1.本发明涉及一种安全技术领域,特别是涉及一种地质测绘数据管理工作。
背景技术:
2.对地质进行调查时,通常需要使用取样装置对地层进行钻孔,随后取出土芯进行检验,专利申请号2021113763025,名称为“一种地质调查用浅层弱扰动取样装置”,公开了包括竖直设置的钻孔外筒;钻孔外筒内同轴设置有取样内筒;钻孔外筒上端同轴固定连通有支撑轴管;取样内筒上端同轴固定连通有定位轴管;定位轴管从支撑轴管内伸出;支撑轴管和定位轴管均与安装框架机构连接;钻孔外筒外壁分布有螺旋叶片;钻孔外筒下端同轴设置有钻进刀头;钻进刀头与钻孔外筒之间通过紧固螺钉连接;钻进刀头内径与取样内筒内径一致;钻孔外筒内壁设置有用于支撑取样内筒的辅助支撑机构。该发明的有益效果是:其能够减小对土芯的土层结构造成的破坏,提高土芯的完整度,同时取芯方便。
技术实现要素:
3.本发明旨在至少解决现有技术中存在的技术问题,特别创新地提出了一种地质测绘数据管理工作方法。
4.为了实现本发明的上述目的,本发明提供了一种地质测绘数据管理工作系统,包括支撑底板,在支撑底板上设置有一对竖向支撑杆,分别为第一竖向支撑杆和第二竖向支撑杆,还包括支撑底板,在支撑顶板上设置有一对贯穿支撑顶板的顶板贯穿孔,分别为第一顶板贯穿孔和第二顶板贯穿孔,第一顶板贯穿孔与第二顶板贯穿孔间的距离等于第一竖向支撑杆与第二竖向支撑杆间的距离,使其一对竖向支撑杆能够同时通过支撑顶板上的一对贯穿孔,实现人工操作的上下升降;
5.在支撑顶板上设置有用于驱动电机的旋转动力轴通过的第一贯穿孔,第一贯穿孔位于第一顶板贯穿孔与第二顶板贯穿孔连线之间,在支撑顶板上设置有用于固定安装驱动电机的驱动电机固定安装座,驱动电机固定安装在驱动电机固定安装座上,驱动电机的工作控制端与控制器的电机工作控制端相连,驱动电机的旋转动力轴通过第一贯穿孔延伸到支撑顶板的下端,在驱动电机的旋转动力轴末端设置有与旋转动力轴连接的钻体;在支撑底板上还设置有用于钻体穿过的钻体贯穿孔,钻体贯穿孔位于第一竖向支撑杆和第二竖向支撑杆连线间,且钻体贯穿孔处于钻体的正下方;
6.在支撑顶板上设置有一对把手,分别为左把手和右把手,在支撑顶板的底面设置有用于固定安装红外接收器的红外接收器固定安装座,红外接收器固定安装在红外接收器固定安装座上,红外接收器的红外数据输出端与控制器的红外数据输入端相连,在支撑底板的顶面设置有用于固定安装红外发射器的红外发射器固定安装座,红外发射器固定安装在红外发射器固定安装座上,红外发射器的红外发射控制端与控制器的红外发射控制端相连,红外发射器设置在红外接收器的正下方,使其红外接收器能够正好接收到红外发射器发射的红外线;或者在支撑顶板的底面设置有用于固定安装红外发射器的红外发射器固定
安装座,红外发射器固定安装在红外发射器固定安装座上,红外发射器的红外发射控制端与控制器的红外发射控制端相连,在支撑底板的顶面设置有用于固定安装红外接收器的红外接收器固定安装座,红外接收器固定安装在红外接收器固定安装座上,红外接收器的红外数据输出端与控制器的红外数据输入端相连,红外接收器设置在红外发射器的正下方,使其红外接收器能够正好接收到红外发射器发射的红外线。
7.在本发明的一种优选实施方式中,在左把手上设置有防滑凸起一,右把手上设置有防凸起二,通过防滑凸起一和防滑凸起二可以防止工作人员手持把手时打滑。
8.在本发明的一种优选实施方式中,钻体包括钻杆,在钻杆杆身上设置有刻度线;可以直接读取杆身的刻度线,粗略的判断钻杆钻入深度。
9.或/和在钻杆杆身上设置有螺旋叶片;利用螺旋叶片可以将钻洞中的岩土输送到地表面。
10.或/和在支撑底板上设置有一对贯穿支撑底板的贯穿孔,分别为第一底板贯穿孔和第二底板贯穿孔,在第一竖向支撑杆的末端轴向设置有螺纹孔一,在第二竖向支撑杆的末端轴向设置有螺纹孔二,还包括与螺纹孔一相适配的螺纹栓一和与螺纹孔二相适配的螺纹栓二,螺纹栓一通过第一底板贯穿孔后与第一竖向支撑杆的末端上的螺纹孔一相旋紧,螺纹栓二通过第二底板贯穿孔后与第二竖向支撑杆的末端上的螺纹孔二相旋紧;
11.或/和在支撑底板顶面设置有用于固定安装气泡水平仪的气泡水平仪固定安装座,气泡水平仪固定安装在气泡水平仪固定安装座上;便于判断支撑底板是否放平,实现钻杆竖直下钻,防止钻杆打偏。
12.或/和在钻杆的末端设置有钻头,钻杆的另一末端通过联轴器与驱动电机的旋转动力轴连接。通过联轴器便于将钻杆与旋转动力轴连接起来。
13.在本发明的一种优选实施方式中,在第一竖向支撑杆上套装有弹簧一,第二竖向支撑杆上套装有弹簧二,利用弹簧一和弹簧二实现缓冲限位。
14.在本发明的一种优选实施方式中,驱动电机包括驱动电机本体,还包括在驱动电机本体上设置有显示屏和按键组,显示屏的显示数据端与控制器的显示数据端相连,按键组的按键数据端与控制器的按键数据端相连,通过按键组上的按键实现对驱动电机解除锁定。通过显示屏可以显示钻孔钻入深度、位置、当前时间等信息。按键组包括数字按键组和功能按键组,数字按键组包括第1数字按键、第2数字按键、第3数字按键、第4数字按键、第5数字按键、第6数字按键、第7数字按键、第8数字按键、第9数字按键和第10数字按键,功能按键组包括确定按键、退格按键、取消按键、第1功能按键m1和第2功能按键m2、第3功能按键m3;每个数字按键可以显示数字0到9中的一个数字且每个数字按键显示的数字不同,假如第1数字按键显示的是数字0,第2数字按键显示的是数字1,第3数字按键显示的是数字2,第4数字按键显示的是数字3,第5数字按键显示的是数字4,第6数字按键显示的是数字5,第7数字按键显示的是数字6,第8数字按键显示的是数字7,第9数字按键显示的是数字8,第10数字按键显示的是数字9,按了一下第1数字按键则表示将数字0输入;在这种显示情况下,按了一下第5数字按键则表示将数字4输入,同样在这种显示情况下,按了一下第5数字按键则表示将数字4输入,
……
;假如第1数字按键显示的是数字9,第2数字按键显示的是数字8,第3数字按键显示的是数字7,第4数字按键显示的是数字6,第5数字按键显示的是数字5,第6数字按键显示的是数字4,第7数字按键显示的是数字3,第8数字按键显示的是数2,第9数
字按键显示的是数字1,第10数字按键显示的是数字0,按了一下第1数字按键则表示将数字9输入;在这种显示情况下,按了一下第5数字按键则表示将数字5输入,同样在这种显示情况下,按了一下第5数字按键则表示将数字5输入,
……
;假如第1数字按键显示的是数字1,第2数字按键显示的是数字4,第3数字按键显示的是数字7,第4数字按键显示的是数字2,第5数字按键显示的是数字5,第6数字按键显示的是数字8,第7数字按键显示的是数字0,第8数字按键显示的是数字3,第9数字按键显示的是数字6,第10数字按键显示的是数字9,按了一下第1数字按键则表示将数字1输入;在这种显示情况下,按了一下第5数字按键则表示将数字5输入,同样在这种显示情况下,按了一下第5数字按键则表示将数字5输入,
……
。其按了一下确定按键则表示确定,按了一下退格按键则表示向前消除一位数字,按了一下取消按键则表示取消密码输入回到主界面,按了一下第1功能按键m1则表示进入输入密码界面,按了一下第2功能按键m2则表示菜单列表界面,按了一下第3功能按键m3则表示在列表中向下移动至下一功能(该功能可以是亮度、对比度、语言等等),在实际操作中,存在按键功能的互斥,例如在进入输入密码界面后,即使按了一下第2功能按键m2或第2功能按键m2不会有反应,需首先在主界面时按了一下第2功能按键m2即进入菜单列表界面,再进行对应的操作,在主界面的情况下,按了一下第1数字按键或第2数字按键或第3数字按键或第4数字按键或第5数字按键或第6数字按键或第7数字按键或第8数字按键或第9数字按键或第10数字按键或确定按键或退格按键或取消按键或第1功能按键m1或第2功能按键m2不会有反应。
15.在本发明的一种优选实施方式中,还包括在左把手上设置有用于固定安装启动按键一的启动按键一固定安装座,启动按键一固定安装在启动按键一固定安装座上,启动按键一的输出端与逻辑判断模块的输入第一端相连;在右把手上设置有用于固定安装启动按键二的启动按键二固定安装座,启动按键二固定安装在启动按键二固定安装座上,启动按键二的输出端与逻辑判断模块的输入第二端相连;逻辑判断模块的输出端与控制器的启动输入端相连;逻辑判断模块包括:第一npn三极管的基极与启动按键一的输出端相连,启动按键一的输入端与 3.0v电源相连,第一npn三极管的发射极分别与第一电阻的第一端和与门的输入第一端相连,第一电阻的第二端与电源地相连,第一npn三极管的集电极与第二电阻的第一端相连,第二电阻的第二端与 5.0v电源相连;第二npn三极管的基极与启动按键二的输出端相连,启动按键二的输入端与 3.0v电源相连,第二npn三极管的发射极分别与第三电阻的第一端和与门的输入第二端相连,第三电阻的第二端与电源地相连,第二npn三极管的集电极与第四电阻的第一端相连,第四电阻的第二端与 5.0v电源相连;与门的输出端与控制器的启动输入端相连。当同时按下启动按键一和启动按键二时,将 3.0v电源通向第一npn三极管的基极和第二npn三极管的基极,此时第一npn三极管和第二npn三极管处于导通状态,输入与门的输入第一端和与门的输入第二端均由低电平变为高电平,与门输出高电平,若只按下启动按键一,不按下启动按键二时,此时第一npn三极管处于导通状态,第二npn三极管处于截止状态,输入与门的输入第一端由低电平变为高电平,输入与门的输入第二端仍为低电平,与门输出低电平;同理,若只按下启动按键二,不按下启动按键一时,此时第二npn三极管处于导通状态,第一npn三极管处于截止状态,输入与门的输入第二端由低电平变为高电平,输入与门的输入第一端为低电平,与门输出低电平;对应的,若均不按住启动按键一和启动按键二时,此时第一npn三极管和第二npn三极管处于截止状态,输入与门的输入第一端和输入与门的输入第二端为低电平,与门输出低电平。
