基于x线测量运动系统畸形弯曲及旋转角度的方法和系统
技术领域
1.本发明属于医学图像技术领域,具体涉及一种基于x线测量运动系统畸形弯曲及旋转角度的方法和系统。
背景技术:
2.运动系统畸形如脊柱畸形、膝内翻畸形、肘内翻畸形等对人体生命健康影响很大,比如脊柱侧弯是一种致残性、致死性的脊柱畸形,文献报道其发病率为2%~4%,由于脊柱侧弯引起外观畸形、疼痛和脏器功能障碍,会严重影响患者的身心健康,如未能及时进行良好的治疗,将会给家庭和社会带来沉重的负担。对运动系统畸形患者进行手术前,需要对患者的畸形程度进行全面、准确的评估。x线因简单、方便,被广泛应用于运动系统畸形的评估领域,但是现有技术中采用x片得到的cobb角反映的只是平面投影上的畸形弯曲及旋转角度,而不是立体空间内的真实角度,比如基于脊柱正侧位x片的cobb角反映的只是平面投影上的脊柱侧弯角度,并不是立体空间内的真实脊柱侧弯角度,这一影像学上的失真,必然会对外科医师进行脊柱畸形的评估及制定手术治疗方案产生不利的影响。因此,如何提供一种基于x线测量运动系统畸形在立体空间内的真实弯曲角度及旋转角度的方法,得到更接近于患者疾病真实情况的数据,为外科医师进行脊柱畸形的评估及制定手术治疗方案提供有力的帮助,是本领域迫切需要解决的重要课题。
技术实现要素:
3.本发明的目的在于克服现有技术中存在的缺点,提供一种基于x线测量运动系统畸形弯曲及旋转角度的方法和系统,可以获得运动系统畸形在立体空间内的真实侧弯角度以及旋转角度。
4.本发明的目的通过下述技术方案实现:
5.一种基于x线测量运动系统畸形弯曲及旋转角度的方法,是获取患者某一部位运动系统畸形的正位x线片和/或侧位x线片,根据x线片确定患者的运动系统畸形关键点,并根据关键点构建三维坐标系,获得关键点的坐标数据;根据所述关键点的坐标数据,预测运动系统畸形在三维空间的弯曲角度和旋转角度。
6.所述运动系统畸形关键点包括:正位x线片中,运动系统畸形部位下端的两侧顶点a和b,a点和b点连线ab的中点o,运动系统畸形部位上端的两侧顶点c和d,c点和d点连线cd的中点f,垂线i和垂线ii的交点g,其中垂线i为过连线ab的中点o且与ab相交的垂线,垂线ii为过连线cd的中点f且与cd相交的垂线。
7.所述运动系统畸形关键点还包括:侧位x线片中,运动系统畸形部位下端的两侧顶点h和i,h点和i点连线hi的中点o’,运动系统畸形部位上端的两侧顶点j和k,j点和k点连线jk的中点f’,垂线iii和垂线vi的交点g’,其中垂线iii为过连线hi的中点o’且与hi相交的垂线,垂线vi为过连线jk的中点f’且与jk相交的垂线。
8.所述构建三维坐标系包括下述步骤:在正位片上以o点为原点,在侧位片上以o’点
为原点,分别建立三维空间坐标系,得到所述关键点a、b、c、d、h、i、j、k、o、o’、f、f’、g、g’的坐标,包括:正位x线片中,运动系统畸形部位下端的两侧顶点a和b连线ab的中点o的坐标o(0,0),运动系统畸形部位上端的两侧顶点c和d连线cd的中点f的坐标f(x1,y1),垂线i和垂线ii的交点g的坐标g(x2,y2);侧位x线片中,运动系统畸形部位下端的两侧顶点h和i点连线hi的中点o’的坐标o’(0,0),运动系统畸形部位上端的两侧顶点j和k连线jk的中点f’的坐标f’(z1,y1),垂线iii和垂线vi的交点g’的坐标g’(z2,y1)。
9.所述运动系统畸形在三维空间的弯曲角度scoliotic angle的运算函数为下式:
10.scoliotic angle=arccos
