1.本发明涉及无人机控制技术领域,尤其基于单位对偶四元数的多旋翼无人机一体化跟踪控制方法。
背景技术:
2.在过去的几十年里,无人驾驶飞行器(uav)由于其优越的适应性、生存能力和相对较低的成本而迅速发展并得到越来越广泛的应用。在各类无人机中,倾转旋翼多旋翼无人机是一种特殊的旋翼无人机。它们有六个可控自由度(dof),表明这类无人机是全向力的,这意味着系统的平移和旋转动力学是解耦的,它们在任何悬停方向都是完全驱动的系统。倾转旋翼多旋翼无人机的这些特殊特性允许与环境稳定交互,颠覆了传统固定翼和固定旋翼无人机驱动不足的缺陷,并为未来的空中机器人应用提供了令人信服的解决方案。
3.倾转旋翼多旋翼无人机的力全向性特性赋予其姿态全向性能力,使系统能够实现无限制的空中运动和六自由度轨迹的鲁棒跟踪。倾转旋翼多旋翼无人机的这些优势为航空摄影、工业检测、交互式应用以及在密闭空间环境中的运动和操作提供了独特的优势。
4.在目前研究的倾转旋翼多旋翼无人机控制器的运动描述中,欧拉角法因其直观性而被优先考虑和普遍使用。然而,大多数倾转旋翼多旋翼无人机控制器使用的欧拉角方法,这使得平台模型失去了数学上的简单性。另外,使用欧拉角表示会引入不连续性,使得倾转旋翼多旋翼无人机的分析和控制律设计繁琐。用于对倾斜旋翼多旋翼无人机的位置和姿态跟踪进行建模的计算更简单、更稳定的数学工具是单位对偶四元数。
5.单位对偶四元数是单位四元数和使用pl
ü
ck坐标的平移向量的组合。与只关注姿态的单位四元数不同,单位对偶四元数不仅表示姿态的变化,还表示刚体的位置运动——仅仅使用八个数字(两个约束)。单位对偶四元数以其紧凑、无歧义、无奇异性和计算极简刚体变换等优点在过去十年中被广泛应用于各个领域。在单位对偶四元数的众多应用领域中,无人机、机器人和其他类似平台是典型的例子。
6.近年来,有很多研究关于基于对偶四元数的刚体位置姿态跟踪问题和固定翼、四旋翼等无人机的控制问题。但是,几乎是针对对偶四元数在固定翼或四旋翼无人机等欠驱动系统中的应用的探索。然而,基于单位对偶四元数的倾转多旋翼无人机控制研究较少。倾斜旋翼多旋翼无人机是一类更需要单位对偶四元数的无人机,因为它们具有位姿全向性的特点。
7.因此,提供一种基于单位对偶四元数的多旋翼无人机一体化跟踪控制方法,是本领域技术人员亟需解决的问题。
技术实现要素:
8.有鉴于此,本发明提供了一种基于单位对偶四元数的多旋翼无人机一体化跟踪控制方法,使倾转旋翼多旋翼无人机系统始终稳定。
9.为了实现上述目的,本发明采用如下技术方案:
10.基于单位对偶四元数的多旋翼无人机一体化跟踪控制方法,包括以下步骤:
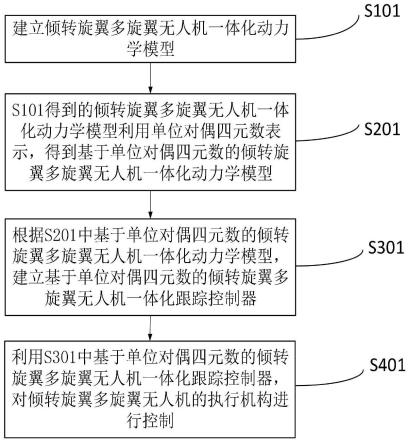
11.s101、建立倾转旋翼多旋翼无人机一体化动力学模型;
12.s201、s101得到的倾转旋翼多旋翼无人机一体化动力学模型利用单位对偶四元数表示,得到基于单位对偶四元数的倾转旋翼多旋翼无人机一体化动力学模型;
13.s301、根据s201中基于单位对偶四元数的倾转旋翼多旋翼无人机一体化动力学模型,建立基于单位对偶四元数的倾转旋翼多旋翼无人机一体化跟踪控制器;
14.s401、利用s301中基于单位对偶四元数的倾转旋翼多旋翼无人机一体化跟踪控制器,对倾转旋翼多旋翼无人机的执行机构进行控制。
15.可选的,s101具体内容为:倾转旋翼多旋翼无人机的系统动力学基于牛顿-欧拉方法,通过平移和旋转动力学来描述倾转旋翼多旋翼无人机的动力学,其倾转旋翼多旋翼无人机一体化动力学模型如下:
[0016][0017]
