1.本发明涉及在进行半导体集成电路元件等被测试电子部件(以下仅称为“dut”(device under test))的测试时将dut以收容的状态进行搬运的测试用载具。
背景技术:
2.在具有细间距的端子的dut的测试中,为了将该dut相对于插座高精度地定位,需要多个相机、具备精密的移动机构的较昂贵的处理机(handler)。对此,已知有一种测试用载具,其具备保持dut的载具主体、不仅覆盖dut且固定于载具主体的盖构件、以及形成于载具主体的dut定位用的贯通孔(例如,参照专利文献1)。通过使用该测试用载具,从而能利用具备机械式定位机构的较廉价的处理机来进行具有细间距的端子的dut的测试。
3.在该测试用载具收容dut时,在经由上述定位用的贯通孔且使用相机对测试用载具的触头高精度地定位了dut后,将载具主体与盖构件进行固定。为了防止dut相对于此时的测试用载具发生位置偏离,在盖构件形成有用于对dut进行吸附保持的贯通孔。在先技术文献专利文献
4.专利文献1:jp特开2019-197012号公报
技术实现要素:
(发明要解决的课题)
5.上述处理机设置于洁净度较低的通常的作业空间,因此微小的灰尘等异物经由上述dut吸附用的贯通孔而侵入测试用载具内,该异物有时会吸附于dut。另一方面,在dut的测试结束后,为了从测试用载具取出该dut,上述测试用载具在净化室内被分解。因此,若对异物所附着的dut进行了收容的测试用载具在净化室被分解,则有时会将该异物带入下一工序。
6.本发明要解决的课题是提供一种能抑制异物向dut附着的测试用载具。(用于解决课题的技术方案)
7.[1]本发明所涉及的测试用载具是以收容有dut的状态被搬运的测试用载具,所述测试用载具具备:dut吸附保持用的贯通孔,与所述dut对置配置;以及可动阀,伴随所述贯通孔的吸引而开闭所述贯通孔,所述可动阀在所述贯通孔的吸引时敞开所述贯通孔,而在所述贯通孔的非吸引时关闭所述贯通孔。
[0008]
[2]在上述发明中,可以是,所述可动阀伴随所述贯通孔的吸引而移动或变形。
[0009]
[3]在上述发明中,可以是,所述测试用载具具备:保持构件,保持所述dut;以及盖构件,覆盖所述dut,且能装卸地固定于所述保持构件,所述贯通孔以贯通所述盖构件的盖主体的方式形成于所述盖主体。
[0010]
[4]在上述发明中,可以是,所述保持构件具备:多个触头,配置为与所述dut的端子相对应;多个外部端子,与所述触头电连接;以及保持主体,对所述触头及所述外部端子
进行保持。
[0011]
[5]在上述发明中,可以是,所述盖主体具有与所述dut接触的接触面,所述贯通孔的第一开口在所述接触面开口,所述dut夹持于所述接触面与所述触头之间。
[0012]
[6]在上述发明中,可以是,所述贯通孔的第二开口在所述盖主体的与所述接触面相反一侧的面处开口,所述第二开口是所述贯通孔的与所述第一开口相反一侧的开口。
[0013]
[7]在上述发明中,可以是,所述贯通孔具备:第一孔部;收容部,与所述第一孔部连接,且将所述可动阀能移动或变形地进行收容;以及第二孔部,经由所述收容部与所述第一孔部连接,所述可动阀在所述贯通孔的吸引时使所述第一孔部与所述第二孔部连通,而在所述贯通孔的非吸引时使所述第一孔部与所述第二孔部之间封闭。
[0014]
[8]在上述发明中,可以是,所述可动阀具有比所述第二孔部的内径大的外径,在所述贯通孔的非吸引时,所述可动阀覆盖所述第二孔部的所述收容部侧的第三开口。
[0015]
[9]在上述发明中,可以是,所述第一孔部与所述第二孔部配置为在透视俯视下彼此不重叠。
[0016]
[10]在上述发明中,可以是,所述贯通孔具备多个所述第二孔部,所述多个第二孔部经由所述收容部与所述第一孔部连接。
[0017]
[11]在上述发明中,可以是,所述第一孔部具有圆形的截面形状,所述多个第二孔部分别具有内径比所述第一孔部的内径小的圆形的截面形状,所述可动阀具有将所述多个第二孔部包围在内的外径的圆形形状,所述收容部具有内径比所述可动阀的外径大的圆形的截面形状。
[0018]
[12]在上述发明中,可以是,所述可动阀具有比所述第一孔部的内径大且比所述第二孔部的内径大的外径,所述收容部具有比所述可动阀的外径大的内径,所述可动阀能在所述第一孔部与所述第二孔部之间移动地收容于所述收容部内。
[0019]
[13]在上述发明中,可以是,所述可动阀具备:第四开口;以及阀主体,形成有所述第四开口,所述第一孔部与所述第四开口对置配置,所述第二孔部与所述阀主体对置配置,在所述贯通孔的吸引时,所述第一孔部与所述收容部经由所述第四开口连通,在所述贯通孔的非吸引时,所述阀主体覆盖所述第二孔部的所述收容部侧的第三开口。
[0020]
[14]在上述发明中,可以是,所述可动阀由金属材料或树脂材料构成,是具有对于所述贯通孔的吸引而不变形的刚性的阀构件。
[0021]
