1.本发明属于长时目标跟踪技术领域,尤其涉及一种基于模板匹配的孪生网络长时目标跟踪方法。
背景技术:
2.目标跟踪在智能监控、智能交通、自动驾驶、军事制导以及无人飞行器等领域发挥着重要作用。随着深度学习短时目标跟踪性能不断地提高,近几年人们开始逐渐关注更接近实际场景的长时目标跟踪应用。
3.与短时跟踪相比,长时跟踪任务需要跟踪器具有捕获长期视频中被跟踪对象并处理频繁出现的目标消失和重新出现的能力。主要从两个方面提出了更多的挑战。
4.由于长时目标跟踪的视频序列长度远大于短时场景,并且目标形变、消失与重现问题尤其突出,直接应用短时目标跟踪算法无法应对这些困难,跟踪性能极具下降。因此,许多长时目标跟踪器是在短时跟踪算法上通过目标丢失判断机制和重检测机制,来解决目标容易跟丢的问题。
5.长时目标跟踪器中目标重检测机制常采用滑窗全局检测或扩大搜索区域的方法,但是,由于这些方法的检测区域较大,导致这些方法非常耗时,甚至很多深度学习长时目标跟踪算法无法实现实时目标跟踪。
技术实现要素:
6.本发明的目的是提供一种基于模板匹配的孪生网络长时目标跟踪方法,降低长时目标跟踪过程中目标重检测的耗时,以满足实时目标跟踪需求。
7.本发明采用以下技术方案:基于模板匹配的孪生网络长时目标跟踪方法,包括以下步骤:
8.采用siamfc 目标跟踪方法确定当前帧的第一目标跟踪结果图像和跟踪置信度分数;
9.根据跟踪置信度分数判断目标是否丢失;
10.当目标丢失时,采用ncc模板匹配搜索法更新当前帧中的目标位置;
11.以目标位置为中心,采用动态匹配模板图像和siamfc 目标跟踪方法对当前帧进行目标跟踪,得到第二目标跟踪结果图像;
12.以第二目标跟踪结果图像作为当前帧的目标跟踪结果图像。
13.进一步地,采用ncc模板匹配搜索法更新当前帧中的目标位置包括:
14.以动态匹配模板图像为匹配模板,计算匹配模板与当前帧中的所有子图像的第一相似度;
15.选择第一相似度最大值对应的相似子图像;
16.根据相似子图像确定目标位置。
17.进一步地,根据相似子图像确定目标位置之前还包括:
18.计算相似子图像和动态匹配模板图像的第二相似度;
19.当第二相似度≥相似度阈值时,获取相似子图像对应的位置,并将该位置作为目标位置。
20.进一步地,当第二相似度值<相似度阈值时,将上一帧的目标位置作为当前帧的目标位置。
21.进一步地,第二相似度的计算方法为:
[0022][0023]
其中,ssim(x,y)为图像x和图像y的相似度,l(x,y)为亮度相似性函数,c(x,y)为对比度相似性函数,s(x,y)为结构相似性函数,α、β和γ均为常数,μ
x
为图像x的灰度平均值,μy为图像y的灰度平均值,σ
x
为图像x的方差,σy为图像y的方差,σ
xy
为图像x和图像y的协方差,c1=(k1l)2,c2=(k2l)2,k1、k2和l均为常数。
[0024]
进一步地,确定跟踪置信度分数之后还包括:
[0025]
将跟踪置信度分数与模板更新阈值进行比较;
[0026]
当跟踪置信度分数≥模板更新阈值时,将跟踪置信度分数对应的第一目标跟踪结果图像作为新的动态匹配模板图像。
[0027]
进一步地,模板更新阈值根据目标跟踪视频第二帧的跟踪置信度分数计算得到。
[0028]
进一步地,当跟踪置信度分数<模板更新阈值时,不更新动态匹配模板图像。
[0029]
进一步地,根据跟踪置信度分数判断目标是否丢失包括:
[0030]
将跟踪置信度分数与丢失阈值进行比较;
[0031]
当跟踪置信度分数≥丢失阈值时,确定目标未丢失;
[0032]
当跟踪置信度分数小于丢失阈值时,确定目标丢失。
[0033]
本发明的另一种技术方案:基于模板匹配的孪生网络长时目标跟踪装置,包括存储器、处理器以及存储在存储器中并可在处理器上运行的计算机程序,处理器执行计算机程序时实现上述的基于模板匹配的孪生网络长时目标跟踪方法。
[0034]
本发明的有益效果是:本发明在siamfc 目标跟踪方法的基础上,通过ncc模板匹配搜索法进行预测粗定位,找到当前帧中的目标位置,在以该目标位置为中心结合动态匹配模板图像进行目标跟踪,可以有效地降低长时目标跟踪过程中的重检测时间,进而满足了实时目标跟踪的需求。