16.当同时触发启动按键一和启动按键二,逻辑判断模块向控制器输入启动信号,控制器接收到逻辑判断模块输入的启动信号后,控制器向驱动电机发送工作控制命令,驱动电机工作。利用启动按键一和启动按键二的同时按压实现工作过程中的安全,保护人身安全。
17.在本发明的一种优选实施方式中,还包括定位模块,定位模块的定位数据端与控制器的定位数据端相连。实现对取样位置进行定位。
18.在本发明的一种优选实施方式中,定位模块包括gps定位模块、agps定位模块、glonass定位模块、北斗定位模块之一或者任意组合;
19.定位模块为gps定位模块时,gps定位模块的定位数据端与控制器的定位数据gps端相连;
20.定位模块为agps定位模块时,agps定位模块的定位数据端与控制器的定位数据agps端相连;
21.定位模块为glonass定位模块时,glonass定位模块的定位数据端与控制器的定位数据glonass端相连;
22.定位模块为北斗定位模块时,北斗定位模块的定位数据端与控制器的定位数据北斗端相连。
23.在本发明的一种优选实施方式中,还包括无线通讯模块,无线通讯模块的通讯端与控制器的通讯端相连。实现无线数据交互。
24.在本发明的一种优选实施方式中,无线通讯模块包括无线通讯3g模块、无线通讯4g模块、无线通讯5g模块、无线通讯lora模块、无线通讯nb-iot模块之一或者任意组合;
25.无线通讯模块为无线通讯3g模块时,无线通讯3g模块的通讯端与控制器的通讯3g端相连;
26.无线通讯模块为无线通讯4g模块时,无线通讯4g模块的通讯端与控制器的通讯4g端相连;
27.无线通讯模块为无线通讯5g模块时,无线通讯5g模块的通讯端与控制器的通讯5g端相连;
28.无线通讯模块为无线通讯lora模块时,无线通讯lora模块的通讯端与控制器的通讯lora端相连;
29.无线通讯模块为无线通讯nb-iot模块时,无线通讯nb-iot模块的通讯端与控制器的通讯nb-iot端相连。
30.本发明还公开了一种地质测绘数据管理工作系统的工作方法,包括以下步骤:
31.s1,系统组装完成;
32.s2,对钻机进行解除钻机锁定;
33.s3,钻机启动钻洞取样;
34.s4,对不同深度样品进行数据测量。
35.在本发明的一种优选实施方式中,在步骤s1中包括以下步骤:
36.s11,利用螺纹栓一通过第一底板贯穿孔后与第一竖向支撑杆的末端上的螺纹孔一相旋紧,螺纹栓二通过第二底板贯穿孔后与第二竖向支撑杆的末端上的螺纹孔二相旋紧;
37.s12,将弹簧一套装在第一竖向支撑杆上,将弹簧二套装在第二竖向支撑杆上;
38.s13,将驱动电机固定安装在驱动电机固定安装座上,并使其驱动电机的旋转动力轴通过第一贯穿孔延伸到支撑顶板的下端,再利用联轴器将驱动电机的旋转动力轴与钻体固定连接;
39.s14,第一竖向支撑杆和第二竖向支撑杆通过支撑顶板上的第一顶板贯穿孔和第二顶板贯穿孔;此时监测系统组装完成。
40.在本发明的一种优选实施方式中,在步骤s2中包括以下步骤:
41.s21,控制器判断是否接收到解除钻机锁定触发控制命令信号:
42.若控制器接收到解除钻机锁定触发控制命令信号,则执行下一步;
43.若控制器未接收到解除钻机锁定触发控制命令信号,则继续等待,返回步骤s21;
44.s22,获取定位模块获取的位置信息,记作pos;获取触发解除钻机锁定触发控制命令信号的时刻,记作tim;以及获取无线通讯模块的id号,记作comid;
45.s23,将步骤s22中获取得到的位置信息pos、时刻tim和id号comid与数字0~9相融合,得到其融合信息;得到融合信息的计算方法为:
46.merj=pos&tim&comid&numj,
47.其中,pos表示定位模块获取到的位置信息;
48.tim表示触发解除钻机锁定触发控制命令信号时的时刻;
49.comid表示无线通讯模块的id号;
50.merj表示第j融合信息;
51.&表示连合符号;
52.numj表示数字0~9中的第j数字,j=0、1、2、3、
……
、9;
53.num0表示数字0~9中的第0数字,即是num0=0;
54.num1表示数字0~9中的第1数字,即是num1=1;
55.num2表示数字0~9中的第2数字,即是num2=2;
56.num3表示数字0~9中的第3数字,即是num3=3;
57.num4表示数字0~9中的第4数字,即是num4=4;
58.num5表示数字0~9中的第5数字,即是num5=5;
59.num6表示数字0~9中的第6数字,即是num6=6;
60.num7表示数字0~9中的第7数字,即是num7=7;
61.num8表示数字0~9中的第8数字,即是num8=8;
62.num9表示数字0~9中的第9数字,即是num9=9;
63.s24,将步骤s23中得到的融合信息进行计算,得到大小码;大小码的计算方法为:
64.sj=measurementcodeoperationfunction(merj),
65.merj表示第j融合信息;
66.measurementcodeoperationfunction()表示大小码运算函数;
67.sj表示第j大小码;
68.将j个大小码按照从大到小的顺序依次排列,j表示数字0~9中数字的个数,排列后将大小码对应大小码所对应的数字,将数字依次显示在按键组上;
69.s25,控制器判断是否接收到输入数字0~9之一触发控制命令信号:
70.若控制器接收到输入数字0~9之一触发控制命令信号,则执行下一步;
71.若控制器未接收到输入数字0~9之一触发控制命令信号,则继续等待,返回步骤s25;
72.s26,获取触发输入数字0~9之一触发控制命令信号的时刻,记作tim
′
;
73.s27,将步骤s22中获取得到的位置信息pos、id号comid和步骤s26中的时刻tim
′
与数字0~9相融合,得到其融合触发信息;得到融合触发信息的计算方法为:
74.merj′
=pos&tim
′
&comid&numj,
75.其中,pos表示定位模块获取到的位置信息;
76.tim
′
表示触发输入数字0~9之一触发控制命令信号时的时刻;
77.comid表示无线通讯模块的id号;
78.merj′
表示第j融合触发信息;
79.&表示连合符号;
80.numj表示数字0~9中的第j数字,j=0、1、2、3、
……
、9;
81.num0表示数字0~9中的第0数字,即是num0=0;
82.num1表示数字0~9中的第1数字,即是num1=1;
83.num2表示数字0~9中的第2数字,即是num2=2;
84.num3表示数字0~9中的第3数字,即是num3=3;
85.num4表示数字0~9中的第4数字,即是num4=4;
86.num5表示数字0~9中的第5数字,即是num5=5;
87.num6表示数字0~9中的第6数字,即是num6=6;
88.num7表示数字0~9中的第7数字,即是num7=7;
89.num8表示数字0~9中的第8数字,即是num8=8;
90.num9表示数字0~9中的第9数字,即是num9=9;
91.s28,将步骤s27中得到的融合触发信息进行计算,得到大小触发码;大小触发码的计算方法为:
92.sj′
=measurementcodeoperationfunction(merj′
),
93.merj′
表示第j融合触发信息;
94.measurementcodeoperationfunction()表示大小码运算函数;
95.sj′
表示第j大小触发码;
96.将j个大小触发码按照从大到小的顺序依次排列,j表示数字0~9中数字的个数,排列后将大小触发码对应大小触发码所对应的数字,将数字依次显示在按键组上;
97.s29,控制器判断是否接收到输入数字0~9之一触发控制命令信号:
98.若控制器接收到输入数字0~9之一触发控制命令信号,则判断输入的解除钻机锁定的密码位数是否达到预设位数阈值:
99.若输入的解除钻机锁定的密码位数达到预设位数阈值,则判断输入的解除钻机锁定的密码与预设密码是否一致:
100.若输入的解除钻机锁定的密码与预设密码一致,则解除钻机锁定;
101.若输入的解除钻机锁定的密码与预设密码不一致,则不解除钻机锁定,将之前输入的解除钻机锁定的密码清楚,返回步骤s25;
102.若控制器未接收到输入数字0~9之一触发控制命令信号,则继续等待,返回步骤s29。
103.在本发明的一种优选实施方式中,在步骤s3中包括以下步骤:
104.s30,双手扶着左把手和右把手,并同时按下启动按键一和启动按键二,此时控制器接收到逻辑判断模块输出的高电平,控制器接收到高电平后,控制器向驱动电机发送工作控制信号,驱动电机旋转;