[15]在上述发明中,可以是,所述可动阀由弹性材料构成,是基于所述贯通孔的吸引而能弹性变形的阀构件,所述可动阀被固定部固定于所述盖主体,所述固定部与所述第一孔部对置配置。
[0022]
[16]在上述发明中,可以是,所述收容部具有槽,所述槽与所述第一孔部连接,且隔着所述可动阀与所述第二孔部对置配置。
[0023]
[17]在上述发明中,可以是,利用对所述测试用载具进行组装的载具组装装置的吸附保持部来吸引所述贯通孔,从而所述dut由所述吸附保持部吸附保持。(发明效果)
[0024]
根据本发明,测试用载具具备伴随dut吸附用的贯通孔的吸引而开闭该贯通孔的可动阀,因此能够抑制异物向dut附着。
附图说明
[0025]
图1是表示本发明的实施方式中的电子部件测试装置的整体构成的概略剖视图。图2是表示作为本发明的实施方式中的测试对象的dut的仰视图。图3是从上方观察本发明的实施方式中的测试用载具的立体图。图4是从下方观察本发明的实施方式中的测试用载具的立体图。图5是本发明的实施方式中的测试用载具的分解立体图。图6是表示本发明的实施方式中的测试用载具的剖视图,是沿图3的vi-vi线的剖视图。图7是表示本发明的实施方式中的测试用载具的分解剖视图,是与图6对应的图。图8是表示本发明的实施方式中的弹簧针的剖视图,是图7的viii部的放大图。图9是图7的ix部的放大图。图10是表示本发明的实施方式中的吸附用的贯通孔和可动阀的图,是沿图9的x-x线的剖视图。图11是表示本发明的实施方式中的测试用载具的保持构件的变形例的分解剖视图。图12是表示本发明的实施方式中的测试用载具的盖构件的变形例的剖视图。图13是表示图12所示的盖构件的变形例中的收容部的上表面的图,是沿图12的xiii-xiii线的剖视图。图14是表示本发明的实施方式中的载具组装装置的构成的框图。图15是表示本发明的实施方式中的测试用载具的组装方法的工序图。图16a以及图16b是表示图15的步骤s20的图,图16a是表示由第二吸附保持部对盖构件和dut进行吸附保持前的状态的图,图16b是表示由第二吸附保持部对盖构件和dut进行了吸附保持的状态的图。图17的(a)~图17的(c)是表示图15的步骤s40~s60的图,图17的(a)是表示对校准前的dut进行摄像得到的图像的图,图17的(b)是表示对校准中的dut进行摄像得到的图像的图,图17的(c)是表示对校准后的dut进行摄像得到的图像的图。
具体实施方式
[0026]
以下,基于附图来说明本发明的实施方式。
[0027]
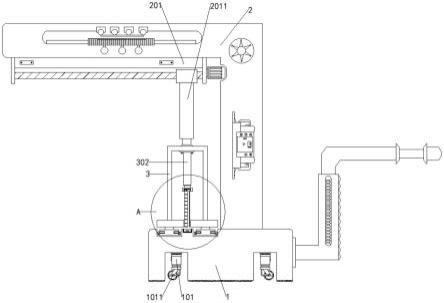
图1是表示本实施方式中的电子部件测试装置200的整体构成的概略剖视图,图2是表示作为本实施方式中的测试对象的dut90的仰视图。
[0028]
本实施方式中的电子部件测试装置200是对dut90的电气特性进行测试的装置。如图1所示,该电子部件测试装置200具备将dut推压至插座420的处理机300。该处理机300具备将dut相对于插座420进行机械定位的定位机构,但不具备用于所谓细间距的dut的利用了图像处理的高精度的定位机构。另一方面,本实施方式中的dut90是将半导体晶圆进行切割而形成的芯片,具有细间距的焊盘91。故而,在利用电子部件测试装置200进行dut90的测试时,使用测试用载具1。
[0029]
本实施方式中的dut90如图2所示,具有沿该dut90的外缘排列的焊盘91、以及排列于该dut90的中央的凸块92。焊盘91是用于dut90的测试的端子,以较宽的间距进行排列。与
之相对,凸块92是用于将该dut90向基板等进行安装的端子,以比焊盘91的间距更窄的间距进行排列。多个凸块92排列成矩形形状。此外,dut90的构成不限于上述。本实施方式中的焊盘91相当于本发明中的“dut的端子”的一例。
[0030]
在本实施方式中,若对半导体晶圆进行切割来形成dut90,则首先使用载具组装装置100(参照图14)将dut90收容于测试用载具1。然后,保持在测试用载具1收容有dut90的状态,该测试用载具1被搬入电子部件测试装置200的处理机300内,且搭载于dut搬运用的测试托盘(未图示)。
[0031]
然后,处理机300在电子部件测试装置200的测试头400的插座420上搬运该测试托盘,驱动z轴驱动装置310来使推杆320下降,并利用该推杆320将测试用载具1推压至插座420。由此,在保持搭载于测试托盘的状态下,测试用载具1被推压至插座420,dut90与插座420经由该测试用载具1而电连接。在该状态下,测试器500通过测试头400来执行dut90的测试。
[0032]
若该测试结束,则在从测试托盘取出测试用载具1后,将该测试用载具1搬运至净化室。然后,将测试用载具1进行分解,从该测试用载具1取出dut90。该测试完毕的dut90被搬运至下一工序,与之相对,取出该dut90后的测试用载具1被再次利用于别的dut90的测试。
[0033]
