1.本发明涉及风机叶片除冰技术领域,具体为一种基于目标跟随的风机叶片移动式激光除冰装置及方法。
背景技术:
2.风能作为新能源的重要组成部分,在我国得到了大力发展。风机多安装在高原、山区或沿海地带。当环境温度低于0摄氏度的情况下,遇到潮湿空气,风电机组很容易发生结冰现象。尤其是风机叶片覆冰后会存在较大危害。其一,覆冰会增大叶片载荷或载荷不均匀,影响叶片寿命。其二,覆冰会影响叶片翼型,降低风电机组出力和发电效率。因此在风机运行过程中,需要即时去除风机叶片结冰。
3.风机叶片除冰的方法分为主动型和被动型。主动型一般是通过某些方法来防止积冰的产生,常见的有热能防冰与涂料防冰。热能防冰是利用一些装置提供热能来加热物件表面,使物件表面温度超过冰熔点,从而达到防除冰的效果,热能防冰分为电热防冰和热风防冰。缺点是功耗高,电热丝加热在雷雨天气叶片容易遭受雷电袭击。涂料防冰问题是除冰不彻底,涂层易脱落,不环保。
4.被动型是指待叶片覆冰到一定程度时,通过物理或化学方法将冰除去。该方法通常包括溶液除冰、机械除冰。溶液除冰通常是将融冰液体喷洒在已结冰的表面,使冰层逐渐融化。其缺点是有效作用时间短,是一种短期防冰方法;用量大;在严重结冰状况下除冰的效果差。机械除冰一般是通过人工利用工具将冰除碎,然后利用离心力振动,或气流吹除等方法把冰除去。该方法除冰简捷彻底,但是需要耗费大量的人力。人工除冰还需要部分停机,在损失发电量的同时还可能存在实施人员的人身安全隐患。
技术实现要素:
5.针对现有技术中存在的问题,本发明提供一种基于目标跟随的风机叶片移动式激光除冰装置及方法。
6.本发明是通过以下技术方案来实现:
7.一种基于目标跟随的风机叶片移动式激光除冰装置,包括移动平台、多自由度摇摆平台、激光加热器、激光测距仪、高清摄像头和数据处理工作站,所述多自由度摇摆平台和高清摄像头设置于移动平台上,所述激光加热器和激光测距仪均设置于多自由度摇摆平台上,所述高清摄像头的输出端和激光测距仪的输出端均与数据处理工作站的输入端连接,所述数据处理工作站的输出端与多自由度摇摆平台的控制输入端连接。
8.优选的,所述多自由组摇摆平台包括多个电动缸和支撑平台,多个所述电动缸转动设置于移动平台上,所述支撑平台转动设置于电动缸的活动端,所述高清摄像头、红外测温仪和激光测距仪均设置于支撑平台上。
9.优选的,多个所述电动缸以首尾相连的并联形式布置。
10.优选的,还包括设置于支撑平台上的红外测温仪,所述红外测温仪的输出端与数
据处理工作站的输入端连接。
11.优选的,所述数据处理工作站配置有gpu图像加速卡。
12.一种基于目标跟随的风机叶片移动式激光除冰方法,采用基于目标跟随的风机叶片移动式激光除冰装置,包括以下步骤:
13.s1,利用高清摄像头获取风机的图像数据并传递至数据处理工作站;
14.s2,数据处理工作站标定风机叶片结冰位置的空间坐标;
15.s3,根据风机叶片结冰位置的空间坐标标定风机加热区域的坐标;
16.s4,根据风机加热区域的坐标获取激光加热器的位置坐标;;
17.s5,根据激光加热器的位置坐标计算多自由度摇摆平台的姿态,使得激光加热器的输出端对准风机叶片结冰位置;
18.s6,打开激光加热器加热风机叶片结冰位置。
19.优选的,在s2中,标定风机叶片结冰位置的空间坐标时采用图像语义分割算法和目标重识别算法。
20.优选的,在s3中,标定风机加热区域的坐标时采用仿射变换算法。
21.优选的,在s5中,多自由度摇摆平台的姿态包括转动角度和升降高度,升降高度依据电动缸的控制量实现调整。
22.与现有技术相比,本发明具有以下有益效果:
23.本发明一种基于目标跟随的风机叶片移动式激光除冰装置可在风机不停机状态下,使用中低功率激光器对风机叶片指定位置持续加热,达到风机叶片即时除冰的效果。
24.移动平台可根据风机在运行状态下的朝向及地形将整体除冰装置尽量移动至风机正前方或正后方,有助于最大化可工作区域。
25.激光加热器用于对风机叶片指定位置进行加热,采用中低功率激光远程加热装置,具有体积小,加热聚焦点加热适中,不易灼伤风机叶片表面涂层的特点。