105.s31,控制器每隔t0ns向红外发射器发送发射红外控制命令信号,ns表示时间单位纳秒,t0为大于0的正数,红外发射器接收到控制器发送的发射红外控制命令信号后,红外发射器发出红外线;计算钻机钻入地面的距离,其钻机钻入地面的距离的计算方法为:
106.d=d
0-h-l,
107.其中,h表示支撑顶板与支撑底板间的距离值;
108.d0表示钻头至支撑顶板间的距离值;
109.d表示钻机钻入地面的距离值;
110.l表示支撑底板厚度;
111.h=(1-η)c*(t
n,rx-t
n,tx
)(1-λ),
112.c表示红外线的速度;
113.t
n,rx
表示红外接收器第n次接收到红外发射器发射的红外线时的时刻;
114.t
n,tx
表示红外发射器第n次发射红外线时的时刻;
115.η表示介质传播误差系数,表示万分之一;
116.λ表示时间误差系数,表示万分之一;
117.s32,控制器判断是否接收到逻辑判断模块输入的启动信号:
118.若控制器接收到逻辑判断模块输入的启动信号,则控制器向驱动电机发送工作信号,驱动电机带动钻头转动;
119.若控制器未接收到逻辑判断模块输入的启动信号,则返回步骤s32;
120.s33,判断钻机钻入地面的距离是否达到预设距离阈值:
121.若钻机钻入地面的距离达到预设距离阈值,则控制器向其驱动电机发送停止信号,驱动电机停止工作;
122.若钻机钻入地面的距离未达到预设距离阈值,则驱动电机继续工作,返回步骤s33。
123.综上所述,由于采用了上述技术方案,本发明能够对不同深度的地质进行采样,实现数据展现。
124.本发明的附加方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本发明的实践了解到。
附图说明
125.本发明的上述和/或附加的方面和优点从结合下面附图对实施例的描述中将变得明显和容易理解,其中:
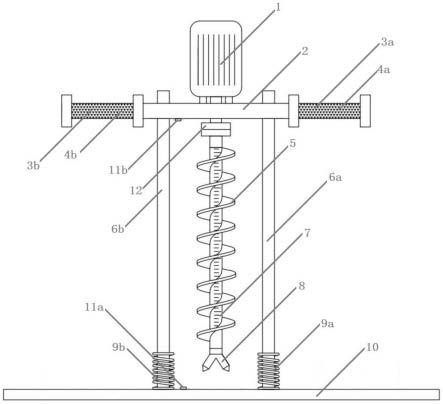
126.图1是本发明结构示意图。
127.图2是本发明结构示意图。
128.图3是本发明解除钻机锁定展示示意图。
129.图4是本发明解除钻机锁定展示示意图。
130.图5是本发明解除钻机锁定展示示意图。
131.图6是本发明解除钻机锁定展示示意图。
132.图7是本发明解除钻机锁定展示示意图。
133.图8是本发明解除钻机锁定展示示意图。
134.图9是本发明解除钻机锁定展示示意图。
135.图10是本发明解除钻机锁定展示示意图。
136.图11是本发明解除钻机锁定展示示意图。
137.图12是本发明解除钻机锁定展示示意图。
138.图13是本发明解除钻机锁定展示示意图。
139.图14是本发明解除钻机锁定展示示意图。
140.图15是本发明解除钻机锁定展示示意图。
141.图16是本发明流程示意框图。
具体实施方式
142.下面详细描述本发明的实施例,所述实施例的示例在附图中示出,其中自始至终相同或类似的标号表示相同或类似的元件或具有相同或类似功能的元件。下面通过参考附图描述的实施例是示例性的,仅用于解释本发明,而不能理解为对本发明的限制。
143.本发明提供了一种地质测绘数据管理工作系统,如图1~2所示,包括支撑底板10,在支撑底板10上设置有一对竖向支撑杆,分别为第一竖向支撑杆6a和第二竖向支撑杆6b,还包括支撑底板2,在支撑顶板2上设置有一对贯穿支撑顶板2的顶板贯穿孔,分别为第一顶板贯穿孔和第二顶板贯穿孔,第一顶板贯穿孔与第二顶板贯穿孔间的距离等于第一竖向支撑杆6a与第二竖向支撑杆6b间的距离,使其一对竖向支撑杆能够同时通过支撑顶板2上的一对贯穿孔,实现人工操作的上下升降;
144.在支撑顶板2上设置有用于驱动电机1的旋转动力轴通过的第一贯穿孔,第一贯穿孔位于第一顶板贯穿孔与第二顶板贯穿孔连线之间,在支撑顶板2上设置有用于固定安装驱动电机1的驱动电机固定安装座,驱动电机1固定安装在驱动电机固定安装座上,驱动电机1的工作控制端与控制器的电机工作控制端相连,驱动电机1的旋转动力轴通过第一贯穿孔延伸到支撑顶板2的下端,在驱动电机1的旋转动力轴末端设置有与旋转动力轴连接的钻体;在支撑底板10上还设置有用于钻体穿过的钻体贯穿孔,钻体贯穿孔位于第一竖向支撑杆6a和第二竖向支撑杆6b连线间,且钻体贯穿孔处于钻体的正下方;
145.在支撑顶板2上设置有一对把手,分别为左把手4b和右把手4a,在支撑顶板2的底面设置有用于固定安装红外接收器11b的红外接收器固定安装座,红外接收器11b固定安装在红外接收器固定安装座上,红外接收器11b的红外数据输出端与控制器的红外数据输入端相连,在支撑底板10的顶面设置有用于固定安装红外发射器11a的红外发射器固定安装座,红外发射器11a固定安装在红外发射器固定安装座上,红外发射器11a的红外发射控制端与控制器的红外发射控制端相连,红外发射器11a设置在红外接收器11b的正下方,使其红外接收器11b能够正好接收到红外发射器11a发射的红外线;或者在支撑顶板2的底面设
置有用于固定安装红外发射器11b的红外发射器固定安装座,红外发射器11b固定安装在红外发射器固定安装座上,红外发射器11b的红外发射控制端与控制器的红外发射控制端相连,在支撑底板10的顶面设置有用于固定安装红外接收器11a的红外接收器固定安装座,红外接收器11a固定安装在红外接收器固定安装座上,红外接收器11a的红外数据输出端与控制器的红外数据输入端相连,红外接收器11b设置在红外发射器11a的正下方,使其红外接收器11b能够正好接收到红外发射器11a发射的红外线。
146.在本发明的一种优选实施方式中,在左把手4b上设置有防滑凸起一3b,右把手4a上设置有防凸起二3a,通过防滑凸起一3b和防滑凸起二3a可以防止工作人员手持把手时打滑。
147.在本发明的一种优选实施方式中,钻体包括钻杆,在钻杆杆身上设置有刻度线7;可以直接读取杆身的刻度线,粗略的判断钻杆钻入深度。
148.或/和在钻杆杆身上设置有螺旋叶片;利用螺旋叶片可以将钻洞中的岩土输送到地表面。
149.或/和在支撑底板10上设置有一对贯穿支撑底板10的贯穿孔,分别为第一底板贯穿孔和第二底板贯穿孔,在第一竖向支撑杆6a的末端轴向设置有螺纹孔一,在第二竖向支撑杆6b的末端轴向设置有螺纹孔二,还包括与螺纹孔一相适配的螺纹栓一和与螺纹孔二相适配的螺纹栓二,螺纹栓一通过第一底板贯穿孔后与第一竖向支撑杆6a的末端上的螺纹孔一相旋紧,螺纹栓二通过第二底板贯穿孔后与第二竖向支撑杆6b的末端上的螺纹孔二相旋紧;
150.或/和在支撑底板10顶面设置有用于固定安装气泡水平仪15的气泡水平仪固定安装座,气泡水平仪15固定安装在气泡水平仪固定安装座上;便于判断支撑底板是否放平,实现钻杆竖直下钻,防止钻杆打偏。
151.或/和在钻杆的末端设置有钻头8,钻杆的另一末端通过联轴器与驱动电机1的旋转动力轴连接。通过联轴器便于将钻杆与旋转动力轴连接起来。
152.在本发明的一种优选实施方式中,在第一竖向支撑杆6a上套装有弹簧一9a,第二竖向支撑杆6b上套装有弹簧二9b,利用弹簧一9a和弹簧二9b实现缓冲限位。
153.在本发明的一种优选实施方式中,驱动电机1包括驱动电机本体,还包括在驱动电机本体上设置有显示屏16和按键组14,显示屏16的显示数据端与控制器的显示数据端相连,按键组14的按键数据端与控制器的按键数据端相连,通过按键组14上的按键实现对驱动电机1解除锁定。通过显示屏可以显示钻孔钻入深度、位置、当前时间等信息。按键组包括数字按键组和功能按键组,数字按键组包括第1数字按键、第2数字按键、第3数字按键、第4数字按键、第5数字按键、第6数字按键、第7数字按键、第8数字按键、第9数字按键和第10数字按键,功能按键组包括确定按键、退格按键、取消按键、第1功能按键m1和第2功能按键m2、第3功能按键m3;每个数字按键可以显示数字0到9中的一个数字且每个数字按键显示的数字不同,假如第1数字按键显示的是数字0,第2数字按键显示的是数字1,第3数字按键显示的是数字2,第4数字按键显示的是数字3,第5数字按键显示的是数字4,第6数字按键显示的是数字5,第7数字按键显示的是数字6,第8数字按键显示的是数字7,第9数字按键显示的是数字8,第10数字按键显示的是数字9,按了一下第1数字按键则表示将数字0输入;在这种显示情况下,按了一下第5数字按键则表示将数字4输入,同样在这种显示情况下,按了一下第
5数字按键则表示将数字4输入,
……
;假如第1数字按键显示的是数字9,第2数字按键显示的是数字8,第3数字按键显示的是数字7,第4数字按键显示的是数字6,第5数字按键显示的是数字5,第6数字按键显示的是数字4,第7数字按键显示的是数字3,第8数字按键显示的是数2,第9数字按键显示的是数字1,第10数字按键显示的是数字0,按了一下第1数字按键则表示将数字9输入;在这种显示情况下,按了一下第5数字按键则表示将数字5输入,同样在这种显示情况下,按了一下第5数字按键则表示将数字5输入,
……