作为测试托盘,能沿用在经封装的已有的器件(dut)中使用的测试托盘。这样的测试托盘虽未图示,但具备框状的框架、以及保持于该框架的多个插入部。在该插入部收容测试用载具1。在此,测试用载具1的外形与已有的器件的外形相配合,由此,能将测试用载具1搭载于已有的测试托盘进行搬运。作为测试托盘以及插入部,例如能使用国际公开第2003/075024号以及国际公开第2009/069189号等记载的公知的物品。
[0034]
接下来,参照图3~图9,以下说明本实施方式中的测试用载具1的构成。
[0035]
图3以及图4是表示本实施方式中的测试用载具1的立体图,图5是本实施方式中的测试用载具1的分解立体图。图6是表示本实施方式中的测试用载具1的剖视图,是沿图3的vi-vi线的剖视图。图7是表示本实施方式中的测试用载具1的分解剖视图,是与图6对应的图。图8是表示本实施方式中的测试用载具1的弹簧针21的剖视图,是图7的viii部的放大图。图9是图7的ix部的放大图。图10是表示本实施方式中的吸附用的贯通孔64和可动阀70的图,是沿图9的x-x线的剖视图。
[0036]
本实施方式中的测试用载具1如图3~图7所示,具备:保持构件10,其保持dut90;以及盖构件60,其覆盖dut90,且能装卸地固定于保持构件10。在该测试用载具1,通过在保持构件10与盖构件60之间夹持dut90,从而将dut90收容于测试用载具1的内部。此外,该测试用载具1除盖构件60的贯通孔64和可动阀70以外,具有与日本特开2019-197012号公报中记载的载具的构成基本相同的构成。
[0037]
保持构件10具备保持主体15以及安装于该保持主体15的筒状体40。保持主体15具备保持板20和插入器30。保持主体15对弹簧针21(后述)以及外部端子32(后述)进行保持。
[0038]
保持板20对多个弹簧针21进行保持。该弹簧针21以与dut90的焊盘91对置的方式以间距p1(参照图5)进行排列。各弹簧针21如图8所示,具备柱塞22、固定部23以及线圈弹簧24。本实施方式中的弹簧针21相当于本发明中的“触头”的一例。
[0039]
弹簧针21分别插入保持板20的保持孔20a。然后,柱塞22的法兰盘22a卡止于保持
孔20a的阶差部20b,从而对柱塞22的上限位置进行限制。在该上限位置处,柱塞22的前端从保持孔20a的上侧的开口20c突出。固定部23具备:后端部23a,其位于保持孔20a的相反侧的开口20d;以及轴部23b,其从该后端部23a朝前端(上方)延伸。该轴部23b插入线圈弹簧24,线圈弹簧24夹设于柱塞22的法兰盘22a与固定部23的后端部23a之间。若dut90收容于测试用载具1,则柱塞22与dut90的焊盘91接触,基于线圈弹簧24的弹力,柱塞22推压焊盘91,dut90保持于弹簧针21。
[0040]
另外,如图6以及图7所示,在该保持板20形成有贯通该保持板20的4个开口25。各开口25与以矩形形状排列于dut90的下表面的多个凸块92当中的位于角部的凸块92(以下也称为“凸块92
’”
)对置配置(参照图2以及图17的(a)~图17的(c))。在本实施方式中,在测试用载具1的组装时,将该凸块92’作为用于供dut90相对于测试用载具1的定位的特征点进行利用。
[0041]
插入器30与保持板20的下表面重叠,且通过螺钉紧固等固定于保持板20。如图4以及图6~图8所示,该插入器30具有内部端子31、外部端子32以及布线图案33。
[0042]
内部端子31设置于插入器30的上表面。该内部端子31以与保持于保持板20的弹簧针21对置的方式以间距p1进行排列,该弹簧针21的固定部23与该内部端子31接触。
[0043]
外部端子32设置于插入器30的下表面,露出于测试用载具1的外部。该外部端子32是在dut90的测试时供电子部件测试装置200的插座420的接触引脚(未图示)电连接的端子,且以比内部端子31的间距p1宽的间距p2(参照图4)进行排列(p2>p1)。内部端子31与外部端子32通过布线图案33进行连接。
[0044]
另外,如图4、图6以及图7所示,在该插入器30形成有贯通该插入器30的4个开口34。各开口34配置为与上述保持板20的开口25实质一致。因此,通过该开口25、34,形成有将保持构件10直线状贯通的贯通孔11。该贯通孔11是用于dut90的定位的贯通孔,经由该贯通孔11,能够从外部观察到dut90的一部分(具体而言凸块92’)。该贯通孔11如后所述,用于在测试用载具1的组装时将dut90相对于该测试用载具1高精度地定位。
[0045]
尽管在本实施方式中,使用了弹簧针21作为与dut90的焊盘91接触的触头,但也可以使用弹簧针21以外的部件来作为触头。例如,如图11所示,可以使用悬臂型的探针21b作为触头。图11是表示本实施方式中的测试用载具的保持构件的变形例的分解剖视图。
[0046]
