最优解。设s(tj)表示第j次迭代的目标信号子空间估计值,则第j 1次迭代的最优化问题表示
为:
[0067][0068]
令w=(1/mn)(s(tj) εi
mn
)-1
、ω(f)=[a(f)hwa(f)]-1/2
,则公式(10)等价于求解公式(5)的最优解。
[0069]
根据上述实施例,优选地,在步骤s5中,当目标相对于雷达做匀速运动时,归一化空间频率为:归一化多普勒频率为:其中,v
t
为目标相对于雷达的径向速度;θ
t
分别为目标的方位角和俯仰角。
[0070]
本发明技术原理如下:目标信号x
t
及其子空间s(t)可以通过对式(9)的最优化问题进行迭代求解获得,从以上的操作中可以看出,当第j次迭代中的权值越大,其对应的原子在j 1次迭代中被选择的可能性就会越高,而权值越小的原子在下次迭代中会被逐步削弱,最终收敛到特定的稀疏解,因而增强了恢复信号的稀疏度和分辨力。
[0071]
使用矩阵束分解算法对公式(9)获得的目标信号子空间进行块toeplitz矩阵分解,可以得到目标信号的归一化空间频率和归一化多普勒频率的估计值进而由公式(11)、(12)计算得到运动目标的方位角和速度的估计值
[0072]
实施例2:本发明还公开了一种非凸松弛原子范数空时动目标参数估计方法的表征实验,实验参数设置为如下:机载雷达采用阵元数为n=16的正侧视ula,脉冲重复频率fr=2 434.8hz,相干脉冲数m=16,雷达发射波长为λ=0.23m,ula阵元间距为半个波长,载机平台高度h=9 000m,载机速度v
p
=140m/s,输入信噪比snr=0db,杂噪比cnr=40db,使用64个参考单元数据估计杂波协方差矩阵,两个匀速运动目标处于待检测单元内,方位角分别为和目标相对于雷达的径向速度分别为v
t,1
=98.99m/s和v
t,2
=93.99m/s。仿真实验对比了本文方法、anm方法及ogsbi方法等三种off-grid方法,以及bp方法、omp方法等两种固定离散字典方法,ogsbi方法中最大迭代次数为2000,超参数误差最大值设置为1
×
10-3
,bp方法和omp方法中网格点数选取ns=nd=16,此时anm方法的分辨率为4/dof=0.016,参数估计均方根误差蒙特卡罗实验次数为500次。
[0073]
关于anm方法分辨率理论边界的分析如下:本文需进行空时动目标归一化多普勒频率与空间频率的二维估计,在理想无噪声情况下,通过anm方法对频率进行精确求解要求频率间隔至少为4/dof。因此,动目标二维频率的欧氏距离需满足:
[0074][0075]
其中,dof=m
×
n;f
s,t,1
和f
s,t,2
分别为目标1和目标2的空间频率;f
d,t,1
和f
d,t,2
分别为目标1和目标2的归一化多普勒频率;满足:
[0076][0077][0078]
其中,ψ
t,i
,i=1,2分别为两个动目标与雷达之间的空间锥角;v
t,i
,1=1,2分别为两个动目标相对于雷达的径向速度。
[0079]
实验一:比较不同方法对空间紧邻目标的估计性能。根据anm方法受到分辨率限制与否将目标的参数设置为以下两种情况:(1)当anm方法未受到分辨率限制时,设置两个目标的方位角分别为和目标相对于雷达的径向速度分别为v
t,1
=98.99m/s和v
t,2
=93.99m/s;(2)当anm方法受到分辨率限制时,设置两个目标的方位角分别为和目标相对于雷达的径向速度分别为v
t,1
=98.99m/s和v
t,2
=96.99m/s。
[0080]
图1-2对比了本文方法、anm方法、ogsbi方法、bp方法以及omp方法在信噪比snr=10db下的动目标参数估计结果。其中,图1为anm方法未受到分辨率限制时的参数估计结果,图2为anm方法受到分辨率限制时的参数估计结果。如图1-2中,*、
△
、
□
、 和
×