;假如第1数字按键显示的是数字1,第2数字按键显示的是数字4,第3数字按键显示的是数字7,第4数字按键显示的是数字2,第5数字按键显示的是数字5,第6数字按键显示的是数字8,第7数字按键显示的是数字0,第8数字按键显示的是数字3,第9数字按键显示的是数字6,第10数字按键显示的是数字9,按了一下第1数字按键则表示将数字1输入;在这种显示情况下,按了一下第5数字按键则表示将数字5输入,同样在这种显示情况下,按了一下第5数字按键则表示将数字5输入,
……
。其按了一下确定按键则表示确定,按了一下退格按键则表示向前消除一位数字,按了一下取消按键则表示取消密码输入回到主界面,按了一下第1功能按键m1则表示进入输入密码界面,按了一下第2功能按键m2则表示菜单列表界面,按了一下第3功能按键m3则表示在列表中向下移动至下一功能(该功能可以是亮度、对比度、语言等等),在实际操作中,存在按键功能的互斥,例如在进入输入密码界面后,即使按了一下第2功能按键m2或第2功能按键m2不会有反应,需首先在主界面时按了一下第2功能按键m2即进入菜单列表界面,再进行对应的操作,在主界面的情况下,按了一下第1数字按键或第2数字按键或第3数字按键或第4数字按键或第5数字按键或第6数字按键或第7数字按键或第8数字按键或第9数字按键或第10数字按键或确定按键或退格按键或取消按键或第1功能按键m1或第2功能按键m2不会有反应。
154.在本发明的一种优选实施方式中,还包括在左把手4b上设置有用于固定安装启动按键一13b的启动按键一固定安装座,启动按键一13b固定安装在启动按键一固定安装座上,启动按键一13b的输出端与逻辑判断模块的输入第一端相连;在右把手4a上设置有用于固定安装启动按键二13a的启动按键二固定安装座,启动按键二13a固定安装在启动按键二固定安装座上,启动按键二13a的输出端与逻辑判断模块的输入第二端相连;逻辑判断模块的输出端与控制器的启动输入端相连;逻辑判断模块包括:第一npn三极管的基极与启动按键一13b的输出端相连,启动按键一13b的输入端与 3.0v电源相连,第一npn三极管的发射极分别与第一电阻的第一端和与门的输入第一端相连,第一电阻的第二端与电源地相连,第一npn三极管的集电极与第二电阻的第一端相连,第二电阻的第二端与 5.0v电源相连;第二npn三极管的基极与启动按键二13a的输出端相连,启动按键二13a的输入端与 3.0v电源相连,第二npn三极管的发射极分别与第三电阻的第一端和与门的输入第二端相连,第三电阻的第二端与电源地相连,第二npn三极管的集电极与第四电阻的第一端相连,第四电阻的第二端与 5.0v电源相连;与门的输出端与控制器的启动输入端相连。当同时按下启动按键一13b和启动按键二13a时,将 3.0v电源通向第一npn三极管的基极和第二npn三极管的基极,此时第一npn三极管和第二npn三极管处于导通状态,输入与门的输入第一端和与门的输入第二端均由低电平变为高电平,与门输出高电平,若只按下启动按键一13b,不按下启动按键二13a时,此时第一npn三极管处于导通状态,第二npn三极管处于截止状态,输入与门的输入第一端由低电平变为高电平,输入与门的输入第二端仍为低电平,与门输出低
电平;同理,若只按下启动按键二13a,不按下启动按键一13b时,此时第二npn三极管处于导通状态,第一npn三极管处于截止状态,输入与门的输入第二端由低电平变为高电平,输入与门的输入第一端为低电平,与门输出低电平;对应的,若均不按住启动按键一13b和启动按键二13a时,此时第一npn三极管和第二npn三极管处于截止状态,输入与门的输入第一端和输入与门的输入第二端为低电平,与门输出低电平。
155.当同时触发启动按键一13b和启动按键二13a,逻辑判断模块向控制器输入启动信号,控制器接收到逻辑判断模块输入的启动信号后,控制器向驱动电机1发送工作控制命令,驱动电机1工作。利用启动按键一13b和启动按键二13a的同时按压实现工作过程中的安全,保护人身安全。
156.在本发明的一种优选实施方式中,还包括定位模块,定位模块的定位数据端与控制器的定位数据端相连。实现对取样位置进行定位。
157.在本发明的一种优选实施方式中,定位模块包括gps定位模块、agps定位模块、glonass定位模块、北斗定位模块之一或者任意组合;
158.定位模块为gps定位模块时,gps定位模块的定位数据端与控制器的定位数据gps端相连;
159.定位模块为agps定位模块时,agps定位模块的定位数据端与控制器的定位数据agps端相连;
160.定位模块为glonass定位模块时,glonass定位模块的定位数据端与控制器的定位数据glonass端相连;
161.定位模块为北斗定位模块时,北斗定位模块的定位数据端与控制器的定位数据北斗端相连。
162.在本发明的一种优选实施方式中,还包括无线通讯模块,无线通讯模块的通讯端与控制器的通讯端相连。实现无线数据交互。
163.在本发明的一种优选实施方式中,无线通讯模块包括无线通讯3g模块、无线通讯4g模块、无线通讯5g模块、无线通讯lora模块、无线通讯nb-iot模块之一或者任意组合;
164.无线通讯模块为无线通讯3g模块时,无线通讯3g模块的通讯端与控制器的通讯3g端相连;
165.无线通讯模块为无线通讯4g模块时,无线通讯4g模块的通讯端与控制器的通讯4g端相连;
166.无线通讯模块为无线通讯5g模块时,无线通讯5g模块的通讯端与控制器的通讯5g端相连;
167.无线通讯模块为无线通讯lora模块时,无线通讯lora模块的通讯端与控制器的通讯lora端相连;
168.无线通讯模块为无线通讯nb-iot模块时,无线通讯nb-iot模块的通讯端与控制器的通讯nb-iot端相连。
169.本发明还公开了一种地质测绘数据管理工作系统的工作方法,如图16所示,包括以下步骤:
170.s1,系统组装完成;
171.s2,对钻机进行解除钻机锁定;
172.s3,钻机启动钻洞取样;
173.s4,对不同深度样品进行数据测量。数据测量包括地质的渗透系数、导水系数、释水系数、压力传导系数、越流系数、降水入渗系数、给水度、影响半径和弥散系数之一或者任意组合;将同一孔洞内的样本进行数据测量测绘展示,便于查看。
174.在本发明的一种优选实施方式中,在步骤s1中包括以下步骤:
175.s11,利用螺纹栓一通过第一底板贯穿孔后与第一竖向支撑杆6a的末端上的螺纹孔一相旋紧,螺纹栓二通过第二底板贯穿孔后与第二竖向支撑杆6b的末端上的螺纹孔二相旋紧;
176.s12,将弹簧一9a套装在第一竖向支撑杆6a上,将弹簧二9b套装在第二竖向支撑杆6b上;
177.s13,将驱动电机1固定安装在驱动电机固定安装座上,并使其驱动电机1的旋转动力轴通过第一贯穿孔延伸到支撑顶板2的下端,再利用联轴器将驱动电机1的旋转动力轴与钻体固定连接;
178.s14,第一竖向支撑杆6a和第二竖向支撑杆6b通过支撑顶板2上的第一顶板贯穿孔和第二顶板贯穿孔;此时监测系统组装完成。
179.在本发明的一种优选实施方式中,在步骤s2中包括以下步骤:
180.s21,控制器判断是否接收到解除钻机锁定触发控制命令信号:
181.若控制器接收到解除钻机锁定触发控制命令信号,则执行下一步;
182.若控制器未接收到解除钻机锁定触发控制命令信号,则继续等待,返回步骤s21;
183.s22,获取定位模块获取的位置信息,记作pos;获取触发解除钻机锁定触发控制命令信号的时刻,记作tim;以及获取无线通讯模块的id号,记作comid;
184.s23,将步骤s22中获取得到的位置信息pos、时刻tim和id号comid与数字0~9相融合,得到其融合信息;得到融合信息的计算方法为:
185.merj=pos&tim&comid&numj,
186.其中,pos表示定位模块获取到的位置信息;
187.tim表示触发解除钻机锁定触发控制命令信号时的时刻;
188.comid表示无线通讯模块的id号;
189.merj表示第j融合信息;
190.&表示连合符号;
191.numj表示数字0~9中的第j数字,j=0、1、2、3、
……
、9;
192.num0表示数字0~9中的第0数字,即是num0=0;
193.num1表示数字0~9中的第1数字,即是num1=1;
194.num2表示数字0~9中的第2数字,即是num2=2;
195.num3表示数字0~9中的第3数字,即是num3=3;
196.num4表示数字0~9中的第4数字,即是num4=4;
197.num5表示数字0~9中的第5数字,即是num5=5;
198.num6表示数字0~9中的第6数字,即是num6=6;
199.num7表示数字0~9中的第7数字,即是num7=7;
200.num8表示数字0~9中的第8数字,即是num8=8;
201.num9表示数字0~9中的第9数字,即是num9=9;
202.s24,将步骤s23中得到的融合信息进行计算,得到大小码;大小码的计算方法为:
203.sj=measurementcodeoperationfunction(merj),
204.merj表示第j融合信息;
205.measurementcodeoperationfunction()表示大小码运算函数;
206.sj表示第j大小码;
207.将j个大小码按照从大到小的顺序依次排列,j表示数字0~9中数字的个数,排列后将大小码对应大小码所对应的数字,将数字依次显示在按键组上;