该探针21b安装于插入器30上,与该插入器30的内部端子31电连接。或者,虽未图示,也可以使用利用了各向异性导电橡胶片材的触头、在绝缘膜形成有凸块的膜式的触头,来作为测试用载具1的触头。
[0047]
此外,在使用弹簧针21作为触头的情况下,如上所述,保持主体15具备用于保持该弹簧针21的保持板20。与之相对,如图11所示,在使用探针21b作为触头的情况下,保持主体15仅具备插入器30即可。在本变形例中,插入器30相当于本发明中的“保持主体”的一例,探针21b相当于本发明中的“触头”的一例。
[0048]
返回图3~图7,筒状体40设置于保持板20的上表面,通过螺钉紧固等固定于保持板20。该筒状体40呈具有比dut90的外形大的内孔41的方筒形状,能够包围dut90的周边。在该筒状体40的侧面,以与盖构件60的闩锁80(后述)对应的方式形成有凹部42。闩锁80卡止于该凹部42,从而盖构件60能装卸地固定于保持构件10。
[0049]
另外,在该筒状体40的侧面粘贴有二维条形码50。该二维条形码50表征测试用载
具1的id(identification),用于识别该测试用载具1的个体。在本实施方式中,该二维条形码50如后所述,用于在利用载具组装装置100相对于测试用载具1定位dut90时对各个测试用载具1加上固有的误差。此外,关于表征测试用载具1的id的手段,只要是能识别测试用载具1的个体的标识,就不限于二维条形码。
[0050]
另外,该二维条形码50的用途不限于上述。例如,二维条形码50可以在数据库上与测试用载具1的电阻值建立关联。或者,二维条形码50可以在数据库上与dut90自身、该dut90的测试结果建立关联。由此,用户能够对照在dut90的测试中使用的测试用载具1,能够确保dut90的良好的可追溯性(器件跟踪性)。另外,在不良的dut90在特定的测试用载具1中频发的情况下,还能掌握该测试用载具1自身的不良。
[0051]
盖构件60具备盖主体61、可动阀70以及一对闩锁80。盖主体61具备板状的底座部62、以及从该底座部62朝下方凸状突出的凸部63。可动阀70配置于在盖主体61形成的dut吸附用的贯通孔64(后述)内。闩锁80从底座部62的两端朝下方突出。
[0052]
凸部63具有与由保持板20保持的dut90的上表面接触的接触面631,并对该dut90进行推压。此外,保持构件10的筒状体40与盖构件60的底座部62抵接,从而凸部63对dut90的推压量被限制,在该状态下,进行设定使得弹簧针21对dut90的焊盘91的推压力成为最佳值。收容于测试用载具1的dut90夹持于凸部63的接触面631与弹簧针21之间。
[0053]
在盖主体61的大致中央形成有贯通孔64,该贯通孔64贯通底座部62以及凸部63。该贯通孔64具有一个上侧的开口64a,该上侧的开口64a在底座部62的上表面621开口。该上侧的开口64a配置于底座部62的上表面621的中央。另外,该贯通孔64具有4个下侧的开口64b,该4个下侧的开口64b在凸部63的接触面631开口。该4个下侧的开口64b以包围凸部63的接触面631的中心的方式等间隔地配置为圆周状。该贯通孔64如后所述,用于载具组装装置100所执行的dut90的吸附保持。
[0054]
本实施方式中的贯通孔64相当于本发明中的“dut吸附用的贯通孔”的一例。另外,本实施方式中的下侧的开口64b相当于本发明中的“第一开口”的一例,本实施方式中的上侧的开口64a相当于本发明中的“第二开口”的一例。
[0055]
该dut吸附用的贯通孔64如图9以及图10所示,具备第一孔部641、多个(在本例中为4个)第二孔部642、以及收容部643。此外,贯通孔64所具备的第一孔部641的数量不限于上述,贯通孔64可以具备多个第一孔部641。同样,贯通孔64所具备的第二孔部642的数量不限于上述,贯通孔64可以具备一个第二孔部642。
[0056]
第一孔部641是具有内径d1的圆形的截面形状、且沿铅直方向(图中的z方向)直线状延伸的孔部。该第一孔部641构成贯通孔64的上侧的部分,上述上侧的开口64a位于该第一孔部641的上端。
[0057]
各第二孔部642也是具有内径d2的圆形的截面形状、且沿铅直方向(图中的z方向)直线状延伸的孔部。该第二孔部642构成贯通孔64的下侧的部分,上述下侧的开口64b位于该第二孔部642的下端。
[0058]
收容部643是具有内径d3的圆形的截面形状的空间,构成了贯通孔64的中央的部分。该收容部643夹设于第一孔部641与第二孔部642之间。第一孔部641从上侧与收容部643连接。另外,全部的4个第二孔部642从下侧也与收容部643连接。因此,第一孔部641与第二孔部642经由该收容部643而彼此连接。
[0059]
而且,第一孔部641的内径d1小于收容部643的内径d3(d1<d3)。如图10所示,在透视俯视(沿盖构件60的法线方向(图中的z方向)透视了该盖构件60的情况下)下,第一孔部641与收容部643配置在同轴上。
[0060]
