一种agv小车的变速控制系统及其控制方法
技术领域
1.本发明涉及智能控制技术领域,特别是涉及一种agv小车的变速控制系统及其控制方法。
背景技术:
2.agv小车是指装备有电磁或光学等自动导引装置,能够沿规定的导引路径行驶,具有安全保护以及各种移载功能的运输车,工业应用中不需驾驶员的搬运车,以可充电之蓄电池为其动力来源。一般可通过电脑来控制其行进路线以及行为,或利用电磁轨道来设立其行进路线,电磁轨道黏贴于地板上,无人搬运车则依靠电磁轨道所带来的讯息进行移动与动作。
3.现有的agv小车在按照规定路线行驶的过程中,碰到障碍物时,只能实现突发状况的紧急制动和转向来避开障碍物,容易导致因减速距离不够,小车无法减速至安全转向速度,导致的货物因惯性作用而出现的坍塌等问题,影响了agv小车的安全使用。
4.基于此,本发明设计了一种agv小车的变速控制系统及其控制方法,以解决上述问题。
技术实现要素:
5.为了解决目前背景技术中提及的技术问题,本发明的目的是提供一种agv小车的变速控制系统及其控制方法。
6.为了实现上述目的,本发明采用如下技术方案:
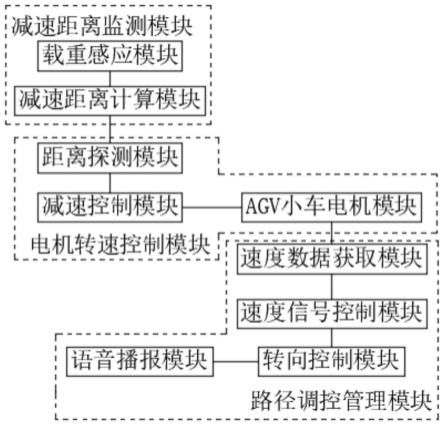
7.一种agv小车的变速控制系统,包括减速距离检测模块、电机转速控制模块和路径调控管理模块;
8.所述减速距离检测模块,用于实时检测agv小车运载重量数据,并自动计算出其转向减速的安全距离;
9.所述电机转速控制模块,用于监测到agv小车前方障碍物的控制信号时,自动根据测算的安全距离对行驶电机进行控制减速;
10.所述路径调控管理模块,用于在agv小车到达障碍物指定距离时,自动控制转向。
11.优选的,所述减速距离检测模块包括载重感应模块和减速距离计算模块;
12.所述载重感应模块,用于实时测取agv小车上的载重数据信息;
13.所述减速距离计算模块,用于根据agv小车的载重数据信息,测算出进行转向减速的安全距离。
14.优选的,所述电机转速控制模块包括距离探测模块、减速控制模块和agv小车电机模块;
15.所述距离探测模块,用于检测agv小车正前方障碍物的距离数据信息;
16.所述减速控制模块,用于接收agv小车正前方障碍物的距离数据信息与测算出的减速距离相等时的控制信号;
17.所述agv小车电机模块,用于接收所述减速控制模块的电机控制信号,并控制电机转速。
18.优选的,所述路径调控管理模块包括速度数据获取模块、速度信号控制模块、转向控制模块和语音播报模块;
19.所述速度数据获取模块,用于获取agv小车减速时的速度数据信息;
20.所述速度信号控制模块,用于接收agv小车减速时的速度数据信息与转向速度数据信息相等时的控制信号;
21.所述转向控制模块,用于agv小车接收到所述速度信号控制模块的控制信号时,自动控制agv小车转向行驶;
22.所述语音播报模块,用于对所述转向控制模块在转向时的转向方向进行语音播报。
23.优选的,所述转向控制模块包括左转向控制模块、右转向控制模块和停车控制模块;
24.所述左转向控制模块,用于障碍物存在于agv小车右前方时控制左转向;
25.所述右转向控制模块,用于障碍物存在于agv小车左前方时控制右转向;
26.所述停车控制模块,用于在agv小车左前方以及右前方均存在障碍物,控制停止。
27.一种agv小车的变速控制方法,包括如下步骤:
28.s1、在agv小车装载货物时,自动通过载重与减速加速度的关系计算出agv小车转向减速的安全距离;