其中,m和j是倾转旋翼多旋翼无人机的质量和惯性,f和τ是执行机构产生的力和扭矩,ωb是机体坐标系下的角速度,是机体坐标系下的加速度,是机体坐标系下的角加速度。
[0018]
可选的,s201具体内容为:
[0019]
用单位对偶四元数表示的倾转旋翼多旋翼无人机一体化动力学模型,如下:
[0020][0021][0022][0023]
其中,
[0024][0025]
a=-j-1
ωb×
jωbꢀꢀꢀ
(6)
[0026]
表示对偶四元数乘法,表示实际位置和姿态,ξb是机体坐标系下的转矩,是机体坐标系下的角速度,pb是机体坐标系下的位置,是ξb的导数。
[0027]
可选的,利用式(7)来描述倾转旋翼多旋翼无人机旋转p然后的平移pb,具体见下式:
[0028][0029]
其中,q表示旋转的四元数,表示实际位置和姿态。
[0030]
可选的,s301具体包括以下步骤:
[0031]
s3011.基于误差动力学,计算跟踪误差;
[0032]
s3012.基于跟踪误差,建立基于反馈线性化原理的控制器结构;
[0033]
s3013.基于s3012中的控制器结构,建立基于单位对偶四元数的倾转旋翼多旋翼无人机一体化跟踪控制器。
[0034]
可选的,s3011中跟踪误差计算公式如下:
[0035][0036]
其中,表示实际位置和姿态,表示期望配置。
[0037]
可选的,s3012中基于反馈线性化原理的控制器结构为:
[0038][0039]
可选的,s3013中基于单位对偶四元数的倾转旋翼多旋翼无人机一体化跟踪控制器如下式所示:
[0040][0041]
其中,
[0042][0043]
和分别为比例、积分和微分增益。
[0044]
是一种伴随变换,它的计算方法如下:
[0045][0046]
可选的,s401中得到的每个转子所需每个转子的所需转子速度ωi和转子方向αi计算公式见下式:
[0047][0048]
其中,表示,是中第(
·
)个元素,atan2(x,y)表示x和y的元素的四象限反正切,使得-π≤atan2(x,y)≤π。
[0049]
可选的,
[0050]
其中,fd为期望的力,τd为期望的力矩,为静态分配举证的伪逆矩阵,n为倾转旋翼数量。
[0051]
经由上述的技术方案可知,与现有技术相比,本发明提供了基于单位对偶四元数的多旋翼无人机一体化跟踪控制方法:能够耦合平移和旋转运动的运动学和动力学分析;可实现轨迹和姿态的实时跟踪,兼顾倾转多旋翼无人机的特性,消除时变扰动、不确定性、未建模力等引起的跟踪误差,使倾转旋翼多旋翼无人机系统始终稳定。
附图说明
[0052]
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据提供的附图获得其他的附图。
[0053]
图1为本发明提供的基于对偶四元数的倾转旋翼多旋翼无人机跟踪控制方法流程图;
[0054]
图2为本发明实施例提供的实际姿态和实际位置仿真结果,其中2.1为实际姿态q的四个分量相对于时间t的演变(实线是实际轨迹,虚线是期望轨迹),2.2为实际位置ps的四个分量相对于时间t的演变(实线是实际轨迹,虚线是期望轨迹);
[0055]
图3为本发明实施例提供的误差仿真结果,其中3.1为姿态误差q的四个分量相对于时间t的演变,3.2为为姿态误差ps的四个分量相对于时间t的演变;
[0056]
图4为本发明实施例提供的仿真轨迹图。
具体实施方式
[0057]
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0058]
参照图1所示,本实发明公开了基于单位对偶四元数的多旋翼无人机一体化跟踪控制方法,包括以下步骤:
[0059]