另外,各第二孔部642的内径d2小于第一孔部641的内径d1(d2<d1),第一孔部641与多个第二孔部642配置为在透视俯视下彼此不重叠。虽未特别限定,但在本实施方式中,如图10所示,以包围第一孔部641的方式将4个第二孔部642等间隔地配置为圆周状。此外,第一孔部641的内径d1与第二孔部642的内径d2的关系不限于上述,还可以是第二孔部642的内径d2与第一孔部641的内径d1相同(d2=d1),也可以是第二孔部642的内径d2大于第一孔部641的内径d1(d2>d1)。
[0061]
另外,收容部643的内径d3大于第二孔部642的内径d2(d3>d2)。在本实施方式中,收容部643的内径d3比上述配置为圆周状的4个第二孔部642的外接圆大。故而,收容部643如图10所示,在透视俯视下收容部643配置为将全部的第二孔部642包围在内,全部的第二孔部642与收容部643连接。
[0062]
可动阀70如图9以及图10所示,是具有外径d4的圆环状的构件,具备开口72、以及在中央形成有该开口72的阀主体71。该可动阀70例如由金属材料或树脂材料构成,具有即使在载具组装装置100(后述)吸引了贯通孔64的情况下也不会变形的刚性。本实施方式中的可动阀70的开口72相当于本发明中的“第四开口”的一例。此外,若基于贯通孔64的吸引而可动阀70能在收容部643内移动,则该可动阀70也可以由弹性材料构成。
[0063]
该可动阀70收容于盖主体61的贯通孔64的收容部643内。该可动阀70的外径d4小于收容部643的内径d3(d4<d3)。另外,该可动阀70的厚度t小于收容部643的深度d(t<d)。而且,该可动阀70未相对于盖主体61固定。另外,该可动阀70的外径d4不仅大于第一孔部641的内径d1(d4>d1),而且大于第二孔部642的内径d2(d4>d2)。因此,可动阀70能在收容部643内沿上下方向(图中的z轴方向)移动,能在收容部643内在第一孔部641与第二孔部642之间移动。
[0064]
该可动阀70的开口72如图10所示,在透视俯视下与第一孔部641配置在同轴上。即,该开口72与第一孔部641对置配置。另外,该开口72的内径d5具有与第一孔部641的内径d1实质相同的大小(d5=d1)。故而,即使在基于载具组装装置100所执行的贯通孔64的吸引而可动阀70处于与收容部643的上表面643b接触的状态,第一孔部641与收容部643也经由该开口72进行连通,第一孔部641不会被可动阀70封闭。此外,开口72的内径d5不限于上述,只要可动阀70的阀主体71与第二孔部642对置,则既可以小于第一孔部641的内径d1(d5<d1),也可以大于第一孔部641的内径d1(d5>d1)。
[0065]
另外,在本实施方式中,可动阀70的外径d4大于上述配置为圆周状的4个第二孔部642的外接圆。而且,该可动阀70与收容部643同样,如图10所示,配置为在透视俯视下将全部的第二孔部642包围在内。故而,在载具组装装置100对贯通孔64非吸引时,可动阀70与收容部643的下表面643a接触,全部的第二孔部642的上侧的开口642a由可动阀70的阀主体71覆盖。本实施方式中的第二孔部642的上侧的开口642a相当于本发明中的“第三开口”的一例。
[0066]
此外,在本实施方式中,为了形成这样的中央经扩径的贯通孔64,如图7以及图9所示,利用2个构件65、66来构成了盖主体61。此外,不限于此,也可以利用单个构件来构成盖
主体61。
[0067]
第一构件65是将底座部62与凸部63一体形成的块状的构件。在该第一构件65的中央,不仅形成有第二孔部642以及收容部643,而且形成有比收容部643大的凹部65a。该凹部65a配置于收容部643的上方,且与该收容部643连接。
[0068]
另一方面,第二构件66是在其中央具有第一孔部641的环状的构件。通过将该第二构件66插入第一构件65的凹部65a,从而形成有具有贯通孔64的盖主体61。在本实施方式中,通过使形成于第二构件66的外周面的外螺纹部与形成于第一构件65的凹部65a的内周面的内螺纹部相螺合,从而将第二构件66固定于第一构件65。此外,可以使用粘接剂将第二构件66固定于第一构件。
[0069]
此外,可动阀的构成不限于上述,可以设为图12以及图13所示的构成。图12是表示本实施方式中的测试用载具的盖构件的变形例的剖视图,图13是表示图12所示的盖构件的变形例中的收容部的上表面的图,是沿图12的xiii-xiii线的剖视图。
[0070]
在该图12以及图13所示的变形例中,可动阀70b具有不带开口72的圆板形状。该可动阀70例如由橡胶等弹性材料构成,且在载具组装装置100吸引了贯通孔64的情况下能弹性变形。该可动阀70b被固定部73固定于收容部643的下表面(底面)643a。该固定部73位于可动阀70b的中央,且与第一孔部641对置。作为固定部73的具体例,虽不特别限定,但能例示螺纹紧固、粘接。