208.s25,控制器判断是否接收到输入数字0~9之一触发控制命令信号:
209.若控制器接收到输入数字0~9之一触发控制命令信号,则执行下一步;
210.若控制器未接收到输入数字0~9之一触发控制命令信号,则继续等待,返回步骤s25;
211.s26,获取触发输入数字0~9之一触发控制命令信号的时刻,记作tim
′
;
212.s27,将步骤s22中获取得到的位置信息pos、id号comid和步骤s26中的时刻tim
′
与数字0~9相融合,得到其融合触发信息;得到融合触发信息的计算方法为:
213.merj′
=pos&tim
′
&comid&numj,
214.其中,pos表示定位模块获取到的位置信息;
215.tim
′
表示触发输入数字0~9之一触发控制命令信号时的时刻;
216.comid表示无线通讯模块的id号;
217.merj′
表示第j融合触发信息;
218.&表示连合符号;
219.numj表示数字0~9中的第j数字,j=0、1、2、3、
……
、9;
220.num0表示数字0~9中的第0数字,即是num0=0;
221.num1表示数字0~9中的第1数字,即是num1=1;
222.num2表示数字0~9中的第2数字,即是num2=2;
223.num3表示数字0~9中的第3数字,即是num3=3;
224.num4表示数字0~9中的第4数字,即是num4=4;
225.num5表示数字0~9中的第5数字,即是num5=5;
226.num6表示数字0~9中的第6数字,即是num6=6;
227.num7表示数字0~9中的第7数字,即是num7=7;
228.num8表示数字0~9中的第8数字,即是num8=8;
229.num9表示数字0~9中的第9数字,即是num9=9;
230.s28,将步骤s27中得到的融合触发信息进行计算,得到大小触发码;大小触发码的计算方法为:
231.sj′
=measurementcodeoperationfunction(merj′
),
232.merj′
表示第j融合触发信息;
233.measurementcodeoperationfunction()表示大小码运算函数;
234.sj′
表示第j大小触发码;
235.将j个大小触发码按照从大到小的顺序依次排列,j表示数字0~9中数字的个数,
排列后将大小触发码对应大小触发码所对应的数字,将数字依次显示在按键组上;
236.s29,控制器判断是否接收到输入数字0~9之一触发控制命令信号:
237.若控制器接收到输入数字0~9之一触发控制命令信号,则判断输入的解除钻机锁定的密码位数是否达到预设位数阈值:
238.若输入的解除钻机锁定的密码位数达到预设位数阈值,则判断输入的解除钻机锁定的密码与预设密码是否一致:
239.若输入的解除钻机锁定的密码与预设密码一致,则解除钻机锁定;
240.若输入的解除钻机锁定的密码与预设密码不一致,则不解除钻机锁定,将之前输入的解除钻机锁定的密码清楚,返回步骤s25;
241.若控制器未接收到输入数字0~9之一触发控制命令信号,则继续等待,返回步骤s29。
242.实施例1:假设预设密码为1234(一般密码长度为六位,也可以是其他的位数,在此设置的密码长度为四位)。
243.第一步,控制器接收到解除钻机锁定触发控制命令信号,显示屏上弹出解除钻机锁定密码输入框,如图3所示,此时获取到位置信息为n29
°
35
′
52.44
″
e106
°
30
′
48.78
″
(北纬29
°
35
′
52.44
″
西经106
°
30
′
48.78
″
),触发解除钻机锁定触发控制命令信号的时刻为2022年05月05日15时15分15秒15毫秒以及无线通讯模块的id号(iccid)为8986030531ab94035138。
244.第二步,将获取得到的位置信息pos=n29
°
35
′
52.44
″
e106
°
30
′
48.78
″
,触发解除钻机锁定触发控制命令信号的时刻tim=2022年05月05日15时15分15秒15毫秒以及无线通讯模块的id号comid=8986030531ab94035138与数字0~9相融合,分别得到:
245.mer0=n29
°
35
′
52.44
″
e106
°
30
′
48.78
″
2022年05月05日15时15分15秒15毫秒8986030531ab940351380;
246.mer1=n29
°
35
′
52.44
″
e106
°
30
′
48.78
″
2022年05月05日15时15分15秒15毫秒8986030531ab940351381;
247.mer2=n29
°
35
′
52.44
″
e106
°
30
′
48.78
″
2022年05月05日15时15分15秒15毫秒8986030531ab940351382;
248.mer3=n29
°
35
′
52.44
″
e106
°
30
′
48.78
″
2022年05月05日15时15分15秒15毫秒8986030531ab940351383;
249.mer4=n29
°
35
′
52.44
″
e106
°
30
′
48.78
″
2022年05月05日15时15分15秒15毫秒8986030531ab940351384;
250.mer5=n29
°
35
′
52.44
″
e106
°
30
′
48.78
″
2022年05月05日15时15分15秒15毫秒8986030531ab940351385;
251.mer6=n29
°
35
′
52.44
″
e106
°
30
′
48.78
″
2022年05月05日15时15分15秒15毫秒8986030531ab940351386;
252.mer7=n29
°
35
′
52.44
″
e106
°
30
′
48.78
″
2022年05月05日15时15分15秒15毫秒8986030531ab940351387;
253.mer8=n29
°
35
′
52.44
″
e106
°
30
′
48.78
″
2022年05月05日15时15分15秒15毫秒8986030531ab940351388;
254.mer9=n29
°
35
′
52.44
″
e106
°
30
′
48.78
″
2022年05月05日15时15分15秒15毫秒8986030531ab940351389;
255.第三步,将第二步中得到的第j融合信息进行计算,分别得到第j大小码:
[0256][0257]
measurementcodeoperationfunction()大小码运算函数,优选采用结果值为十六进制十六位的md5算法,也可以采用sha256或者sha128。
[0258][0259][0260][0261][0262][0263][0264][0265][0266][0267]
以上大小码为十六进制的数值;
[0268]
第四步,将10个大小码按照从大到小的顺序依次排列,分别得到:
[0269]s2 s
0 s
1 s
7 s
8 s
5 s
3 s
6 s
9 s4[0270]
第五步,排列后的大小码所对应的数字,分别为:
[0271]
2 0 1 7 8 5 3 6 9 4
[0272]
第六步,将数字按照从左至右从上至下依次显示在按键组上,如图3所示;
[0273]
第七步,若按了第三按键,此时控制器接收到输入数字1触发控制命令信号;
[0274]
第七步,获取到位置信息为n29
°
35
′
52.44
″
e106
°
30
′
48.78
″
,触发数字1的触发控制命令信号的时刻为2022年05月05日15时15分16秒05毫秒以及无线通讯模块的id号(iccid)为8986030531ab94035138。
[0275]
第八步,将获取得到的位置信息pos=n29
°
35
′
52.44
″
e106
°
30
′
48.78
″
,触发数字1的触发控制命令信号的时刻tim
′
=2022年05月05日15时15分16秒05毫秒以及无线通讯模块的id号comid=8986030531ab94035138与数字0~9相融合,分别得到:
[0276]
mer0′
=n29
°
35
′
52.44
″
e106
°
30
′
48.78
″
2022年05月05日15时15分16秒05毫秒8986030531ab940351380;
[0277]
mer1′
=n29
°
35
′
52.44
″
e106
°
30
′
48.78
″
2022年05月05日15时15分16秒05毫秒8986030531ab940351381;
[0278]
mer2′
=n29
°
35
′
52.44
″
e106
°
30
′
48.78
″
2022年05月05日15时15分16秒05毫秒8986030531ab940351382;
[0279]
mer3′
=n29
°
35
′
52.44
″
e106
°
30
′
48.78
″
2022年05月05日15时15分16秒05毫秒8986030531ab940351383;
[0280]
mer4′
=n29
°
35
′
52.44
″
e106
°
30
′