分别为bp方法、omp方法、ogsbi方法、anm方法和本文方法的估计结果,由图1可看出,bp方法和omp方法基于离散字典实现,其估计结果只能在划分好的网格点上,当目标参数真值不在字典网格点上时,存在字典失配问题,其参数估计结果误差较大,ogsbi方法补偿了字典失配误差,其参数估计精度高于bp方法和omp方法,然而模型近似引入的误差使得其参数估计精度较差。anm方法可以避免字典失配问题,在未受到分辨率限制时能够正确分辨出两个目标,且估计精度高于ogsbi方法,但本文方法的估计精度更高;如图2所示,当两个目标的参数空间相邻较近时,bp方法与omp方法由于字典网格的影响,均只能估计出一个目标,且具有较大的估计误差;anm方法由于受到其分辨率限制,同样不能分辨出两个目标;ogsbi方法虽然能够对这两个空间紧邻的动目标进行辨识,但其参数估计误差较大;而本文方法由于对原子范数进行了非凸松弛,突破了anm的分辨率限制,能够准确分辨两个参数空间紧邻目标,且参数估计精度高于ogsbi方法。
[0081]
当anm方法受到分辨率限制时,本文方法和anm方法的空时谱估计结果如图3-4所示。其中,图3为anm方法的空时谱估计结果,图4为本文方法的空时谱估计结果。从图3-4可以看出,anm方法在受到分辨率限制情况下的空时谱估计结果仅有一个谱峰,而本文方法能够准确估计两个参数空间紧邻动目标的空时谱谱峰,这和目标参数估计结果具有一致性。
[0082]
实验二:比较不同方法在不同信噪比条件下的参数估计性能。仿真参数适用实验1情况(1)中参数,即两个目标紧邻情况。图5-6为五种方法的估计性能随snr变化对比图。其中,图5为目标方位角估计性能随snr变化对比图,图6为目标速度估计性能随snr变化对比图。从仿真结果来看,图5-6进一步体现了本文方法相比anm方法、ogsbi方法、bp方法和omp方法在估计精度上的优势。bp方法和omp方法参数估计性能并没有随着信噪比的增大而提高,这是由于使用固定离散字典,字典网格间距限制了这两种方法的参数估计精度。ogsbi方法补偿了字典失配带来的估计误差,其参数估计性能优于bp方法和omp方法,但模型近似引入的误差限制了其估计性能的提升。而anm方法虽然没有固定离散字典网格间距带来的
估计精度限制,但由于凸松弛引入的分辨率限制,使得其估计性能未随信噪比提高而明显提升。而本文方法由于采用非凸松弛原子范数,没有分辨率限制,方位角和速度估计性能随信噪比提升不断提高,且更加接近对应的crb(cramer-rao bound)理论曲线,参数估计性能明显优于其他四种方法。
[0083]
实验三:比较不同方法在不同杂噪比(杂噪比越高,杂波干扰越强,目标淹没在杂波中,参数估计越困难)条件下的参数估计性能。仿真参数适用实验1情况(1)中参数,设置信噪比snr=0db,杂噪比cnr取值范围为10db至30db。图7-8分别为不同杂噪比条件下这几种方法对于目标1和目标2的参数估计误差曲线。从图7-8中可以看出,随着杂噪比的增加,bp方法、omp方法、ogsbi方法、anm方法与本文方法的估计性能均有所下降,但本文方法的估计性能仍然优于其他方法,特别是在低杂噪比为10db至20db时优势更加明显。
[0084]
本发明利用目标回波在角度-多普勒域的稀疏特性,根据连续压缩感知和低秩矩阵恢复理论实现了运动目标方位角和速度的高精度、超分辨率估计,在不受到分辨率限制的同时,避免了稀疏恢复中的字典失配问题,有效提高了动目标参数估计性能。除此之外,通过仿真实验结果表征,本发明方法相较于已有基于字典网格的稀疏恢复参数估计方法和原子范数估计方法,具有更高的参数估计精度和对空间紧邻目标的分辨能力。
[0085]
以上所述仅是本发明的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明原理的前提下,还可以做出若干改进和润饰,这些改进和润饰也应视为本发明的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。