技术特征:
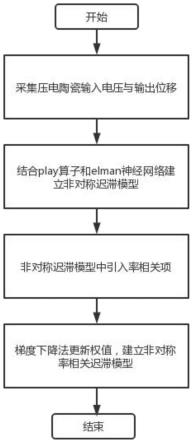
1.一种基于play算子的非对称率相关迟滞建模方法,其特征在于,包括以下步骤:s1、采集压电陶瓷输入电压与输出位移所述压电陶瓷的输出位移的获取方法为,通过一功率放大电路将输入电压放大,并加载到压电陶瓷两端,驱动压电陶瓷产生位移,并通过激光位移传感器采集压电陶瓷的位置;s2、结合play算子和elman神经网络建立非对称迟滞模型;s3、非对称迟滞模型中引入率相关项,建立非对称率相关迟滞模型;s4、梯度下降法更新权值,建立非对称率相关迟滞最终模型。2.根据权利要求1所述的基于play算子的非对称率相关迟滞建模方法,其特征在于,所述压电陶瓷选取具有迟滞特性的压电陶瓷。3.根据权利要求1所述的基于play算子的非对称率相关迟滞建模方法,其特征在于,所述的步骤s2中,play算子的由pi模型输出,输出的play算子的定义为:述的步骤s2中,play算子的由pi模型输出,输出的play算子的定义为:其中,t
i
=t-t<t≤t
i 1
,0≤i≤n-1,n为同一时刻的输入电压下,产生n个play算子,v(t)为控制输入,为play算子输出,r
i
为play算子的输入阈值,t为采样时间,t为采样周期,对任意输入v(t)∈c
m
[0,t
e
],使得函数在每个子区间[t
i
,t
i 1
]上是单调的,c
m
[0,t
e
]表示分段单调连续函数空间,0=t0<t1<
…
<t
n
=t
e
是c
m
[0,t
e
]的一个划分。4.根据权利要求3所述的基于play算子的非对称率相关迟滞建模方法,其特征在于,所述play算子的输入阈值r
i
的设定:其中,max{|v(t)|,v(t)∈c
m
[0,t
e
]}为输入条件下的最大值。5.根据权利要求3或4所述的基于play算子的非对称率相关迟滞建模方法,其特征在于,所述步骤s2建立非对称迟滞模型的方法为:s2-1、引入包络函数h(v(t)):h(v(t))=a1v3(t) a2v(t)其中,h(v(t))是非递减连续函数,s2-2、根据获取的play算子在elman神经网络结构的构造中,利用play算子与包络函数h(v(t))作为elman神经网络的输入空间,则在此条件下,elman神经网络的函数信号与误差信号的有关计算表达式描述为:elman神经网络输入层节点的输入与输出为:elman神经网络输入层节点的输入与输出为:i=0,1,
…
,n-1式中,i0为输入层的输入,o0为输入层的输出,n为同一时刻的输入电压下的play算子个数,则输入层节点数为n 2,
elman神经网络隐含层的输入输出分别为:elman神经网络隐含层的输入输出分别为:式中,i1为隐含层的输入,o1为隐含层的输出,为背景单元的反馈节点连接至隐含层神经元的突触权值;为外界输入点连接至隐含层神经元的突触权值;q为隐含层神经元的节点数,对于隐含层神经元的激活函数选择为:正负对称的sigmoid函数——双曲正切函数:背景单元中反馈层节点的输入与输出为:背景单元中反馈层节点的输入与输出为:式中,i'0为反馈层的输入,o'0为反馈层的输出,q为反馈层节点数,也即隐含层节点数。elman神经网络输出神经元的输出为:式中,i2为输出层的输入,o2为输出层的输出,q为隐含层神经元的节点数,s2-3、最终结合play算子与elman神经网络的非对称迟滞模型:3、最终结合play算子与elman神经网络的非对称迟滞模型:i=0,1,
…
,n-116.根据权利要求5所述的基于play算子的非对称率相关迟滞建模方法,其特征在于,所述的步骤s3中,引入率相关项建立非对称率相关迟滞模型的方法为:在elman神经网络的隐含层至输出层的权值处引入输入电压的导数dv(t)/dt,此时,引入率相关项的非对称率相关迟滞模型:
i=0,1,
…
,n-117.根据权利要求4所述的基于play算子的非对称率相关迟滞建模方法,其特征在于:所述的步骤s4中,建立非对称率相关迟滞最终模型的方法为:s4-1、对elman神经网络的权重参数进行初始化elman神经网络采用的是双曲正切激活函数则elman神经网络的输入层至隐含层权重与背景单元反馈层至隐含层权重采用xavier的权重初始化方式,由输入层至隐含层的权重独立同分布,其输入层输入独立同分布,即随机变量与独立,且均值都为0,则有:所以,时,由输入层至隐含层的输出部分方差与输入的方差一致,则在随机初始化权重时,权值采样自n(0,1/(n 2))的高斯分布,其中n 2为输入层神经元个数,同理,可得由背景单元的反馈层至隐含层在随机初始化权重时,权值采样自n(0,1/q)的高斯分布,其中q为背景单元反馈层的神经元个数,即隐含层神经元个数。s4-2、采用bp学习方法,对网络的突触权值进行迭代修正,并附加一个使搜索快速收敛全局极小的动量项,定义系统的代价函数为:其中,辨识误差为e
m
(t)=y
out
(t)-y
m
(t)其中,y
out
(t)为理想输出,输入层至隐含层神经元的突触权值学习算法:
其中,神经元j的局域梯度为:式中,背景单元中反馈层至隐含层神经元的突触权值学习算法:背景单元中反馈层至隐含层神经元的突触权值学习算法:隐含层至输出层神经元的突出权值学习算法:隐含层至输出层神经元的突出权值学习算法:由于在隐含层至输出层加入频率相关部分,所以由隐含层至输出层的权值调整分为两部分,则为:部分,则为:部分,则为:部分,则为:所以隐含层至输出层的权值学习算法中:所以隐含层至输出层的权值学习算法中:式中,η是学习效率;α是动量因子;j=1,2,
…
,q;
s4-3、elman神经网络训练学习时,其输入端接收所有的输入向量,计算输出结果,并与目标向量进行比较,从而产生一系列误差向量,在每一次的迭代过程中,根据反向传播来确定每一个权值的误差梯度近似值,反向传播训练函数则利用该梯度对权值进行更新,直到elman神经网络输出达到期望输出,此处的期望输出选择为s1中所获取的压电陶瓷装置的输出位移量,以此获取各层权值参数,建立基于play算子和elman神经网络的非对称率相关迟滞的最终模型。
技术总结
本发明公开了一种基于play算子的非对称率相关迟滞建模方法,包括以下步骤:S1、采集压电陶瓷输入电压与输出位移;S2、结合play算子和elman神经网络建立非对称迟滞模型;S3、非对称迟滞模型中引入率相关项;S4、梯度下降法更新权值,建立非对称率相关迟滞最终模型。通过使用play算子作为elman神经网络的输入,以此拓展神经网络的输入层。同时利用elman神经网络的高精度逼近非线性函数能力,使模型参数辨识更为方便,并且elman神经网络已有经典的训练算法。练算法。练算法。
技术研发人员:田玉平 姚永琪 张扬名 何猛 赵月腾 刘崧
受保护的技术使用者:杭州电子科技大学
技术研发日:2022.05.17
技术公布日:2022/8/30
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。