附图说明
[0035]
图1为本发明实施例基于模板匹配的孪生网络长时目标跟踪方法的流程图;
[0036]
图2为本发明实施例基于模板匹配的孪生网络长时目标跟踪方法的原理框图;
[0037]
图3为本发明实施例中vot2019_lt数据集“skiing”视频动态匹配模板更新示意图;
[0038]
图4为本发明实施例中基于动态模板匹配的全局搜索重检测流程图;
[0039]
图5为本发明实施例中基于siamfc 算法的长时目标跟踪流程图;
[0040]
图6为lasot数据集“elephant-16”视频四种长时目标跟踪方法的视觉结果比较图;
[0041]
图7为vot2019_lt数据集“warmup”视频四种长时目标跟踪方法的视觉结果比较图;
[0042]
图8为tlp数据集“carchase1”视频四种长时目标跟踪方法的视觉结果比较图;
[0043]
图9为本发明实施例基于模板匹配的孪生网络长时目标跟踪装置的结构示意图。
具体实施方式
[0044]
下面结合附图和具体实施方式对本发明进行详细说明。
[0045]
在长时目标跟踪过程中,当目标丢失后为了重新追踪到丢失目标,当前许多长时目标跟踪算法的重检测机制较为耗时,算法均不能满足实时跟踪性能。如mbmd算法设计了一种回归网络和匹配网络的框架来进行长时目标跟踪,通过滑窗检测方式可以较为有效的对目标进行找回,但其在实时性上仍有一定的缺陷,在vot2018_lt数据集上目标跟踪速率仅为2.5fps。dasiamrpn_lt和siamrpn _lt算法当判断目标丢失后,会将目标搜索区域由255x255扩大到831x831的方式进行目标重检测,其在vot2018_lt数据集上跟踪速率分别为20.8fps和21.1fps。
[0046]
因此本发明提出了一种基于模板匹配的孪生网络长时目标跟踪方法(siamese networks long-term tracking based on dynamic template matching,siamtm_lt),该方法不但能够显著提高长时跟踪性能,而且跟踪速度达到45fps左右,能够满足实施目标跟踪的需求。
[0047]
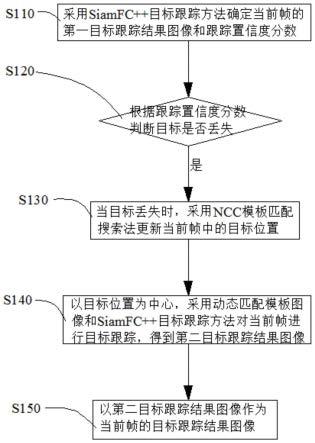
具体的,如图1所示,本发明实施例公开了一种基于模板匹配的孪生网络长时目标跟踪方法,包括以下步骤:步骤s110、采用siamfc 目标跟踪方法确定当前帧的第一目标跟踪结果图像和跟踪置信度分数;步骤s120、根据跟踪置信度分数判断目标是否丢失;步骤s130、当目标丢失时,采用ncc模板匹配搜索法更新当前帧中的目标位置;步骤s140、以目标位置为中心,采用动态匹配模板图像和siamfc 目标跟踪方法对当前帧进行目标跟踪,得到第二目标跟踪结果图像;步骤s150、以第二目标跟踪结果图像作为当前帧的目标跟踪结果图像。
[0048]
如图2所示,本发明在siamfc 目标跟踪方法的基础上,通过ncc模板匹配搜索法进行预测粗定位,找到当前帧中的目标位置,在以该目标位置为中心结合动态匹配模板图像进行目标跟踪,可以有效地降低长时目标跟踪过程中的重检测时间,进而满足了实时目标跟踪的需求。
[0049]
长时目标跟踪方法的关键在于能否稳定连续地跟踪目标,判断目标丢失并重新找回。目前许多长时跟踪方法常采用滑窗全局检测和扩大搜索区域等目标重检测机制方法来解决目标丢失问题,但是,由于这些方法都具有需要先提取特征图等手段,过程非常耗时,导致很多深度学习长时目标跟踪方法无法实现实时目标跟踪。本发明通过非常规应用,引入模板匹配方法进行重检测,模板匹配方法由于其不需要提取图像的特征图,仅需要图像简单要素(如灰度、纹理等特征)即可完成目标的粗定位,虽然精度较为下降,但是通过前后两次siamfc 目标跟踪可以弥补精度下降的问题,甚至还会提升检测精度,从而可以有效降低重检测时间,并且提出动态匹配模板的重检测策略以及动态更新策略,能更快速有效
定位重现目标或修正跟丢目标,从而有效提高了长时目标跟踪性能。另外,由于本发明方法跟踪更为准确,减少了需要重检测视频帧的数量,因此,可以进一步降低跟踪时间,提高跟踪帧率到40fps,满足实时目标跟踪性能。