29.s2、在agv小车正前方存在障碍物时,测算障碍物与agv小车之间的距离,并在达到转向安全距离时,自动控制电机减速;
30.s3、获取减速过程中的agv小车的速度数据信息,并在agv小车速度减速至转向速度时,自动控制转向。
31.与现有技术相比,本发明实现的有益效果:本发明通过根据agv小车在装载货物时,载重与减速加速度之间的关系,在遇到前方存在障碍物时的安全减速距离,保证了在小车需要转向时的安全减速距离,防止了在小车转向时无法达到正常的转向速度而导致的货物坍塌,实现了agv小车减速的智能控制。
附图说明
32.以下结合附图和具体实施方式来进一步详细说明本发明:
33.图1为本发明的系统构架图;
34.图2为本发明转向控制模块的系统分图;
35.图3为本发明的流程框图。
具体实施方式
36.以下由特定的具体实施例说明本发明的实施方式,熟悉此技术的人士可由本说明书所揭露的内容轻易地了解本发明的其他优点及功效。
37.请参阅图1至图2。本发明提供一种技术方案:一种agv小车的变速控制系统,包括减速距离检测模块、电机转速控制模块和路径调控管理模块;
38.所述减速距离检测模块,用于实时检测agv小车运载重量数据,并自动计算出其转向减速的安全距离;
39.所述电机转速控制模块,用于监测到agv小车前方障碍物的控制信号时,自动根据测算的安全距离对行驶电机进行控制减速;
40.所述路径调控管理模块,用于在agv小车到达障碍物指定距离时,自动控制转向。
41.需要说明的是,根据动力学的相关知识,在物体按照指定速度行驶时,当物体重量越大,物体产生的惯性就会变大,而且在地面上的制动距离就会越远,因此在对agv小车进行变速管理时,可以在agv小车装载货物后,自动对小车的载重进行感应获取,在利用减速距离检测模块对转向安全距离进行测算时,先将小车感应获取的载重和小车自重进行叠加得到小车重量数据,再利用agv小车的车轮与地面之间的动摩擦因素和小车重量之间的关系,进而计算出小车的减速加速度,因此根据agv小车在正常行驶状态下的行驶速度,自动根据减速加速度和行驶速度之间的函数关系,计算出小车在减速至转向速度时的安全减速距离,并且在小车前方存在障碍物时,自动计算障碍物与小车之间的距离,并且在到达安全距离时,自动控制小车电机的减速工作,而且在小车的车速调控到转向速度时,通过路径调控管理模块控制小车转向,避开障碍物。
42.更进一步的实施方式为,所述减速距离检测模块包括载重感应模块和减速距离计算模块;
43.所述载重感应模块,用于实时测取agv小车上的载重数据信息;
44.所述减速距离计算模块,用于根据agv小车的载重数据信息,测算出进行转向减速的安全距离;
45.在agv小车上运载货物时,通过载重感应模块对自动测算小车的载重重量数据,并且根据小车重量与制动时的动摩擦因素之间的关系,先对小车在减速时的减速加速度进行测算,并且根据小车的初始速度以及可以实现转向时的转向速度,对转向前的减速安全距离进行测算。
46.更进一步的实施方式为,所述电机转速控制模块包括距离探测模块、减速控制模块和agv小车电机模块;
47.所述距离探测模块,用于检测agv小车正前方障碍物的距离数据信息;
48.所述减速控制模块,用于接收agv小车正前方障碍物的距离数据信息与测算出的减速距离相等时的控制信号;
49.所述agv小车电机模块,用于接收所述减速控制模块的电机控制信号,并控制电机转速;
50.在agv小车检测到前方存在障碍物时,实时测算小车与障碍物之间的距离,并且在距离达到减速的安全距离时,自动通过控制行驶电机减速来达到小车减速行驶的目的。