11.式中:arccos表示的是数学概念中反三角函数的反余弦;x1是正位x线片上运动系统畸形部位上端的两侧顶点c和d连线cd的中点f的横坐标值;y1是正位x线片上运动系统畸形部位上端的两侧顶点c和d连线cd的中点f的纵坐标值;x2是正位x线片上垂线i和垂线ii的交点g的横坐标值;y2是正位x线片上垂线i和垂线ii的交点g的纵坐标值;z1是侧位x线片上运动系统畸形部位上端的两侧顶点j和k连线jk的中点f’的横坐标值;z2是侧位x线片上垂线iii和垂线vi的交点g’的横坐标值。
12.运动系统畸形在三维空间的旋转角度rotationg angle的运算函数为下式:
13.rotationg angle=arctan(z2÷
x2)
14.式中:arctan表示的是数学概念中反三角函数的反正切;z2是侧位x线片上垂线iii和垂线vi的交点g’的横坐标值;x2是正位x线片上垂线i和垂线ii的交点g的横坐标值。
15.一种基于x线测量运动系统畸形弯曲及旋转角度的系统,包括:图像导入模块、图像处理模块、坐标标记模块、函数运算模块、结果输出模块。
16.所述图像导入模块,是将患者的运动系统畸形部位x线片的图片资料导入系统中。
17.所述图像处理模块,是对导入的x线片进行放大、缩小、旋转、明暗、对比度等预处理,使得图像便于观察者识别,方便观察者进行关键点坐标的标记。
18.所述坐标标记模块,是观察者根据x线片对关键点进行标记,系统根据关键点建立三维空间坐标系,从而获得关键点的坐标数据;所述关键点包括:正位x线片中,运动系统畸形部位下端的两侧顶点a和b,a点和b点连线ab的中点o,运动系统畸形部位上端的两侧顶点c和d,c点和d点连线cd的中点f,垂线i和垂线ii的交点g,其中垂线i为过连线ab的中点o且与ab相交的垂线,垂线ii为过连线cd的中点f且与cd相交的垂线;侧位x线片中,运动系统畸形部位下端的两侧顶点h和i,h点和i点连线hi的中点o’,运动系统畸形部位上端的两侧顶点j和k,j点和k点连线jk的中点f’,垂线iii和垂线vi的交点g’,其中垂线iii为过连线hi的中点o’且与hi相交的垂线,垂线vi为过连线jk的中点f’且与jk相交的垂线。
19.所述函数运算模块,是将获得的关键点的坐标数据进行函数运算,包括真实弯曲角度、旋转角度的运算。
20.所述结果输出模块,是将函数运算后获得的运动系统畸形真实弯曲角度、旋转角度的结果进行输出。
21.所述基于x线测量运动系统畸形弯曲及旋转角度的系统,还包括用户操作界面模块,其包含多个直观的界面和选项,用于用户进行系统的各种操作。
22.本发明与现有技术相比具有如下优点和效果:
23.(1)本发明可以从二维x线图片中获得立体空间内的真实侧弯角度以及旋转角度,较以往测量方式得到的二维x线图片中所获得的运动系统畸形数据更为准确;可以为外科医师进行运动系统畸形的评估及制定手术治疗方案提供有力的帮助;
24.(2)本发明的操作过程简单,易于初学者掌握,可以缩短外科医师的学习曲线,提高诊疗正确率;
25.(3)本发明仅通过二维x线图片即可获得运动系统畸形在立体空间内的真实侧弯角度以及旋转角度,不需要进行ct检查,降低了患者的诊疗费用,节约了医疗成本,具有较高的社会经济效益。
附图说明
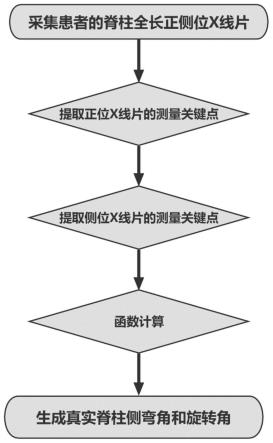
26.图1是本发明测量脊柱侧弯及旋转角度的方法示意图。
27.图2是本发明测量脊柱侧弯及旋转角度的系统示意图。
28.图3是本发明提供的脊柱关键点坐标的示意图。
29.图4是本发明提供的系统的用户操作界面模块示意图。
30.图5是本发明测量膝关节内翻膝畸形的示意图。
31.图6是本发明测量肘关节内翻膝畸形的示意图。
具体实施方式