[0050]
在本实施例中,根据跟踪置信度分数判断目标是否丢失包括:将跟踪置信度分数与丢失阈值进行比较;当跟踪置信度分数≥丢失阈值时,确定目标未丢失;当跟踪置信度分数小于丢失阈值时,确定目标丢失。
[0051]
具体的,在本发明实施例中采用ncc模板匹配搜索法更新当前帧中的目标位置包括:以动态匹配模板图像为匹配模板,计算匹配模板与当前帧中的所有子图像的第一相似度;选择第一相似度最大值对应的相似子图像;根据相似子图像确定目标位置。
[0052]
更为具体的,首先输入搜索图像x,初始目标模板z,动态匹配模板t=z,目标初始位置pos
ini
。接着,以初始目标模板z为跟踪模型进行siamfc 目标跟踪,得到当前帧的目标跟踪结果图像x
t
(pos
opt
)和跟踪置信度分数score
max
(z,x)。然后,根据跟踪置信度分数score
max
(z,x)判断目标是否丢失。若score
max
(z,x)小于重检测判别阈值th
tl
,则认为目标跟踪丢失,需要启动动态模板匹配的全局搜索重检测机制。反之,若score
max
(z,x)大于等于th
tl
,则认为目标未跟踪丢失。
[0053]
当认为目标跟踪丢失后,启动动态模板匹配的全局搜索重检测机制,根据ssim相似度判别结果决定是否更新目标初始位置pos
ini
。再以目标初始位置pos
ini
为中心的局部区域内,以动态匹配模板t为跟踪模型进行siamfc 目标跟踪,得到目标跟踪结果x
t_t
(pos
opt
),最后更新目标跟踪结果x
t
(pos
opt
)=x
t_t
(pos
opt
)。
[0054]
作为一种具体的实现方式,在判断是否更新目标初始位置时,先输入待搜索图像x,动态匹配模板t,目标初始位置pos
ini
,目标子图片x(x
ini
,y
ini
)。接着使用动态匹配模板t在待搜索图像x上进行归一化互相关(ncc)全局模板匹配,获得重检测粗略预测位置pos
tm
。
[0055]
在一个实施例中,根据相似子图像确定目标位置之前还包括:计算相似子图像和动态匹配模板图像的第二相似度;当第二相似度≥相似度阈值时,获取相似子图像对应的位置,并将该位置作为目标位置。当第二相似度值<相似度阈值时,将上一帧的目标位置作为当前帧的目标位置。
[0056]
其中,第二相似度的计算方法为:
[0057][0058]
其中,ssim(x,y)为图像x和图像y的相似度,l(x,y)为亮度相似性函数,c(x,y)为对比度相似性函数,s(x,y)为结构相似性函数,α、β和γ均为常数,μ
x
为图像x的灰度平均值,μy为图像y的灰度平均值,σ
x
为图像x的方差,σy为图像y的方差,σ
xy
为图像x和图像y的协方差,c1=(k1l)2,c2=(k2l)2,k1、k2和l均为常数。
[0059]
也就是说,将模板匹配图像作为计算重检测预测目标图像x
tm
,再计算其和动态匹配模板t的结构相似性ssim
tm
=ssim(x
tm
,t)。若ssim
tm
大于等于相似度判别阈值th
tm
,保留重检测粗略预测位置pos
tm
。若ssim
tm
小于阈值th
tm
,淘汰重检测预测结果。
[0060]
若ssim
tm
大于等于相似度判别阈值th
tm
,更新目标初始位置为重检测粗略预测位
置pos
ini
=pos
tm
,结束动态模板匹配的全局搜索重检测机制,后续可继续利用siamfc 跟踪器进一步获得目标准确位置,该方法的具体流程图如图5所示。
[0061]
若ssim
tm
小于阈值th
tm
,不更新目标初始位置pos
ini
,结束动态模板匹配的全局搜索重检测机制。
[0062]
在本发明实施例中,为了实现siamfc 目标跟踪方法和ncc模板匹配搜索法的有效结合,确定跟踪置信度分数之后还包括:
[0063]
将跟踪置信度分数与模板更新阈值进行比较;当跟踪置信度分数≥模板更新阈值时,将跟踪置信度分数对应的第一目标跟踪结果图像作为新的动态匹配模板图像。模板更新阈值根据目标跟踪视频第二帧的跟踪置信度分数计算得到。当跟踪置信度分数<模板更新阈值时,不更新动态匹配模板图像。