[0071]
在本变形例中,在载具组装装置100对贯通孔64非吸引时,可动阀70b未弹性变形,因此可动阀70b与收容部643的下表面643a接触,第二孔部642的上侧的开口642a由可动阀70b覆盖。与之相对,在载具组装装置100对贯通孔64吸引时,可动阀70b的中央部由固定部73进行固定,且该可动阀70b的周缘部朝上方弹性变形,因此第二孔部642的上侧的开口642a敞开,第一孔部641与第二孔部642经由收容部643连通。此时,可动阀70b被与第一孔部641对置的固定部73固定于收容部643的下表面643a,因此不会封闭该第一孔部641。
[0072]
另外,在本变形例中,在收容部643的上表面(顶面)643b形成有多个(在本例中为4条)直线状的槽643c。该多个槽643c以第一孔部641为中心呈放射状地扩展,各个槽643c不仅与第一孔部641连接,且配置为隔着可动阀70b与第二孔部642对置。由此,能够抑制因弹性变形的可动阀70b与收容部643的上表面643b接触所致的贯通孔64的封闭。
[0073]
另外,dut吸附用的贯通孔的构成也不限于上述。例如,在可动阀是基于载具组装装置的吸引而弹性变形的类型的情况下,虽未图示,但第一孔部与第二孔部可以在透视俯视下彼此重叠地进行配置,或者可以从dut吸附用的贯通孔省略第一孔部。进而,通过将载具组装装置的吸附保持部的前端部的形状设为能包围可动阀的形状,从而可以从dut吸附用的贯通孔不仅省略第一孔部还省略收容部。
[0074]
回到图3~图7,闩锁80在底座部62的两端由轴杆81能旋转地进行支承,且朝下方分别延伸。各闩锁80被未图示的弹簧朝内侧施力。在各闩锁80的前端设置有朝内侧突出的爪部82。该爪部82卡止于保持构件10的凹部42,从而盖构件60固定于保持构件10。
[0075]
接下来,参照图14来说明对以上说明的测试用载具1进行组装的载具组装装置100的构成。图14是表示本实施方式中的载具组装装置的构成的框图。
[0076]
本实施方式中的载具组装装置100如图14所示,具备第一吸附保持部110、第二吸附保持部120、减压部130、驱动部140、相机150、图像处理部160、读取器170、控制部180以及
存储部190。
[0077]
第一吸附保持部110与减压部130连接,能对保持构件10进行吸附保持。第二吸附保持部120也与减压部130连接,能对盖构件60进行吸附保持。在本实施方式中,dut90经由盖构件60的贯通孔64,与盖构件60一起由第二吸附保持部120吸附保持。虽未限定,作为第一以及第二吸附保持部110、120的具体例,例如能例示吸附焊盘。另外,作为减压部130,例如能例示真空泵。
[0078]
此外,尽管在本实施方式中,在弹簧针21的前端朝向上方的状态下第一吸附保持部110对保持构件10进行吸附保持,但不限于此,也可以在使保持构件10翻转的状态(即,弹簧针21的前端朝向下方的状态)下第一吸附保持部110对该保持构件10进行吸附保持。同样,尽管在本实施方式中,在焊盘91以及凸块92朝向下方的状态下第二吸附保持部120对盖构件60以及dut90进行保持,但不限于此,也可以在使盖构件60以及dut90翻转的状态(即,焊盘91以及凸块92朝向上方的状态)下第二吸附保持部120对该盖构件60以及dut90进行保持。
[0079]
在本实施方式中,在第二吸附保持部120连接有驱动部140。该第二吸附保持部120利用驱动部140所具有的致动器,能在xyz方向上移动,且能进行以z轴为中心的θ方向的旋转,能相对于第一吸附保持部110进行相对移动以及旋转。此外,可以设为第一吸附保持部110能相对于第二吸附保持部120移动,也可以设为第一以及第二吸附保持部110、120两者能移动。
[0080]
相机150经由由第一吸附保持部110保持的保持构件10的贯通孔11对dut90的一部分进行摄像。具体而言,相机150对包含保持构件10的贯通孔11、以及dut90所具有的凸块92当中的位于角部的凸块92’在内的图像进行摄像(参照图17的(a)~图17的(c))。相机150获取到的图像信息被发送至图像处理部160。
[0081]
图像处理部160不仅通过对该图像信息进行图像处理来检测贯通孔11的中心12的位置,而且通过检测凸块92’的位置来获取凸块92’相对于贯通孔11的中心12的相对位置(参照图17的(a)~图17的(c))。此外,关于凸块92’的相对位置的基准,只要是与贯通孔11相关的部位,就不限于该贯通孔11的中心12。
[0082]
另外,为了实现dut90相对于测试用载具1的定位而由图像处理部160获取的dut90的特征点只要是在dut90中的特征性的部分,就不限于上述凸块92’。虽未图示,但例如可以在dut90形成定位用的对准标记,并将该对准标记用作dut90的特征点。
[0083]
