1.本发明涉及车辆运行状态识别技术领域,具体而言,涉及一种基于轨迹信息的车辆移动特征识别方法。
背景技术:
2.随着社会经济发展,城市物流业得到了快速发展,信息技术的发展催生了大量的货运车辆gps轨迹数据,这些海量的车辆轨迹数据为数据分析师们提供了有效的数据支撑。现有技术中,针对车辆轨迹数据的研究主要有车辆轨迹聚类、轨迹异常点检测、轨迹分类等,其中,轨迹分类就是通过对轨迹数据的统计与分析不同轨迹间的时空特征,抽象出轨迹模型,以此作为分类器,对目标车辆的轨迹进行分类。
3.货运车辆在一定时间周期内的轨迹数据通常由一系列按时间序列排布的轨迹点组成,每个轨迹点对应有一个轨迹数据,用以描述货运车辆在一定地理空间范围及时间周期内的时空运动状态,例如,一般的货运车辆通常每隔30s就会上传一条记录,以作为一个轨迹点的轨迹数据。轨迹点的轨迹数据通常包括车辆标识(carid)、轨迹点记录或者发生的时刻(t)以及轨迹点所处的经纬度坐标(p),以直观的展示某一车辆在某一时刻所处的地理位置。
4.通常情况下,原始的车辆gps轨迹数据中通常不包含停车信息,因此从原始的车辆gps轨迹数据中往往无法直接有效的识别出车辆在实际运行过程中的停车行为。为此,公开号为cn111340427b,名称为“一种基于轨迹数据的货车运行状态识别方法”的中国发明专利公开了一种基于货车轨迹数据对货车运行状态进行识别的方法,该方法在对轨迹点进行识别阶段主要通过计算得到的相邻两个轨迹点的距离差值以及停留时间差值,并将距离差值和停留时间差值分别与预设的距离阈值和时间阈值进行比较,从而识别出轨迹数据中的停留轨迹点和行驶轨迹点。然而,采用此种方式对轨迹点进行识别往往存在一定的模糊性,识别精确度不高且误差较大。
技术实现要素:
5.本发明的目的在于提供一种基于轨迹信息的车辆移动特征识别方法,以用于解决现有技术中对车辆轨迹点进行识别时存在精确度不高且误差较大的技术问题。
6.本发明的目的通过以下技术方案实现:
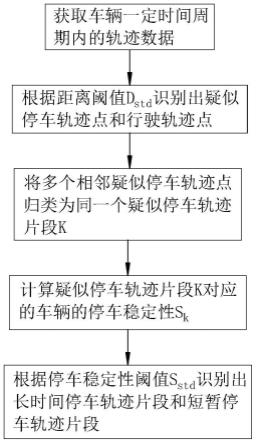
7.一种基于轨迹信息的车辆移动特征识别方法,包括以下步骤:
8.s1.获取车辆在一定时间周期内的轨迹数据,轨迹数据包括若干个按时间序列依次排布的轨迹点pi,其中,i=1,2,3...;
9.s2.设定距离阈值d
std
,依次计算相邻两个轨迹点之间的距离差δd
i,i 1
,将相邻两个轨迹点之间的距离差δd
i,i 1
与距离阈值d
std
进行比较,以识别出轨迹数据中的疑似停车轨迹点和行驶轨迹点,并将行驶轨迹点标记为0,疑似停车轨迹点标记为1;
10.s3.将多个相邻疑似停车轨迹点归类为同一个疑似停车轨迹片段k,其中,k=1,2,
3...;
11.s4.设定停车稳定性阈值s
std
,计算每一个疑似停车轨迹片段k的停车稳定性sk,依次将每一个疑似停车轨迹片段k的停车稳定性sk与停车稳定性阈值s
std
进行比较;
12.若sk≥s
std
,将该疑似停车轨迹片段k归类为长时间停车轨迹片段,且该疑似停车轨迹片段k包含的所有疑似停车轨迹点记为长时间停车轨迹点;
13.若sk<s
std
,将该疑似停车轨迹片段k归类为短暂停车轨迹片段,且该疑似停车轨迹片段k包含的所有疑似停车轨迹点记为短暂停车轨迹点。
14.可选的,步骤s4中,疑似停车轨迹片段k的停车稳定性sk通过以下公式计算:
[0015][0016]
其中,tk为疑似停车轨迹片段k的累计停留时长,dk为疑似停车轨迹片段k的累计行驶距离。
[0017]
可选的,还包括步骤:
[0018]
s5.设定场内转移距离阈值din
std
,计算相邻两个疑似停车轨迹片段k之间的行驶距离dk,
k 1
,将相邻两个疑似停车轨迹片段k之间的行驶距离δd
k,k 1
与场内转移距离阈值din
std
进行比较,以识别出场内转移轨迹片段。
[0019]
进一步的,步骤s5中,相邻两个疑似停车轨迹片段k之间的行驶距离δd
k,k 1
为相邻两个疑似停车轨迹片段k之间所有疑似停车轨迹点与所有行驶轨迹点的行驶距离之和;
[0020]
此时,若δd
k,k 1
≥din
std