48.78
″
2022年05月05日15时15分16秒05毫秒8986030531ab940351384;
[0281]
mer5′
=n29
°
35
′
52.44
″
e106
°
30
′
48.78
″
2022年05月05日15时15分16秒05毫秒8986030531ab940351385;
[0282]
mer6′
=n29
°
35
′
52.44
″
e106
°
30
′
48.78
″
2022年05月05日15时15分16秒05毫秒8986030531ab940351386;
[0283]
mer7′
=n29
°
35
′
52.44
″
e106
°
30
′
48.78
″
2022年05月05日15时15分16秒05毫秒8986030531ab940351387;
[0284]
mer8′
=n29
°
35
′
52.44
″
e106
°
30
′
48.78
″
2022年05月05日15时15分16秒05毫秒8986030531ab940351388;
[0285]
mer9′
=n29
°
35
′
52.44
″
e106
°
30
′
48.78
″
2022年05月05日15时15分16秒05毫秒8986030531ab940351389;
[0286]
第九步,将第八步中得到的第j融合触发信息进行计算,分别得到第j大小触发码:
[0287][0288][0289][0290][0291]
[0292][0293][0294][0295][0296][0297]
以上大小触发码为十六进制的数值;
[0298]
第十步,将10个大小触发码按照从大到小的顺序依次排列,分别得到:
[0299]
s9′ꢀ
s8′ꢀ
s6′ꢀ
s5′ꢀ
s4′ꢀ
s1′ꢀ
s0′ꢀ
s7′ꢀ
s3′ꢀ
s2′
[0300]
第十一步,排列后的大小触发码所对应的数字,分别为:
[0301]
9 8 6 5 4 1 0 7 3 2
[0302]
第十二步,将数字按照从左至右从上至下依次显示在按键组上,如图4所示;
[0303]
第十三步,若按了第十按键,此时控制器接收到输入数字2触发控制命令信号;由于位数未达到预设位数阈值,执行下一步;
[0304]
第十四步,获取到位置信息为n29
°
35
′
52.44
″
e106
°
30
′
48.78
″
,触发数字2的触发控制命令信号的时刻为2022年05月05日15时15分16秒45毫秒以及无线通讯模块的id号(iccid)为8986030531ab94035138。
[0305]
第十五步,将获取得到的位置信息pos=n29
°
35
′
52.44
″
e106
°
30
′
48.78
″
,触发数字2的触发控制命令信号的时刻tim
′
=2022年05月05日15时15分16秒45毫秒以及无线通讯模块的id号comid=8986030531ab94035138与数字0~9相融合,分别得到:
[0306]
mer0′
=n29
°
35
′
52.44
″
e106
°
30
′
48.78
″
2022年05月05日15时15分16秒45毫秒8986030531ab940351380;
[0307]
mer1′
=n29
°
35
′
52.44
″
e106
°
30
′
48.78
″
2022年05月05日15时15分16秒45毫秒8986030531ab940351381;
[0308]
mer2′
=n29
°
35
′
52.44
″
e106
°
30
′
48.78
″
2022年05月05日15时15分16秒45毫秒8986030531ab940351382;
[0309]
mer3′
=n29
°
35
′
52.44
″
e106
°
30
′
48.78
″
2022年05月05日15时15分16秒45毫秒8986030531ab940351383;
[0310]
mer4′
=n29
°
35
′
52.44
″
e106
°
30
′
48.78
″
2022年05月05日15时15分16秒45毫秒8986030531ab940351384;
[0311]
mer5′
=n29
°
35
′
52.44
″
e106
°
30
′
48.78
″
2022年05月05日15时15分16秒45毫秒8986030531ab940351385;
[0312]
mer6′
=n29
°
35
′
52.44
″
e106
°
30
′
48.78
″
2022年05月05日15时15分16秒45毫秒8986030531ab940351386;
[0313]
mer7′
=n29
°
35
′
52.44
″
e106
°
30
′
48.78
″
2022年05月05日15时15分16秒45毫秒8986030531ab940351387;
[0314]
mer8′
=n29
°
35
′
52.44
″
e106
°
30
′
48.78
″
2022年05月05日15时15分16秒45毫秒8986030531ab940351388;
[0315]
mer9′
=n29
°
35
′
52.44
″
e106
°
30
′
48.78
″
2022年05月05日15时15分16秒45毫秒8986030531ab940351389;
[0316]
第十六步,将第十五步中得到的第j融合触发信息进行计算,分别得到第j大小触发码:
[0317][0318][0319][0320][0321][0322][0323][0324][0325][0326][0327]
第十七步,将10个大小触发码按照从大到小的顺序依次排列,分别得到:
[0328]
s3′ꢀ
s7′ꢀ
s0′ꢀ
s1′ꢀ
s5′ꢀ
s9′ꢀ
s4′ꢀ
s6′ꢀ
s8′ꢀ
s2′
[0329]
第十八步,排列后的大小触发码所对应的数字,分别为:
[0330]
3 7 0 1 5 9 4 6 8 2
[0331]
第十九步,将数字按照从左至右从上至下依次显示在按键组上,如图5所示;
[0332]
第二十步,若按了第一按键,此时控制器接收到输入数字3触发控制命令信号;由于位数未达到预设位数阈值,执行下一步;
[0333]
第二十一步,获取到位置信息为n29
°
35
′
52.44
″
e106
°
30
′
48.78
″
,触发数字3的触发控制命令信号的时刻为2022年05月05日15时15分16秒59毫秒以及无线通讯模块的id号(iccid)为8986030531ab94035138。
[0334]
第二十二步,将获取得到的位置信息pos=n29
°
35
′
52.44
″
e106
°
30
′
48.78
″
,触发数字3的触发控制命令信号的时刻tim
′
=2022年05月05日15时15分16秒59毫秒以及无线通讯模块的id号comid=8986030531ab94035138与数字0~9相融合,分别得到:
[0335]
mer0′
=n29
°
35
′
52.44
″
e106
°
30
′
48.78
″
2022年05月05日15时15分16秒59毫秒8986030531ab940351380;
[0336]
mer1′
=n29
°
35
′
52.44
″
e106
°
30
′
48.78
″
2022年05月05日15时15分16秒59毫秒8986030531ab940351381;
[0337]
mer2′
=n29
°
35
′
52.44
″
e106
°
30
′
48.78
″
2022年05月05日15时15分16秒59毫秒8986030531ab940351382;
[0338]
mer3′
=n29
°
35
′
52.44
″
e106
°
30
′
48.78
″
2022年05月05日15时15分16秒59毫秒8986030531ab940351383;
[0339]
mer4′
=n29
°
35
′
52.44
″
e106
°
30
′
48.78
″
2022年05月05日15时15分16秒59毫秒8986030531ab940351384;
[0340]
mer5′
=n29
°
35
′
52.44
″
e106
°
30
′
48.78
″
2022年05月05日15时15分16秒59毫秒8986030531ab940351385;
[0341]
mer6′
=n29
°
35
′
52.44
″
e106
°
30
′
48.78
″
2022年05月05日15时15分16秒59毫秒8986030531ab940351386;
[0342]
mer7′
=n29
°
35
′
52.44
″
e106
°
30
′
48.78
″
2022年05月05日15时15分16秒59毫秒8986030531ab940351387;
[0343]
mer8′
=n29
°
35
′
52.44
″
e106
°
30
′
48.78
″
2022年05月05日15时15分16秒59毫秒8986030531ab940351388;
[0344]
mer9′
=n29
°
35
′
52.44
″
e106
°
30
′
48.78
″
2022年05月05日15时15分16秒59毫秒8986030531ab940351389;