51.更进一步的实施方式为,所述路径调控管理模块包括速度数据获取模块、速度信号控制模块、转向控制模块和语音播报模块;
52.所述速度数据获取模块,用于获取agv小车减速时的速度数据信息;
53.所述速度信号控制模块,用于接收agv小车减速时的速度数据信息与转向速度数据信息相等时的控制信号;
54.所述转向控制模块,用于agv小车接收到所述速度信号控制模块的控制信号时,自
动控制agv小车转向行驶;
55.所述语音播报模块,用于对所述转向控制模块在转向时的转向方向进行语音播报;
56.在小车减速的过程中,速度逐渐减速至小车转向时的安全转向速度,并在达到转向速度时,通过语音播报小车即将转向的方位,来对前方障碍物优选为人时的提醒。
57.更进一步的实施方式为,所述转向控制模块包括左转向控制模块、右转向控制模块和停车控制模块;
58.所述左转向控制模块,用于障碍物存在于agv小车右前方时控制左转向;
59.所述右转向控制模块,用于障碍物存在于agv小车左前方时控制右转向;
60.所述停车控制模块,用于在agv小车左前方以及右前方均存在障碍物,控制停止;
61.通过获取障碍物所在小车的方位来控制小车转向,可以便于提高小车的转向效率,而且在前方左右两侧均存在障碍物时,会停止小车的移动来避开障碍物。
62.请参阅图3。一种agv小车的变速控制方法,包括如下步骤:
63.s1、在agv小车装载货物时,自动通过载重与减速加速度的关系计算出agv小车转向减速的安全距离;
64.s2、在agv小车正前方存在障碍物时,测算障碍物与agv小车之间的距离,并在达到转向安全距离时,自动控制电机减速;
65.s3、获取减速过程中的agv小车的速度数据信息,并在agv小车速度减速至转向速度时,自动控制转向;
66.在对agv小车前方碰到障碍物时,会预先测算小车上的载重,并且根据小车载重叠加小车自身重量与制动时动摩擦因素之间的物理学关系,计算出由于惯性行驶时的减速加速度,并且再根据小车行驶时的初速度与转向时的速度,计算出小车需要减速的安全距离,来完成对小车的制动减速,并且在到达可以减速的安全速度时,完成转向工作,可以有效的避免因堆积的货物因惯性原因导致的制动距离不够,而碰撞到障碍物,或因减速制动抱死,导致的货物坍塌,通过此种方式可以有效的保证agv小车在减速转向时的安全行驶。
67.须知,本说明书所附图式所绘示的结构、比例、大小等,均仅用以配合说明书所揭示的内容,以供熟悉此技术的人士了解与阅读,并非用以限定本发明可实施的限定条件,故不具技术上的实质意义,任何结构的修饰、比例关系的改变或大小的调整,在不影响本发明所能产生的功效及所能达成的目的下,均应仍落在本发明所揭示的技术内容得能涵盖的范围内。同时,本说明书中所引用的如“上”、“下”、“左”、“右”、“中间”及“一”等的用语,亦仅为便于叙述的明了,而非用以限定本发明可实施的范围,其相对关系的改变或调整,在无实质变更技术内容下,当亦视为本发明可实施的范畴。
68.上述实施例仅例示性说明本发明的原理及其功效,而非用于限制本发明。任何熟悉此技术的人士皆可在不违背本发明的精神及范畴下,对上述实施例进行修饰或改变。因此,举凡所属技术领域中具有通常知识者在未脱离本发明所揭示的精神与技术思想下所完成的一切等效修饰或改变,仍应由本发明的权利要求所涵盖。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。