,则将相邻两个疑似停车轨迹片段k之间的所有疑似停车轨迹点与所有行驶轨迹点归类为同一个非场内转移轨迹片段;
[0021]
若δd
k,k 1
<din
std
,则将相邻两个疑似停车轨迹片段k之间的所有疑似停车轨迹点与所有行驶轨迹点归类为同一个场内转移轨迹片段。
[0022]
可选的,步骤s2具体包括:
[0023]
s21.将轨迹数据中的第一个轨迹点p1作为计算起点,并将其记为疑似停车轨迹点,标记为1;
[0024]
s22.依次计算相邻两个轨迹点pi和p
i 1
之间的距离差δd
i,i 1
,若δd
i,i 1
<d
std
,则轨迹点p
i 1
记为疑似停车轨迹点,若δd
i,i 1
≥d
std
,则轨迹点p
i 1
记为行驶轨迹点。
[0025]
进一步的,相邻两个轨迹点之间的距离差δd
i,i 1
采用半正矢公式计算,具体为:
[0026][0027]
其中,r为地球半径,为轨迹点所处的经度,λ为轨迹点所处的纬度。
[0028]
可选的,距离阈值d
std
的设定范围为:0km<d
std
<1km。
[0029]
进一步的,场内转移距离阈值din
std
的设定范围为:0km<din
std
<2km。
[0030]
本发明实施例的技术方案至少具有如下优点和有益效果:
[0031]
1、本发明提供的车辆移动特征识别方法,在基于距离阈值d
std
识别出车辆轨迹数据中包含的所有疑似停车轨迹点以及行驶轨迹点的基础上,通过将多个相邻疑似停车轨迹点归类为同一个疑似停车轨迹片段k,并依靠每一个疑似停车轨迹片段k所对应的车辆的停车稳定性sk来对每一个疑似停车轨迹片段k进行进一步的判断,以识别出长时间停车轨迹
片段和短暂停车轨迹片段,能够有效提高识别效率以及识别的精确度,从而为后续分析车辆在一定时间周期内的运行状态以及区域内货运车辆的运行特性提供可靠的数据支撑。
[0032]
2、本发明提供的车辆移动特征识别方法,在识别出车辆轨迹数据中的行驶轨迹点、长时间停车轨迹点以及短暂停车轨迹点的基础上,通过计算相邻两个疑似停车轨迹片段k之间的行驶距离d
k,k 1
,并将行驶距离d
k,k 1
与场内转移距离阈值din
std
进行比较,能够有效且准确的识别出场内转移轨迹片段,从而为判断车辆的停车行为是否为场内转移时产生的停车行为提供可靠的数据支撑。
附图说明
[0033]
图1为本发明实施例1提供的车辆移动特征识别方法的流程图;
[0034]
图2为本发明实施例1提供的疑似停车轨迹点的识别示意图;
[0035]
图3为本发明实施例1提供的疑似停车轨迹片段的判别流程图;
[0036]
图4为本发明实施例2提供的场内转移轨迹片段的识别流程图。
具体实施方式
[0037]
实施例1
[0038]
请参照图1至图3,本实施例提供了一种基于轨迹信息的车辆移动特征识别方法,包括以下步骤:
[0039]
s1.获取车辆在一定时间周期内的轨迹数据,轨迹数据包括若干个按时间序列依次排布的轨迹点pi,其中,i=1,2,3...。可以理解的是,车辆在一定时间周期内的轨迹数据可以是车辆在一天24小时内的轨迹数据,也可以是车辆某一时段内的轨迹数据,此时,p1表示车辆轨迹数据中第一个轨迹点的数据,p2表示车辆轨迹数据中第二个轨迹点的数据,以此类推。
[0040]
需要说明的是,考虑到车辆原始的轨迹数据往往存在一定的重复数据、异常数据以及缺失数据,因此在对车辆轨迹数据进行特征识别前,应对车辆在一定时间周期内的一系列轨迹数据进行预处理,以进一步提高利用车辆轨迹数据进行特征识别时的精确度。其中,对车辆轨迹数据进行预处理包括对车辆轨迹数据进行重复值处理、缺失值处理以及异常值处理等步骤。
[0041]
s2.在获取到车辆一定时间周期内的轨迹数据后,设定距离阈值d
std
,依次计算相邻两个轨迹点之间的距离差δd
i,i 1
,将相邻两个轨迹点之间的距离差δd
i,i 1
与距离阈值d
std
进行比较,以识别出轨迹数据中的疑似停车轨迹点和行驶轨迹点,并将行驶轨迹点标记为0,疑似停车轨迹点标记为1。
[0042]
可以理解的是,基于不同车辆的运行情况不同,本实施例中的距离阈值d