读取器170是读取由第一吸附保持部110保持的保持构件10的二维条形码50的条形码。该读取器170读取出的id信息被发送至控制部180。控制部180从存储部190读出与该测试用载具1的id信息对应的校正值。
[0084]
在存储部190,预先存储有具有与测试用载具1的id分别对应的多个校正值的校正值表。该校正值是与因保持构件10的加工而产生的贯通孔11相对于弹簧针21的相对位置的误差对应的校正值,是各个测试用载具1固有的值。具体而言,该校正值按如下方式求取。即,首先,通过实际计测测试用载具1,来求取贯通孔11的中心12相对于弹簧针21的中心的实际的相对位置(x1,y1)。接着,求取贯通孔11的中心12相对于弹簧针21的中心的设计上的相对位置(x0,y0)与实际的相对位置(x1,y1)之差(δx,δy)(=x0-x1,y0-y1),并将该差(δx,δy)设定为上述校正值。针对各个测试用载具1的id将该测试用载具1的校正值分别加以
关联,从而构成了校正值表。此外,贯通孔11的中心12相对于弹簧针21的中心的设计上的相对位置(x0,y0)与凸块92’的中心相对于dut90中的焊盘91的中心的相对位置对应(参照图1)。
[0085]
进而,控制部180基于由图像处理部160获取到的凸块92’的相对位置、以及上述校正值,来对驱动部140进行控制,以相对于保持构件10来定位dut90。图像处理部160、控制部180以及存储部190例如能通过计算机实现。
[0086]
以下,参照图15~图17的(c)来说明使用该载具组装装置100来将dut90收容于测试用载具1的过程。
[0087]
图15是本实施方式中的测试用载具1的组装方法的工序图。另外,图16a以及图16b是表示图15的步骤s20的图,图16a是表示由第二吸附保持部120保持盖构件60和dut90前的状态的图,图16b是表示由第二吸附保持部120保持了盖构件60和dut90的状态的图。另外,图17的(a)~图17的(c)是表示图15的步骤s40~s60的图,图17的(a)是表示在校准前由相机150经由贯通孔11对dut90的下表面进行摄像得到的图像的图,图17的(b)是表示在校准中由相机150经由贯通孔11对dut90的下表面进行摄像得到的图像的图,图17的(c)是表示在校准后由相机150经由贯通孔11对dut90的下表面进行摄像得到的图像的图。
[0088]
首先,在图15的步骤s10中,第一吸附保持部110对测试用载具1的保持构件10进行吸附保持。此时,第一吸附保持部110在弹簧针21的前端朝向上方的状态下从下侧对保持构件10进行吸附保持。
[0089]
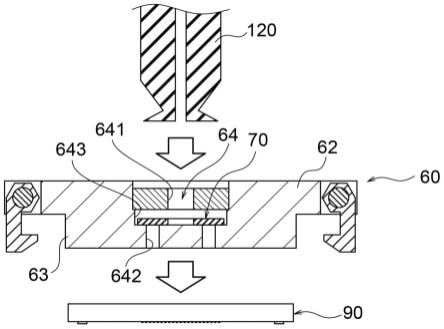
接着,在图15的步骤s20中,第二吸附保持部120对盖构件60和dut90进行吸附保持。此时第二吸附保持部120在焊盘91以及凸块92朝向下方的状态下从上侧对盖构件60以及dut90进行吸附保持。
[0090]
在此,在载具组装装置100吸引贯通孔64前,如图16a所示,可动阀70因其自重在收容部643内下降而与该收容部643的下表面643a接触,第二孔部642的上侧的开口642a被可动阀70的阀主体71覆盖。如此,在本实施方式中,在载具组装装置100未对盖构件60以及dut90进行吸附保持时(即,第二吸附保持部120与盖构件60未接触时),贯通孔64的第一孔部641与第二孔部642之间被可动阀70封闭,因此能够抑制微小的灰尘等异物经由该贯通孔64侵入测试用载具1内。
[0091]
然后,在该步骤s20中,若载具组装装置100吸引贯通孔64,则如图16b所示,可动阀70在收容部643内被吸起,而与该收容部643的上表面643b接触。此时,第一孔部641与收容部643经由该可动阀70的开口72连通,第一孔部641不会被可动阀70封闭,因此第二吸附保持部120能够对盖构件60和dut90进行吸附保持。另外,此时,即使可动阀70未封闭贯通孔64,第二吸附保持部120也与盖构件60接触,因此异物不会经由贯通孔64侵入测试用载具1内。
[0092]
另外,在第二吸附保持部120与盖构件60未接触时,即使侵入贯通孔64内的异物附着在可动阀70上,基于该步骤s20中的载具组装装置100对贯通孔64的吸引,该异物也会被排出至测试用载具1的外部。
[0093]
接着,在图15的步骤s30中,利用驱动部140使第二吸附保持部120沿z轴方向下降,使dut90的焊盘91与保持构件10的弹簧针21相接近。虽未限定,但例如在该状态下,焊盘91与弹簧针21之间的间隔为0.05mm左右。
[0094]
接着,在图15的步骤s40中,如图17的(a)所示,利用相机150经由贯通孔11对dut90的一部分进行摄像,并将图像信息发送至图像处理部160。图像处理部160从该图像信息中获取凸块92’的中心相对于贯通孔11的中心12的相对位置。图像处理部160将该凸块92’的相对位置发送至控制部180。
[0095]