[0064]
具体的,ncc模板匹配全局搜索算法因其匹配精度高、稳健性强,被广泛用作衡量图像间相似度的指标。在一个实施例的模板匹配过程中,如图4所示,对于m
×
n大小的待检索图像x和w
×
h大小的匹配模板t,模板t在待检索图像x上平移,依次与x图像在(xy,处截取的子图片xc(x,y)={x(x i,y j)|i∈[1,
…
,w],j∈[1,
…
,h]}采用公式(2)进行相似度比较。
[0065][0066]
其中,{ncc(x,y)|x∈[1,
…
,m],y∈[1,
…
,n]}中最大值所对应的位置就是模板匹配位置pos
tm
=(x
tm_opt
,y
tm_opt
),对应子图片x
tm
=xc(x
tm_opt
,y
tm_opt
)即为动态模板匹配图像。在该公式中,x和y均表示图像的坐标值。通过该方法使用逐帧动态更新模板t进行全局模板匹配,进一步提高抗干扰性能。
[0067]
另外,为了避免模板匹配不准确,造成积累误差,因此本实施例提出了模板相似度判别分析与定位优选策略,从而保证为后续目标跟踪算法提供较准确的预测初始位置。ssim结构相似性是更符合人眼视觉的图像评价指标,分别从亮度、对比度和结构三个特征来综合衡量图像的相似性,具体请参考公式(1)。
[0068]
模板匹配结果越靠近目标真实位置,后续目标跟踪算法的跟踪性能越准确,因此改进算法采用公式(3)的模板匹配相似度判别准则对匹配结果进行分类处理。
[0069][0070]
对动态匹配模板t和输出匹配图像x
tm
获得ssim
tm
=ssim(x
tm
,t)相似度指标,以此衡量模板匹配准确度。如果ssim
tm
大于设定的匹配相似度阈值th
tm
,则表明模板匹配较准确,匹配位置更靠近跟踪目标位置,因此后续目标跟踪算法的初始位置pos
ini
采用模板匹配位置pos
tm
更新代替;否则ssim
tm
小于匹配相似度阈值th
tm
,则认为模板匹配不够准确,此时后续目标跟踪算法的初始位置不更新,仍为上一帧目标跟踪位置。通过在多个长时标准数据集上进行大量实验,获得th
tm
=0.15为最优匹配阈值。
[0071]
另外,由于siamfc 算法分类分支置信度最大得分值反映预测目标与模板的相似
度,跟踪丢失时置信度峰值普遍较低。故本发明引入置信度峰值判断目标的跟丢状态,提出公式(4)的重检测机制启动策略。使用置信度峰值分析目标跟踪状态,判断是否需要进行重检测处理。
[0072][0073]
如公式(4)所示,如果置信度峰值score
max
(z,x)大于等于目标丢失判别阈值th
tl
,则认为跟踪目标相对准确,不启动目标重检测机制,即目标重检测标志设为0。反之,如果score
max
(z,x)小于th
tl
,认为目标跟踪不准确或目标丢失,则启动目标重检测机制,更新目标重检测标志为1,并采用动态模板匹配全局搜索方法进行目标重检测。
[0074]
通过在多个长时标准数据集上进行大量实验,获得目标丢失判别阈值th
tl
选取0.3时为最优选择。
[0075]
长时视频序列中,目标外观形变会严重影响模板匹配目标重检测定位的准确度,造成改进模板匹配策略无法较好的发挥作用,因此本本发明实施例引入动态匹配模板更新策略进一步提高抗干扰性能。使用置信度峰值分析目标跟踪状态,判断当前帧跟踪结果是否可以作为匹配模板。
[0076]
如果置信度峰值score
max
(z,x)大于等于模板更新判别阈值th
td
,则认为跟踪目标准确,用当前帧跟踪目标x(pos
opt
)更新替换动态匹配模板;反之,如果score
max
(z,x)小于th
td
,认为目标跟踪不准确或目标丢失,则不进行匹配模板更新。
[0077]
本实施例引入动态匹配模板更新策略,在每一帧siamfc 目标跟踪以后进行如公式(5)所示的模板更新。经过大量实验分析,第一帧指定跟踪目标后,通常第二帧均能较准确地跟踪到目标位置,因此以第二帧置信度峰值score
max
(z,x2)为基准,通过在多个长时标准数据集上进行大量实验,获得模板更新判别阈值th
td
=score