std
设置为一个可调参数,在实际实施时可根据实际情况进行设定,示例的,本实施例的距离阈值d
std
的设定范围为:0km<d
std
<1km。
[0043]
在本实施例中,结合图2所示的疑似停车轨迹点以及行驶轨迹点的识别示意图,上述步骤s2中计算相邻两个轨迹点之间的距离差δd
i,i 1
,并通过距离差δd
i,i 1
识别轨迹数据中的疑似停车轨迹点和行驶轨迹点的过程具体包括:
[0044]
s21.将轨迹数据中的第一个轨迹点p1作为计算起点,并将其记为疑似停车轨迹
点,标记为1;
[0045]
s22.依次计算相邻两个轨迹点pi和p
i 1
之间的距离差δd
i,i 1
,若δd
i,i 1
<d
std
,说明车辆从轨迹点pi至轨迹点p
i 1
这一过程中行驶的距离小于距离阈值d
std
,则轨迹点p
i 1
记为疑似停车轨迹点,并标记为1;反之,若δd
i,i 1
≥d
std
,说明车辆从轨迹点pi至轨迹点p
i 1
这一过程中行驶的距离大于距离阈值d
std
,则轨迹点p
i 1
记为行驶轨迹点,并标记为0。
[0046]
重复上述操作,直至完成对车辆轨迹数据中所有轨迹点的识别,以识别出所有疑似停车轨迹点和行驶轨迹点。
[0047]
需要说明的是,相邻两个轨迹点之间的距离差δd
i,i 1
可以采用半正矢公式进行计算,具体为:
[0048][0049]
其中,r为地球半径,为轨迹点所处的经度,λ为轨迹点所处的纬度。
[0050]
s3.待识别出车辆轨迹数据中包含的所有疑似停车轨迹点和所有行驶轨迹点后,为了提高后续识别出长时间停车轨迹点以及短时间停车轨迹点的效率,将多个相邻疑似停车轨迹点归类为同一个疑似停车轨迹片段k,其中,k=1,2,3...,用于表示第几个疑似停车轨迹片段。例如,继续参照图2,若p1和p2均为疑似停车轨迹点,则将p1和p2归类为同一个疑似停车轨迹片段k,此时k=1,表示第一个疑似停车轨迹片段;若p3、p4和p5均为行驶轨迹点,则将p3、p4和p5归类为同一个行驶轨迹片段;若p6、p7、p8和p9均为疑似停车轨迹点,则将p6、p7、p8和p9归类为同一个疑似停车轨迹片段k,且此时k=2,表示第二个疑似停车轨迹片段。依次类推,直至将车辆轨迹数据中包含的所有疑似停车轨迹点归类为多个不同的疑似停车轨迹片段k。
[0051]
s4.待识别出所有疑似停车轨迹片段k后,基于在疑似停车轨迹片段k所对应的区间范围内,车辆停车往往具有一定的时长,且在时间上具有一定的稳定性,因此通过进一步分析每一个疑似停车轨迹片段k对应的车辆的停车稳定性sk,即可有效的判断出疑似停车轨迹片段k属于长时间停车轨迹片段还是短暂停车轨迹片段,同时,通过将车辆的停车稳定性sk作为判断疑似停车轨迹片段k属于长时间停车轨迹片段还是短暂停车轨迹片段的基础,能够有效提高识别时的精确度,从而更加准确的识别出车辆轨迹数据中的长时间停车轨迹点和短暂停车轨迹点。
[0052]
具体地,先设定停车稳定性阈值s
std
,其中,该停车稳定性阈值s
std
同样设置为一个可调参数,在实际实施过程中可根据实际情况进行设定。其次,结合图3所示的疑似停车轨迹片段的判别流程图,计算每一个疑似停车轨迹片段k的停车稳定性sk,依次将每一个疑似停车轨迹片段k的停车稳定性sk与停车稳定性阈值s
std
进行比较;
[0053]
此时,若sk≥s
std
,将该疑似停车轨迹片段k归类为长时间停车轨迹片段,且该疑似停车轨迹片段k包含的所有疑似停车轨迹点记为长时间停车轨迹点,表示车辆在这些轨迹点处的停车行为属于长时间停车行为,例如,司机休息或装卸货物时的停车行为;
[0054]
反之,若sk<s
std
,将该疑似停车轨迹片段k归类为短暂停车轨迹片段,且该疑似停车轨迹片段k包含的所有疑似停车轨迹点记为短暂停车轨迹点,表示车辆在这些轨迹点处的停车行为属于行驶途中的短时间停车行为,例如,等红绿灯或停车加油时的停车行为。
[0055]
重复上述操作,直至完成对所有疑似停车轨迹片段k的判别。
[0056]
在本实施例中,上述步骤s4中的疑似停车轨迹片段k的停车稳定性sk通过以下公式计算:
[0057][0058]
其中,tk为疑似停车轨迹片段k的累计停留时长,dk为疑似停车轨迹片段k的累计行驶距离。可以理解的是,基于车辆轨迹数据中的所有轨迹点是按时间序列依次排布的,因此,通过获取该疑似停车轨迹片段k中第一个疑似停车轨迹点所处的时刻以及最后一个疑似停车轨迹点所处的时刻,即可计算得到该疑似停车轨迹片段k所对应的车辆的累计停留时长tk;同理,通过获取该疑似停车轨迹片段k所有疑似停车轨迹点之间的行驶距离即可计算得到该疑似停车轨迹片段k所对应的车辆的累计行驶距离dk。
[0059]
由此可见,本实施例提供的车辆移动特征识别方法,在基于距离阈值d
std
识别出车辆轨迹数据中包含的所有疑似停车轨迹点以及行驶轨迹点的基础上,通过将多个相邻疑似停车轨迹点归类为同一个疑似停车轨迹片段k,并依靠每一个疑似停车轨迹片段k所对应的车辆的停车稳定性sk来对每一个疑似停车轨迹片段k进行进一步的判断,以识别出长时间停车轨迹片段和短暂停车轨迹片段,能够有效提高识别效率以及识别的精确度,从而为后续分析车辆在一定时间周期内的运行状态以及区域内货运车辆的运行特性提供可靠的数据支撑。
[0060]
实施例2
[0061]
考虑到通常情况下在对车辆的运行状态进行分析时往往还会对车辆是否属于场内转移(即,在某一特定的作业区域内移动,例如,在厂区内移动)进行分析,因此,在实施例1识别出车辆轨迹数据中包含的行驶轨迹点、长时间停车轨迹点以及短暂停车轨迹点的基础上,还增设有判断车辆是否属于场内转移的步骤,具体包括:
[0062]
s5.设定场内转移距离阈值din
std
,计算相邻两个疑似停车轨迹片段k之间的行驶距离dk,
k 1
,将相邻两个疑似停车轨迹片段k之间的行驶距离δd
k,k 1
与场内转移距离阈值din
std
进行比较,以识别出场内转移轨迹片段。可以理解的是,本实施例的场内转移距离阈值din
std
同样设置为一个可调参数,在实际实施时可根据实际情况进行设定,示例的,考虑当一般货运车辆在进行场内转移时行驶的距离往往不会大于2km,因此,本实施例中场内转移距离阈值din
std
的设定范围为:0km<din
std
<2km。
[0063]
具体地,上述步骤s5中,相邻两个疑似停车轨迹片段k之间的行驶距离δd
k,k 1
为相邻两个疑似停车轨迹片段k之间所有疑似停车轨迹点与所有行驶轨迹点的行驶距离之和;
[0064]
此时,若δd
k,k 1
≥din
std
,则将相邻两个疑似停车轨迹片段k之间的所有疑似停车轨迹点与所有行驶轨迹点归类为同一个非场内转移轨迹片段,说明当前相邻两个疑似停车轨迹片段k包含的所有疑似停车轨迹点对应的停车行为不是在进行场内转移时的停车行为。
[0065]
若δd
k,k 1
<din
std
,则将相邻两个疑似停车轨迹片段k之间的所有疑似停车轨迹点与所有行驶轨迹点归类为同一个场内转移轨迹片段,说明当前相邻两个疑似停车轨迹片段k包含的所有疑似停车轨迹点对应的停车行为是在进行场内转移时的停车行为。
[0066]
由此可见,本实施例提供的车辆移动特征识别方法在识别出车辆轨迹数据中的行
驶轨迹点、长时间停车轨迹点以及短暂停车轨迹点的基础上,通过计算相邻两个疑似停车轨迹片段k之间的行驶距离d
k,k 1
,并将行驶距离d
k,k 1
与场内转移距离阈值din
std
进行比较,能够有效且准确的识别出场内转移轨迹片段,从而为判断车辆的停车行为是否为场内转移时产生的停车行为提供可靠的数据支撑。
[0067]
此外,需要说明的是,本实施例提供的车辆移动特征识别方法除了能够适用于对货运车辆的轨迹数据进行识别外,同样适用于对其他类似的车辆的轨迹数据进行识别,例如,采用本实施例提供的方法还可以对出租车或长短途客运汽车等客运车辆的轨迹数据进行识别,以分析客运车辆在一定时间周期内的运行状态以及区域内客运车辆的运行特性。
[0068]
以上仅为本发明的优选实施例而已,并不用于限制本发明,对于本领域的技术人员来说,本发明可以有各种更改和变化。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。