[0345]
第二十三步,将第二十二步中得到的第j融合触发信息进行计算,分别得到第j大小触发码:
[0346][0347]
[0348][0349][0350][0351][0352][0353][0354][0355][0356]
第二十四步,将10个大小触发码按照从大到小的顺序依次排列,分别得到:
[0357]
s4′ꢀ
s1′ꢀ
s7′ꢀ
s8′ꢀ
s2′ꢀ
s5′ꢀ
s9′ꢀ
s0′ꢀ
s6′ꢀ
s3′
[0358]
第二十五步,排列后的大小触发码所对应的数字,分别为:
[0359]
4 1 7 8 2 5 9 0 6 3
[0360]
第二十六步,将数字按照从左至右从上至下依次显示在按键组上,如图6所示;
[0361]
第二十七步,若按了第一按键,此时控制器接收到输入数字4触发控制命令信号;由于输入的解除钻机锁定的密码位数达到预设位数阈值,且输入的解除钻机锁定的密码为1234与预设密码1234一致,因此解除钻机锁定。
[0362]
第二十八步,获取到位置信息为n29
°
35
′
52.44
″
e106
°
30
′
48.78
″
,触发数字4的触发控制命令信号的时刻为2022年05月05日15时15分17秒09毫秒以及无线通讯模块的id号(iccid)为8986030531ab94035138。
[0363]
第二十九步,将获取得到的位置信息pos=n29
°
35
′
52.44
″
e106
°
30
′
48.78
″
,触发数字4的触发控制命令信号的时刻tim
′
=2022年05月05日15时15分17秒09毫秒以及无线通讯模块的id号comid=8986030531ab94035138与数字0~9相融合,分别得到:
[0364]
mer0′
=n29
°
35
′
52.44
″
e106
°
30
′
48.78
″
2022年05月05日15时15分17秒09毫秒8986030531ab940351380;
[0365]
mer1′
=n29
°
35
′
52.44
″
e106
°
30
′
48.78
″
2022年05月05日15时15分17秒09毫秒
8986030531ab940351381;
[0366]
mer2′
=n29
°
35
′
52.44
″
e106
°
30
′
48.78
″
2022年05月05日15时15分17秒09毫秒8986030531ab940351382;
[0367]
mer3′
=n29
°
35
′
52.44
″
e106
°
30
′
48.78
″
2022年05月05日15时15分17秒09毫秒8986030531ab940351383;
[0368]
mer4′
=n29
°
35
′
52.44
″
e106
°
30
′
48.78
″
2022年05月05日15时15分17秒09毫秒8986030531ab940351384;
[0369]
mer5′
=n29
°
35
′
52.44
″
e106
°
30
′
48.78
″
2022年05月05日15时15分17秒09毫秒8986030531ab940351385;
[0370]
mer6′
=n29
°
35
′
52.44
″
e106
°
30
′
48.78
″
2022年05月05日15时15分17秒09毫秒8986030531ab940351386;
[0371]
mer7′
=n29
°
35
′
52.44
″
e106
°
30
′
48.78
″
2022年05月05日15时15分17秒09毫秒8986030531ab940351387;
[0372]
mer8′
=n29
°
35
′
52.44
″
e106
°
30
′
48.78
″
2022年05月05日15时15分17秒09毫秒8986030531ab940351388;
[0373]
mer9′
=n29
°
35
′
52.44
″
e106
°
30
′
48.78
″
2022年05月05日15时15分17秒09毫秒8986030531ab940351389;
[0374]
第三十步,将第二十九步中得到的第j融合触发信息进行计算,分别得到第j大小触发码:
[0375][0376][0377][0378][0379][0380][0381]
[0382][0383][0384][0385]
第三十一步,将10个大小触发码按照从大到小的顺序依次排列,分别得到:
[0386]
s1′ꢀ
s2′ꢀ
s4′ꢀ
s0′ꢀ
s5′ꢀ
s8′ꢀ
s6′ꢀ
s9′ꢀ
s3′ꢀ
s7′
[0387]
第三十二步,排列后的大小触发码所对应的数字,分别为:
[0388]
1 2 4 0 5 8 6 9 3 7
[0389]
第三十三步,将数字按照从左至右从上至下依次显示在按键组上,如图7所示。
[0390]
实施例2:假设预设密码为1688。
[0391]
第一步,同实施例1中的第一步。
[0392]
第二步,同实施例1中的第二步。
[0393]
第三步,同实施例1中的第三步。
[0394]
第四步,同实施例1中的第四步。
[0395]
第五步,同实施例1中的第五步。
[0396]
第七步,若按了第三按键,此时控制器接收到输入数字1触发控制命令信号;
[0397]
第七步,同实施例1中的第七步。
[0398]
第八步,同实施例1中的第八步。
[0399]
第九步,同实施例1中的第九步。
[0400]
第十步,同实施例1中的第十步。
[0401]
第十一步,同实施例1中的第十一步。
[0402]
第十二步,将数字按照从左至右从上至下依次显示在按键组上,如图8所示;
[0403]
第十三步,若按了第三按键,此时控制器接收到输入数字6触发控制命令信号;由于位数未达到预设位数阈值,执行下一步;
[0404]
第十四步,同实施例1中的第十四步。
[0405]
第十五步,同实施例1中的第十五步。
[0406]
第十六步,同实施例1中的第十六步。
[0407]
第十七步,同实施例1中的第十七步。
[0408]
第十八步,同实施例1中的第十八步。
[0409]
第十九步,将数字按照从左至右从上至下依次显示在按键组上,如图9所示;
[0410]
第二十步,若按了第九按键,此时控制器接收到输入数字8触发控制命令信号;由于位数未达到预设位数阈值,执行下一步;
[0411]
第二十一步,同实施例1中的第二十一步。
[0412]
第二十二步,同实施例1中的第二十二步。
[0413]
第二十三步,同实施例1中的第二十三步。
[0414]
第二十四步,同实施例1中的第二十四步。
[0415]
第二十五步,同实施例1中的第二十五步。
[0416]
第二十六步,将数字按照从左至右从上至下依次显示在按键组上,如图10所示;
[0417]
第二十七步,若按了第四按键,此时控制器接收到输入数字8触发控制命令信号;由于输入的解除钻机锁定的密码位数达到预设位数阈值,且输入的解除钻机锁定的密码为1688与预设密码1688一致,因此解除钻机锁定。
[0418]
第二十八步,同实施例1中的第二十八步。
[0419]
第二十九步,同实施例1中的第二十九步。
[0420]
第三十步,同实施例1中的第三十步。
[0421]
第三十一步,同实施例1中的第三十一步。
[0422]
第三十二步,同实施例1中的第三十二步。
[0423]
第三十三步,将数字按照从左至右从上至下依次显示在按键组上,如图11所示。
[0424]
实施例3:假设预设密码为5249。
[0425]
第一步,同实施例1中的第一步。
[0426]
第二步,同实施例1中的第二步。
[0427]
第三步,同实施例1中的第三步。
[0428]
第四步,同实施例1中的第四步。
[0429]
第五步,同实施例1中的第五步。
[0430]
第七步,若按了第六按键,此时控制器接收到输入数字5触发控制命令信号;
[0431]
第七步,同实施例1中的第七步。
[0432]
第八步,同实施例1中的第八步。
[0433]
第九步,同实施例1中的第九步。
[0434]
第十步,同实施例1中的第十步。
[0435]
第十一步,同实施例1中的第十一步。
[0436]
第十二步,将数字按照从左至右从上至下依次显示在按键组上,如图12所示;
[0437]
第十三步,若按了第六按键,此时控制器接收到输入数字1触发控制命令信号;由于位数未达到预设位数阈值,执行下一步;
[0438]
第十四步,同实施例1中的第十四步。
[0439]
第十五步,同实施例1中的第十五步。
[0440]
第十六步,同实施例1中的第十六步。
[0441]
第十七步,同实施例1中的第十七步。
[0442]
第十八步,同实施例1中的第十八步。
[0443]
第十九步,将数字按照从左至右从上至下依次显示在按键组上,如图13所示;
[0444]
第二十步,若按了第七按键,此时控制器接收到输入数字4触发控制命令信号;由于位数未达到预设位数阈值,执行下一步;
[0445]
第二十一步,同实施例1中的第二十一步。
[0446]
第二十二步,同实施例1中的第二十二步。
[0447]
第二十三步,同实施例1中的第二十三步。
[0448]
第二十四步,同实施例1中的第二十四步。
[0449]