max
(z,x2)-0.15时为最优选择。
[0078][0079]
根据公式(5),本发明实施例逐帧判别更新动态匹配模板,如图3给出vot2019_lt数据集“skiing”视频动态匹配模板更新示意图。第一帧图像目标作为初始模板,随后各视频帧运动目标在形态和尺度上均发生不断变化,与初始目标模板有了显著的外观差异。本文算法目标跟踪后不断更新动态匹配模板,从图3可以发现更新后的动态匹配模板与当前视频帧的目标形态更相似,因此为下一帧跟准目标提供可靠的先决条件。
[0080]
为了进一步证明本发明实施例的有效性,还进行了下述对比验证实验。本实验均在intel i7-6700 3.40ghz,geforce gtx titan x 32gb gpu上采用python的pytorch编程实现。本实施例方法分别在lasot、vot2019_lt和tlp三个视频数据库上,与多种先进目标跟踪算法进行性能对比,其中,lasot数据集使用成功率(success)、归一化精确率(normalized precision)和精确率(precision)三个评价指标。vot2019_lt数据集使用跟踪精确率(precision)、召回率(recall)、f值(f-score),以及跟踪速度(frames per second,fps)作为长时跟踪性能评价指标。tlp数据集使用成功率(success)和精确率(precision)两个评价指标。本发明实施例siamtm_lt方法主干网络采用alexnet网络提取
特征信息。
[0081]
(1)定量结果与分析:
[0082]
表1、表2和表3分别给出本发明方法与当前多个先进长时目标跟踪算法在lasot、vot2019_lt、tlp数据集上的对比结果。
[0083]
lasot的测试集共有280个长时视频序列,平均帧数在2512帧左右。与ltmu、dimp50、dimp18、global track、siamcar和atom算法相比,本发明方法的成功率相比上述方法分别提高了0.2%、0.6%、4.0%、5.7%、5.8%和5.9%,归一化精确率相比上述方法分别提高了0.4%、2.1%、5.6%、7.2%、5.9%和9.3%,精确率相比上述方法分别提高了1.4%、2.2%、5.3%、5.8%、6.2%和8.1%。与表中其余算法相比,本发明方法在成功率、归一化精确率和精确率上,均具有明显优势。
[0084]
表1 基于lasot数据集的目标跟踪性能对比结果
[0085][0086]
vot2019_lt数据集共有50个长时视频序列,平均帧数在4296帧左右。与siamdw_lt算法相比,本发明方法虽然跟踪性能低一些,但跟踪速度是siamdw_lt算法的16.16倍。与siamrpns_lt算法相比,本发明方法的精确率低一些,但是召回率提高14.2%,f值提高7.8%。
[0087]
如表2所示,与siamrpn _lt、mbdet、siamfcos_lt、fucolot算法相比,本发明方法的精确率分别提高了4.9%、7.8%、19.8%和18.4%,召回率分别提高了0.5%、5.2%、3.6%和23.9%,f值分别提高了2.5%、6.4%、11.4%和22.3%。和表中其余算法相比,本发明方法的精确率、召回率、f值也具有明显优势。从跟踪速度方面分析,本发明方法的跟踪速度分别是siamrpn _lt、mbdet、siamrpns_lt、siamfcos_lt和fucolot算法的2.03倍、20.2倍、1.77倍、26.93倍和5.77倍。由此可知,本发明方法不仅跟踪性能明显提高,而且跟踪帧率达到40.4fps,具有良好的实时性。
[0088]
表2 基于vot2019_lt数据集的目标跟踪性能对比结果
[0089][0090]
如表3所示,tlp数据集共有50个长时视频序列,平均帧数在13529帧左右。本发明方法和global track算法的跟踪性能相近,成功率仅略高0.5%,精确率仅低0.4%。和表中其他算法相比,本发明方法的成功率和精确率都具有明显优势。
[0091]
表3 基于tlp数据集的目标跟踪性能对比结果