26.多自由度摇摆平台可带动负载设备实现上下俯仰、左右摇摆和扭转等多角度转动变换。
27.激光测距仪用于精确测量设备与风机指定位置的空间直线距离。摄像头用于对风机某叶片进行目标跟踪和目标重识别,并根据加热点坐标计算结果,控制多自由度摇摆台,控制激光加热器对指定区域点持续加热。
28.进一步的,红外测温仪用于对指定加热区域进行实时测温,具有监控加热效果。
29.进一步的,图形处理工作站配置gpu图像加速卡,对目标跟踪及重识别算法推理程序进行计算加速,以便达到实时处理效果。
30.本发明一种基于目标跟随的风机叶片移动式激光除冰方法属于被动型热能除冰法,基于计算机视觉目标跟随算法对风机叶片的结冰位置进行加热,加热过程中不需要停机,也不需风机叶片预埋加热丝或加热管线,具有成本低,响应快、安全隐患低的特点。
附图说明
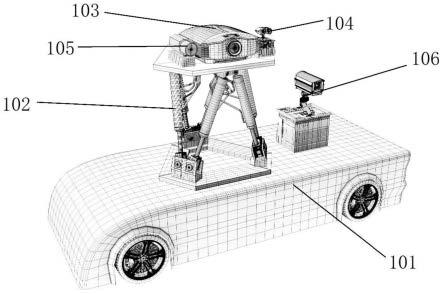
31.图1为本发明一种基于目标跟随的风机叶片移动式激光除冰装置的示意图;
32.图2为本发明一种基于目标跟随的风机叶片移动式激光除冰方法的流程图;
33.图3为本发明一种基于目标跟随的风机叶片移动式激光除冰方法的数据处理流程
图。
34.图中,101、移动平台;102、多自由度摇摆平台;103、激光加热器;104、红外测温仪;105、激光测距仪;106、高清摄像头。
具体实施方式
35.下面结合具体的实施例对本发明做进一步的详细说明,所述是对本发明的解释而不是限定。
36.本发明公开了一种基于目标跟随的风机叶片移动式激光除冰装置,参照图1,包括移动平台101、多自由度摇摆平台102、激光加热器103、激光测距仪105、高清摄像头106和数据处理工作站,多自由度摇摆平台102和高清摄像头设置于移动平台101上,多自由组摇摆平台包括多个电动缸和支撑平台,多个电动缸以首尾相连的并联形式转动布置于移动平台101上,支撑平台转动设置于电动缸的活动端,高清摄像头106、红外测温仪104和激光测距仪105均设置于支撑平台上。
37.高清摄像头的输出端和激光测距仪105的输出端均与数据处理工作站的输入端连接,数据处理工作站的输出端与多自由度摇摆平台102的控制输入端连接。
38.支撑平台上还设有红外测温仪104,红外测温仪104的输出端与数据处理工作站的输入端连接。
39.数据处理工作站配置有gpu图像加速卡。
40.本发明还公开了一种基于目标跟随的风机叶片移动式激光除冰方法,参照图2、3,包括以下步骤:
41.s1,利用高清摄像头获取风机的图像数据并传递至数据处理工作站;
42.s2,数据处理工作站采用图像语义分割算法和目标重识别算法标定风机叶片结冰位置的空间坐标;
43.s3,根据风机叶片结冰位置的空间坐标采用仿射变换算法标定风机加热区域的坐标;
44.s4,根据风机加热区域的坐标获取激光加热器103的位置坐标;;
45.s5,根据激光加热器103的位置坐标计算多自由度摇摆平台102的姿态,多自由度摇摆平台102的姿态包括转动角度和升降高度,升降高度依据电动缸的控制量实现调整,使得激光加热器103的输出端对准风机叶片结冰位置;
46.s6,打开激光加热器103加热风机叶片结冰位置。
47.实施例
48.移动平台101为轮式车载平台,根据待除冰风机朝向及地形特征,通过牵引机构将整体除冰装置移动至风机正前方或正后方。高清摄像头106放置在移动平台101上方,用于实时捕捉风机运行图像,通过图像语义分割算法和目标重识别算法,在图像中定位叶片区域,根据图像中加热区域像素坐标转换为空间坐标,控制多自由度摇摆台102进行转动,带动激光加热器103对指定位置进行激光加热。
49.以上所述的仅仅是本发明的较佳实施例,并不用以对本发明的技术方案进行任何限制,本领域技术人员应当理解的是,在不脱离本发明精神和原则的前提下,该技术方案还可以进行若干简单的修改和替换,这些修改和替换也均属于权利要求书所涵盖的保护范围
之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。