第二十五步,同实施例1中的第二十五步。
[0450]
第二十六步,将数字按照从左至右从上至下依次显示在按键组上,如图14所示;
[0451]
第二十七步,若按了第七按键,此时控制器接收到输入数字9触发控制命令信号;由于输入的解除钻机锁定的密码位数达到预设位数阈值,且输入的解除钻机锁定的密码为5149与预设密码5249不一致,因此不解除钻机锁定,将之前输入的解除钻机锁定的密码清除,继续输入解除钻机锁定的密码。
[0452]
第二十八步,获取到位置信息为n29
°
35
′
52.44
″
e106
°
30
′
48.78
″
,触发数字4的触发控制命令信号的时刻为2022年05月05日15时15分17秒09毫秒以及无线通讯模块的id号(iccid)为8986030531ab94035138。
[0453]
第二十九步,将获取得到的位置信息pos=n29
°
35
′
52.44
″
e106
°
30
′
48.78
″
,触发数字4的触发控制命令信号的时刻tim
′
=2022年05月05日15时15分17秒09毫秒以及无线通讯模块的id号comid=8986030531ab94035138与数字0~9相融合,分别得到:
[0454]
mer0′
=n29
°
35
′
52.44
″
e106
°
30
′
48.78
″
2022年05月05日15时15分17秒09毫秒8986030531ab940351380;
[0455]
mer1′
=n29
°
35
′
52.44
″
e106
°
30
′
48.78
″
2022年05月05日15时15分17秒09毫秒8986030531ab940351381;
[0456]
mer2′
=n29
°
35
′
52.44
″
e106
°
30
′
48.78
″
2022年05月05日15时15分17秒09毫秒8986030531ab940351382;
[0457]
mer3′
=n29
°
35
′
52.44
″
e106
°
30
′
48.78
″
2022年05月05日15时15分17秒09毫秒8986030531ab940351383;
[0458]
mer4′
=n29
°
35
′
52.44
″
e106
°
30
′
48.78
″
2022年05月05日15时15分17秒09毫秒8986030531ab940351384;
[0459]
mer5′
=n29
°
35
′
52.44
″
e106
°
30
′
48.78
″
2022年05月05日15时15分17秒09毫秒8986030531ab940351385;
[0460]
mer6′
=n29
°
35
′
52.44
″
e106
°
30
′
48.78
″
2022年05月05日15时15分17秒09毫秒8986030531ab940351386;
[0461]
mer7′
=n29
°
35
′
52.44
″
e106
°
30
′
48.78
″
2022年05月05日15时15分17秒09毫秒8986030531ab940351387;
[0462]
mer8′
=n29
°
35
′
52.44
″
e106
°
30
′
48.78
″
2022年05月05日15时15分17秒09毫秒8986030531ab940351388;
[0463]
mer9′
=n29
°
35
′
52.44
″
e106
°
30
′
48.78
″
2022年05月05日15时15分17秒09毫秒8986030531ab940351389;
[0464]
第三十步,将第二十九步中得到的第j融合触发信息进行计算,分别得到第j大小触发码:
[0465][0466]
[0467][0468][0469][0470][0471][0472][0473][0474][0475]
第三十一步,将10个大小触发码按照从大到小的顺序依次排列,分别得到:
[0476]
s1′ꢀ
s2′ꢀ
s4′ꢀ
s0′ꢀ
s5′ꢀ
s8′ꢀ
s6′ꢀ
s9′ꢀ
s3′ꢀ
s7′
[0477]
第三十二步,排列后的大小触发码所对应的数字,分别为:
[0478]
1 2 4 0 5 8 6 9 3 7
[0479]
第三十三步,将数字按照从左至右从上至下依次显示在按键组上,如图15所示。
[0480]
在本发明的一种优选实施方式中,在步骤s3中包括以下步骤:
[0481]
s30,双手扶着左把手4b和右把手4a,并同时按下启动按键一13b和启动按键二13a,此时控制器接收到逻辑判断模块输出的高电平,控制器接收到高电平后,控制器向驱动电机1发送工作控制信号,驱动电机1旋转;
[0482]
或者s30为,双脚先踩踏住左踩踏键和右踩踏键,再双手扶着左把手4b和右把手4a,并同时按下启动按键一13b和启动按键二13a,此时控制器先后接收到判断逻辑模块和逻辑判断模块输出的高电平,控制器接收到的均为高电平后,控制器向驱动电机1发送工作控制信号,驱动电机1旋转;
[0483]
此时,在支撑底板(10)上设置有用于左脚和右脚踩踏的区域,分别为左踩踏区域和右踩踏区域,在左踩踏区域设置有用于固定安装左踩踏键的左踩踏键固定安装座,左踩踏键固定安装在左踩踏键固定安装座上,在右踩踏区域设置有用于固定安装右踩踏键的右踩踏键固定安装座,右踩踏键固定安装在右踩踏键固定安装座上,还包括判断逻辑模块,左
踩踏键的输出端与判断逻辑模块的输入第一端相连,右踩踏键的输出端与判断逻辑模块的输入第二端相连,判断逻辑模块的输出端与控制器的启动输入第二端相连;判断逻辑模块包括:npn三极管一的基极与左踩踏键的输出端相连,左踩踏键的输入端与 3.0v电源相连,npn三极管一的发射极分别与电阻一的第一端和与门一的输入第一端相连,电阻一的第二端与电源地相连,npn三极管一的集电极与电阻二的第一端相连,电阻二的第二端与 5.0v电源相连;npn三极管二的基极与右踩踏键的输出端相连,右踩踏键的输入端与 3.0v电源相连,npn三极管二的发射极分别与电阻三的第一端和与门一的输入第二端相连,电阻三的第二端与电源地相连,npn三极管二的集电极与电阻四的第一端相连,电阻四的第二端与 5.0v电源相连;与门一的输出端与控制器的启动输入端相连。当踩踏住左踩踏键和右踩踏键时,将 3.0v电源通向npn三极管一的基极和npn三极管二的基极,此时npn三极管一和npn三极管二处于导通状态,输入与门一的输入第一端和与门一的输入第二端均由低电平变为高电平,与门一输出高电平,若只踩踏住左踩踏键,不踩踏住右踩踏键时,此时npn三极管一处于导通状态,npn三极管二处于截止状态,输入与门一的输入第一端由低电平变为高电平,输入与门一的输入第二端仍为低电平,与门一输出低电平;同理,若只踩踏住右踩踏键,不踩踏住左踩踏键时,此时npn三极管二处于导通状态,npn三极管一处于截止状态,输入与门一的输入第二端由低电平变为高电平,输入与门一的输入第一端为低电平,与门一输出低电平;对应的,若均不踩踏住左踩踏键和右踩踏键时,此时npn三极管一和npn三极管二处于截止状态,输入与门一的输入第一端和输入与门一的输入第二端为低电平,与门一输出低电平。
[0484]
s31,控制器每隔t0ns向红外发射器11a发送发射红外控制命令信号,ns表示时间单位纳秒,t0为大于0的正数,红外发射器11a接收到控制器发送的发射红外控制命令信号后,红外发射器11a发出红外线;计算钻机钻入地面的距离,其钻机钻入地面的距离的计算方法为:
[0485]
d=d
0-h-l,
[0486]
其中,h表示支撑顶板2与支撑底板10间的距离值;
[0487]
d0表示钻头8至支撑顶板2间的距离值;
[0488]
d表示钻机钻入地面的距离值;
[0489]
l表示支撑底板10厚度;
[0490]
h=(1-η)c*(t
n,rx-t
n,tx
)(1-λ),
[0491]
c表示红外线的速度;
[0492]
t
n,rx
表示红外接收器11b第n次接收到红外发射器11a发射的红外线时的时刻;
[0493]
t
n,tx
表示红外发射器11a第n次发射红外线时的时刻;
[0494]
η表示介质传播误差系数,表示万分之一;
[0495]
λ表示时间误差系数,表示万分之一;
[0496]
s32,控制器判断是否接收到逻辑判断模块输入的启动信号:
[0497]
若控制器接收到逻辑判断模块输入的启动信号,则控制器向驱动电机1发送工作信号,驱动电机1带动钻头8转动;
[0498]
若控制器未接收到逻辑判断模块输入的启动信号,则返回步骤s32;
[0499]
s33,判断钻机钻入地面的距离是否达到预设距离阈值:
[0500]
若钻机钻入地面的距离达到预设距离阈值,则控制器向其驱动电机1发送停止信号,驱动电机1停止工作;
[0501]
若钻机钻入地面的距离未达到预设距离阈值,则驱动电机1继续工作,返回步骤s33。
[0502]
尽管已经示出和描述了本发明的实施例,本领域的普通技术人员可以理解:在不脱离本发明的原理和宗旨的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由权利要求及其等同物限定。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。