[0092][0093][0094]
综上,图6、图7和图8分别展示了lasot、vot2019_lt和tlp数据集上多种优秀长时目标跟踪方法的视觉定性对比结果。
[0095]
图6中lasot数据集“elephant-16”视频第540帧和第1505帧中目标被遮挡,本发明方法可以快速检测到目标位置,并保持稳定跟踪。ltmu方法虽然也能检测到目标,但是跟踪目标尺度不准确,且容易跟错到相似物上。
[0096]
图7中vot2019_lt数据集“warmup”视频第3795帧目标被完全遮挡,第3800帧目标重新出现,但其外观与初始目标模板相差较大。第3805帧本发明方法通过模板匹配重检测机制能快速有效的检测到目标,因此在后续各帧视频中本发明siamdmt_lt方法均能有效跟准目标。mbdet方法直到第3815帧才检测到目标,其余两种方法均未准确跟踪到目标。
[0097]
图8中为tlp数据集“carchase1”视频跟踪结果,第2530帧和第4800帧目标发生出视野情况,本发明方法立即启动模板匹配重检测机制,当2560帧和第4830帧目标重现以后siamdmt_lt算法对重现目标捕捉较准确,因此后续各帧视频跟踪效果明显更为准确。
[0098]
综上,这些视觉跟踪结果表明本发明方法在长时目标跟踪应用中,对“出视野”和“目标遮挡”等属性视频跟踪具有良好的跟踪性能。
[0099]
本发明还公开了一种基于模板匹配的孪生网络长时目标跟踪装置,如图9所示,包括存储器210、处理器220以及存储在存储器210中并可在处理器220上运行的计算机程序230,处理器220执行计算机程序230时实现上述的一种基于模板匹配的孪生网络长时目标跟踪方法。
[0100]
上述的装置可以是桌上型计算机、笔记本、掌上电脑及云端服务器等计算设备。该装置可包括但不仅限于处理器、存储器。本领域技术人员可以理解,该装置可以包括更多或更少的部件,或者组合某些部件,或者不同的部件,例如还可以包括输入输出设备、网络接入设备等。
[0101]
处理器可以是中央处理单元(central processing unit,cpu),该处理器还可以是其他通用处理器、数字信号处理器(digital signal processor,dsp)、专用集成电路(application specific integrated circuit,asic)、现成可编程门阵列(field-programmable gate array,fpga)或者其他可编程逻辑器件、分立门或者晶体管逻辑器件、分立硬件组件等。通用处理器可以是微处理器或者该处理器也可以是任何常规的处理器等。
[0102]
存储器在一些实施例中可以是所述装置的内部存储单元,例如装置的硬盘或内存。所述存储器在另一些实施例中也可以是所述装置的外部存储设备,例如所述装置上配备的插接式硬盘,智能存储卡(smart media card,smc),安全数字(secure digital,sd)卡,闪存卡(flash card)等。进一步地,所述存储器还可以既包括所述装置的内部存储单元也包括外部存储设备。所述存储器用于存储操作系统、应用程序、引导装载程序(bootloader)、数据以及其他程序等,例如所述计算机程序的程序代码等。所述存储器还可以用于暂时地存储已经输出或者将要输出的数据。
[0103]
需要说明的是,上述装置的具体内容,由于与本发明方法实施例基于同一构思,其具体功能及带来的技术效果,具体可参见方法实施例部分,此处不再赘述。
[0104]
在上述实施例中,对各个实施例的描述都各有侧重,某个实施例中没有详述或记载的部分,可以参见其它实施例的相关描述。本领域普通技术人员可以意识到,结合本发明中所公开的实施例描述的各示例的模块及算法步骤,能够以电子硬件、或者计算机软件和电子硬件的结合来实现。这些功能究竟以硬件还是软件方式来执行,取决于技术方案的特定应用和设计约束条件。专业技术人员可以对每个特定的应用来使用不同方法来实现所描述的功能,但是这种实现不应认为超出本发明的范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。