s101、建立倾转旋翼多旋翼无人机一体化动力学模型;
[0060]
s201、s101得到的倾转旋翼多旋翼无人机一体化动力学模型利用单位对偶四元数表示,得到基于单位对偶四元数的倾转旋翼多旋翼无人机一体化动力学模型;
[0061]
s301、根据s201中基于单位对偶四元数的倾转旋翼多旋翼无人机一体化动力学模型,建立基于单位对偶四元数的倾转旋翼多旋翼无人机一体化跟踪控制器;
[0062]
s401、利用s301中基于单位对偶四元数的倾转旋翼多旋翼无人机一体化跟踪控制器,对倾转旋翼多旋翼无人机的执行机构进行控制。
[0063]
进一步的,s101具体内容为:倾转旋翼多旋翼无人机的系统动力学基于牛顿-欧拉方法,通过平移和旋转动力学来描述倾转旋翼多旋翼无人机的动力学,其倾转旋翼多旋翼无人机一体化动力学模型如下:
[0064][0065]
其中,m和j是倾转旋翼多旋翼无人机的质量和惯性,f和τ是驱动产生的力和扭矩,ωb是机体坐标系下的角速度,是机体坐标系下的加速度,是机体坐标系下的角加速度。
[0066]
进一步的,s201具体内容为:
[0067]
用单位对偶四元数表示的倾转旋翼多旋翼无人机一体化动力学模型,如下:
[0068][0069][0070][0071]
其中,
[0072][0073]
a=-j-1
ωb×
jωbꢀꢀꢀ
(6)
[0074]
表示对偶四元数乘法,表示实际位置和姿态,ξb是机体坐标系下的转矩,是机体坐标系下的角速度,pb是机体坐标系下的位置。是ξb的导数。进一步的,利用式(7)来描述倾转旋翼多旋翼无人机旋转p然后的平移pb,具体见下式:
[0075][0076]
其中,q是表示旋转的四元数,表示实际位置和姿态。
[0077]
进一步的,s301具体包括以下步骤:
[0078]
s3011.基于误差动力学,计算跟踪误差;
[0079]
s3012.基于跟踪误差,建立基于反馈线性化原理的控制器结构;
[0080]
s3013.基于s3012中的控制器结构,建立基于单位对偶四元数的倾转旋翼多旋翼无人机一体化跟踪控制器。
[0081]
进一步的,s3011中跟踪误差计算公式如下:
[0082][0083]
其中,表示实际位置和姿态,表示期望配置。
[0084]
进一步的,s3012中基于反馈线性化原理的控制器结构为:
[0085][0086]
更进一步的,s3013中基于单位对偶四元数的倾转旋翼多旋翼无人机一体化跟踪控制器如下式所示:
[0087][0088]
其中,
[0089][0090]
和分别为比例、积分和微分增益。
[0091]
是一种伴随变换,它的计算方法如下:
[0092][0093]
进一步的,s401中得到的每个转子所需每个转子的所需转子速度ωi和转子方向αi计算公式见下式:
[0094][0095]
其中,表示,是中第(
·
)个元素,atan2(x,y)表示x和y的元素的四象限反正切,使得-π≤atan2(x,y)≤π。
[0096]
更进一步的,
[0097]
其中,fd为期望的力,τd为期望的力矩,为静态静态分配举证的伪逆矩阵,n为倾转旋翼数量。
[0098]
具体的,力f和扭矩τ与平方转子速度ωi,之间的关系如方程所示
[0099][0100][0101]
其中a是静态分配矩阵,如下公式所示,n是倾斜臂的数量,αi是转子方向,向量的元素对应于每个平方转子速度的横向和垂直分量,ωi,在各自的转子单元框架中。
[0102][0103]
其中γi是机体x-轴和臂i在机体x-y-平面之间的角度,βi是机体x-y-平面和臂i之间的角度。cf是转子推力系数,cd是转子阻力系数(相对于cf),si是附在臂i上的转子旋转方向。
