技术特征:
1.一种无人船自主巡航方法,其特征在于,包括以下步骤:s1、船载slam系统通过无人船上传感器采集数据并处理生成无人船的位姿和地图构建更新,激光雷达生成点云数据并处理对无人船周围的障碍识别和边界位姿识别,进行生成网格地图;s2、无人船接收巡航指令;s3、无人船主控系统根据巡航指令、位姿和地图进行线路规划,并形成参考巡航路径;s4、无人船根据参考巡航路径开始进行巡航,巡航的过程中,通过无人船非线性控制器对无人船动力模型的最优解进行求解;s5、根据无人船动力模型的最优解以及参考巡航路径来修正无人船的实际航向。2.根据权利要求1所述的一种无人船自主巡航方法,其特征在于,所述非线性控制器采用最小二乘法求解最优解,然后通最优解惩罚给定预测时域窗口n
c
(t
j
≤t≤t
j
n
c
)内,预测状态q
k
和控制u
k
轨迹与其指定参考的偏差:轨迹与其指定参考的偏差:q
k 1
=f(q
k
,u
k
),k=j,...,j n
c-1q
k,min
≤q
k
≤q
k,max
,k=j,...,j n
c
u
k,min
≤u
k
≤u
k,max
,k=j,...,j n
c-1其中表示船舶状态,表示控制输入,表示当前状态估计,和分别表示时变状态和控制参考;表示终端参考状态;和是正定权重矩阵,用于惩罚与期望值的偏差;q
k,min
和q
k,max
分别表示状态的下界和上界;u
k,min
和u
k,max
分别表示控制输入的下限和上限。3.根据权利要求2所述的一种无人船自主巡航方法,其特征在于,所述q
k
=[x y ψ u v r]
t
,u
k
=[f
1 f2]
t
其中x y ψ分别是船舶沿x轴、y轴、z轴方向的纵荡、横荡、垂荡位置,u v r分别是浪涌速度(u)、摇摆速度(v)和偏航率(r);f1和f2分别是2台船舶推进器的推力。4.根据权利要求1所述的一种无人船自主巡航方法,其特征在于,所述无人船采用六自由度模型来描述其运动,六自由度模型考虑了无人船所处真实水域环境中复杂运动情况的全部自由度,无人船的状态矢量由等式1表示,包含船体沿x轴、y轴、z轴方向的纵荡、横荡、垂荡以及绕x轴、y轴、z轴纵摇、横摇以及艏摇,六自由度模型有基于惯性坐标性和载体坐标系两种描述方式,惯性坐标系(a0x0y0z0)以地球中心为坐标原点,x0,y0,z0轴分别指向正北、正东、地心,载体坐标系(oxyz)以船体质心为坐标原点,x轴沿船首方向,y轴垂直于x轴沿船体右侧,z轴垂直于xoy平面指向地心;式中,x0,y0,z0是惯性坐标系下无人船的位置,θ,ψ为载体坐标系下的欧拉角,可以由
船载的rtk和ins组合导航仪测得的线速度和角速度积分计算出,无人船运动状态在两种坐标系下的转换关系如下所示:标系下的转换关系如下所示:标系下的转换关系如下所示:标系下的转换关系如下所示:式中,u,v,w是线速度的测量值,z
p
,z
q
,z
r
是角速率测量值,t
v
,t
a
是转换矩阵,联立等式2-5可得等式6;5可得等式6;5可得等式6;5可得等式6;5可得等式6;5可得等式6;。5.根据权利要求4所述的一种无人船自主巡航方法,其特征在于,所述无人船通过级联无人船的状态向量x
v
和地图参数向量x
m
来拓展状态向量x,以达到同时估计无人船的运动状态以及环境中的障碍物信息的目的:其中x
mi
表示第i个障碍物平面结构的地图参数,该地图参数向量的维度随检测到的平面曲面的数量而增加,最终,无人船的系统运动学方程可以由等式8表示,其中z
dr
为船载感知系统的测量值,联立等式6可得f(x
v
,z
dr
),w为零均值的高斯白噪声;再利用船载传感器的观测信息来推断无人船的位置,测距传感器的观测量z是某个环境特征相对于传感器的位置和角度信息,系统的测量方程表示如下:
式中,d
x
和d
y
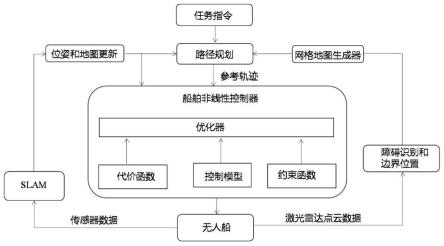
表示无人船与当前观测地标之间的相对位置,γ表示无人船航向角;e是转换矩阵,v是测量噪声。6.用于权利要求1的一种无人船自主巡航控制系统,包括无人船,其特征在于,所述无人船上设有船载传感器部、slam系统以及无人船主控系统,所述无人船主控系统连接有控制终端,所述无人船主控系统与所述slam系统连通,所述无人船主控系统内设有船舶非线性控制器,所述船舶非线性控制器内设有线路优化器,所述线路优化器内设有代价函数模块、控制模型、约束函数模块。7.根据权利要求6所述的一种无人船自主巡航控制系统,其特征在于,所述传感器部包括激光雷达、惯性和卫星组合导航模块、摄像头、毫米波雷达,所述激光雷达包括机械激光雷达和固态激光雷达,所述机械激光雷达通过网格地图生成器与所述船载主控系统连通。
技术总结
一种无人船自主巡航控制系统及巡航方法。本发明公开了一种无人船自主巡航方法,包括以下步骤:S1、船载SLAM系统通过无人船上传感器采集数据并处理生成无人船的位姿和地图构建更新,激光雷达生成点云数据并处理对无人船周围的障碍识别和边界位姿识别,进行生成网格地图;S2、无人船接收巡航指令;S3、无人船主控系统根据巡航指令、位姿和地图进行线路规划,并形成参考巡航路径;S4、无人船根据参考巡航路径开始进行巡航,巡航的过程中,通过无人船非线性控制器对无人船动力模型的最优解进行求解;S5、根据无人船动力模型的最优解以及参考巡航路径来修正无人船的实际航向,本发明能够对无人船的实际航向进行优化控制,使得无人船的实际航行路径更加贴近有规划的循环路径。的实际航行路径更加贴近有规划的循环路径。的实际航行路径更加贴近有规划的循环路径。
技术研发人员:余道洋 李梁 刘锦淮
受保护的技术使用者:中国科学院合肥物质科学研究院
技术研发日:2022.05.25
技术公布日:2022/9/2
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。