接着,在图15的步骤s50中,由读取器170读取赋给保持构件10的二维条形码50,控制部180从存储部190读出与其id信息对应的校正值。
[0096]
接着,在图15的步骤s60中,控制部180基于由图像处理部160获取到的凸块92’的相对位置来控制驱动部140。在本实施方式中,控制部180控制驱动部140,以使凸块92’的中心与贯通孔11的中心12一致。驱动部140遵照来自控制部180的指示使第二吸附保持部120在xy平面上移动,由此,dut90的凸块92’的中心位于贯通孔11的中心12(参照图17的(b))。
[0097]
另外,在该步骤s60中,控制部180基于从存储部190读出的校正值来控制驱动部140。驱动部140遵照来自控制部180的指示来使第二吸附保持部120在xy平面上进一步移动,由此,dut90的凸块92’的中心从贯通孔11的中心12偏离校正量(δx,δy)(参照图17的(c))。由此,加入各个测试用载具1所具有的误差,因此将焊盘91相对于弹簧针21高精度地定位。
[0098]
此外,实际在该步骤s60中,将基于凸块92’的相对位置的驱动部140的控制以及基于校正值的驱动部140的控制同时执行。另外,在步骤s60中,控制部180可以基于多个凸块92’的位置来控制驱动部140,以使第二吸附保持部120朝θ方向旋转。
[0099]
接着,在图15的步骤s70中,利用驱动部140使第二吸附保持部120沿z轴方向进一步下降,使保持构件10的筒状体40与盖构件60的底座部62抵接。由此,弹簧针21以最佳的推压力对dut90的焊盘91进行推压,且dut90被弹簧针21与盖构件60夹持。另外,随着驱动部140执行的第二吸附保持部120的下降,闩锁80的爪部82卡止于筒状体40的凹部42,盖构件60固定于保持构件10。
[0100]
接着,在图15的步骤s80中,在搬运单元(未图示)保持着测试用载具1的状态下,第一以及第二吸附保持部110、120的吸附被解除,dut90到测试用载具1的收容作业完成。
[0101]
若第二吸附保持部120的吸附被解除,则贯通孔64成为未被吸引的状态,因此与上述图16a的状态同样,可动阀70因其自重而下降,第二孔部642的上侧的开口642a由可动阀70覆盖。如此,在本实施方式中,在载具组装装置100未对盖构件60以及dut90进行吸附保持时(即,第二吸附保持部120与盖构件60未接触时),贯通孔43的第一孔部641与第二孔部642之间被可动阀70封闭,因此能够抑制微小的灰尘等异物经由该贯通孔64侵入测试用载具1内。
[0102]
如上所述,在本实施方式中,测试用载具1具备伴随dut吸附用的贯通孔64的吸引而开闭该贯通孔64的可动阀70。故而,在贯通孔64被吸引的状态下,可动阀70未封闭该贯通孔64,因此能对dut90进行吸附保持。另一方面,在贯通孔64未被吸引的状态下,可动阀70封闭了该贯通孔64,因此能够抑制异物经由贯通孔64侵入测试用载具1内。故而,能够抑制在净化室内异物向从测试用载具1取出的测试完毕的dut90附着,能够抑制异物被带入下一工序。
[0103]
此外,以上说明的实施方式是为了使本发明的理解容易而记载的,并非是为了限定本发明而记载的。因此,上述实施方式中公开的各要素还包含属于本发明的技术范围的
全部的设计变更、等同要素。
[0104]
例如,测试用载具1可以不具备定位用的贯通孔11。在此情况下,可以获取对dut90的焊盘91摄像得到的图像、以及对弹簧针21摄像得到的图像,并基于这些图像来运算dut90相对于弹簧针21的相对位置,从而将dut90相对于测试用载具1进行定位。
[0105]
另外,例如,尽管在上述实施方式中,作为dut90的具体例,例示了芯片,但不限于此。例如,dut90也可以是经封装的器件。另外,上述实施方式中的dut90虽然是存储器系的器件,但不限于此。例如,dut90可以是soc(system on a chip)、逻辑系的器件。
[0106]
另外,尽管上述实施方式中的电子部件测试装置200具备在测试托盘保持dut90的状态下将该dut90向插座420推压的类型的处理机300,但处理机300的构成不限于此。例如,处理机300也可以是利用对dut进行吸附保持的臂部来将该dut向插座推压的类型的处理机。(标号说明)
[0107]
1 测试用载具10 保持构件15 保持主体21 弹簧针21b 探针32 外部端子60 盖构件61 盖主体62 底座部621 上表面63 凸部631 接触面64 贯通孔(dut吸附用的贯通孔)64a 开口64b 开口641 第一孔部642 第二孔部642a 开口643 收容部643a 下表面643b 上表面643c 槽70、70b可动阀71 阀主体72 开口73 固定部90 dut
100 载具组装装置120 第二吸附保持部。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。