[0104]
在期望的力fd和力矩τd由控制器的公式推导出后,执行器命令-转子速度(ωi)和转子方向(αi)-需要使用上述公式中的空气动力学模型来确定。然而,由于静态分配矩阵a是不可逆的,因此系统是欠定的。在这种情况下,可以利用广义逆矩阵之一,即moore-penrose伪逆矩阵来计算转子速度和方向。moore-penrose伪逆矩阵可以得到公式(14)的最小范数解。
[0105]
为了验证设计的跟踪器的稳定性和优越性,设计的pid反馈线性化跟踪器将用于模拟倾斜旋翼六旋翼无人机的实际运动和旋转。将使用一个具体示例来演示pid反馈线性化跟踪器的工作原理。具体实施例如下:
[0106]
allenspach等人的倾转旋翼六旋翼无人机的相关参数可以直接使用。无人机的质量为4.27kg,机身框架中的惯性矩矩阵j如下:
[0107][0108]
静态分配矩阵a中的参数设置根据表1:
[0109]
表1
[0110][0111]
倾斜旋翼六旋翼无人机的pid反馈线性化跟踪器的控制增益如下:
[0112][0113]
期望的运动轨迹和方向设计如下:
[0114][0115]
其中,
[0116][0117]
为了更好地测试我们提出的pid反馈线性化跟踪器对时变扰动、不确定性和未建模力的鲁棒性,进行了以下测试:在上述轨迹和姿态的前提下,2n
·
m的扰动转矩和扰动在150到153秒的x-、y-和z-方向上,向倾转旋翼六旋翼无人机施加30n的力。
[0118]
使用上一节中设置的场景,从pid反馈线性化跟踪器获得的结果如图2所示。图2.1显示了实际方向q的四个分量相对于时间t的演变,图2.2显示了实际位置ps的三个分量相对于时间t的演变。从图2中可以看出,倾转多旋翼无人机的轨迹和姿态控制在使用pid反馈线性化跟踪器时是有效的,位置和姿态的变化非常平滑,几乎没有误差和超调。
[0119]
为了更好地展示所提出的pid反馈线性化跟踪器的优越性,姿态误差和位置误差如图3所示。图3.1说明了姿态误差qe的四个分量相对于时间t的演变,图3.2展示了位置误差的三个分量相对于时间t的演变。从图3中可以看出,所提出的pid反馈线性化跟踪器对于位置和姿态的跟踪控制是非常优秀的,即大多数时间位置和姿态几乎没有误差。虽然
图3.2中位置控制的结果略逊于姿态控制,但8mm的位置误差相对于整个运动轨迹也相当小。此外,根据对x-、y-和z-方向力和扭矩扰动150到153秒的响应,可以证明所设计的pid反馈线性化跟踪器可以实现倾转旋翼多旋翼无人机对各种干扰具有很强的鲁棒性。
[0120]
此外,上述场景中的运动轨迹也绘制在图4中,以更详细地展示倾斜旋翼六旋翼无人机的具体轨迹和姿态。从图4中可以看出,倾转六旋翼无人机的位置轨迹和姿态角非常平滑,无人机可以在没有奇异点的情况下大致遵循我们期望的运动轨迹和姿态,另外抗干扰的鲁棒性相当强大。
[0121]
本发明还提供一种基于单位对偶四元数的多旋翼无人机一体化跟踪控制装置,包括处理器和存储有程序指令的存储器,处理器运行程序指令时执行基于单位对偶四元数的多旋翼无人机一体化跟踪控制方法。
[0122]
对所公开的实施例的上述说明,按照递进的方式进行,使本领域专业技术人员能够实现或使用本发明。对这些实施例的多种修改对本领域的专业技术人员来说将是显而易见的,本文中所定义的一般原理可以在不脱离本发明的精神或范围的情况下,在其它实施例中实现。因此,本发明将不会被限制于本文所示的这些实施例,而是要符合与本文所公开的原理和新颖特点相一致的最宽的范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。