32.为了便于理解本发明,下面将结合具体实施例对本发明进行详细说明。以下实施例将有助于本领域的技术人员进一步理解本发明,但是,不以任何形式限制本发明。应该指出的是,对本领域的技术人员来说,在不脱离本发明构思的前提下,本发明还可以做出若干变形和改进,这些都属于本发明的保护范围。
33.实施例1
34.如图1、2所示,该运动系统畸形为脊柱侧弯,采用本方法测量脊柱侧弯及旋转角度,包括下述步骤:
35.(1)采集患者的脊柱全长正、侧位x线片。患者进行x线放射检查后,其x线图片资料可通过从存储器导入,亦可直接通过手机拍照获取。操作者获取图片资料后,通过图像导入模块将图片导入本发明的系统。
36.(2)通过图像处理模块对导入的脊柱全长正位x线片和侧位x线片进行预处理,包括:放大、缩小、旋转、明暗调整、对比度调整等,使得图像更好的满足测量的要求。
37.(3)标记脊柱侧弯畸形的关键点,包括:正位x线片中,脊柱侧弯节段下端椎的下终板的两侧顶点a和b,a点和b点连线ab的中点o,脊柱侧弯节段上端椎的上终板的两侧顶点c和d,c点和d点连线cd的中点f,“过ab的中点o与ab相交的垂线”和“过cd的中点f与cd相交的垂线”的交点g;侧位x线片中,脊柱侧弯节段下端椎的下终板的两侧顶点h和i,h点和i点连线hi的中点o’,脊柱侧弯节段下端椎的下终板的两侧顶点j和k,j点和k点连线jk的中点f’,“过hi的中点o’与hi相交的垂线”和“过jk的中点f’与jk相交的垂线”的交点g’。
38.(4)通过坐标标记模块生成以上关键点的坐标,如图3所示,包括:正位x线片中,脊柱侧弯节段下端椎的下终板的两侧顶点a和b连线ab的中点o的坐标o(0,0),脊柱侧弯节段
上端椎的上终板的两侧顶点c和d连线cd的中点f的坐标f(x1,y1),“过ab的中点o与ab相交的垂线”和“过cd的中点f与cd相交的垂线”的交点g的坐标g(x2,y2);侧位x线片中,脊柱侧弯节段下端椎的下终板的两侧顶点h和i连线hi的中点o’的坐标o’(0,0),脊柱侧弯节段下端椎的下终板的两侧顶点j和k连线jk的中点f’的坐标f’(z1,y1),“过hi的中点o’与hi相交的垂线”和“过jk的中点f’与jk相交的垂线”的交点g’的坐标g’(z2,y1)。
39.(5)函数运算:将以上各关键点的坐标进行整合,生成三维空间坐标系,并通过函数运算模块进行运算,得到脊柱在立体空间内的真实侧弯角度scoliotic angle,函数如下:
40.scoliotic angle=arccos
41.通过函数运算模块进行运算,得到脊柱在立体空间内的真实旋转角度rotationg angle;函数如下:
42.rotationg angle=arctan(z2÷
x2)
43.同时,通过函数运算模块还可以得到:脊柱正位x线片上的cobb角cobb
ap
——正位x线片上脊柱侧弯节段中上端椎的上终板延长线与下端椎的下终板延长线的交角;脊柱侧位x线片上的cobb角cobb
lat
——侧位x线片上脊柱侧弯节段中上端椎的上终板延长线与下端椎的下终板延长线的交角。
44.(6)将以上函数运算结果通过结果输出模块进行显示,展示给操作者,显示内容包括:脊柱在立体空间内的真实侧弯角度scoliotic angle、脊柱在立体空间内的真实旋转角度rotationg angle、脊柱正位x线片上的cobb角cobb
ap
、脊柱侧位x线片上的cobb角cobb
lat
。
45.如图4所示,操作者可以通过用户操作界面模块实现以上步骤。
46.实施例2
47.如图5所示,运动系统畸形为膝关节内翻畸形,包括下述步骤:
48.(1)采集患者的膝关节正位x线片。患者进行x线放射检查后,其x线图片资料可通过从存储器导入,亦可直接通过手机拍照获取。操作者获取图片资料后,通过图像导入模块将图片导入本发明的系统;
49.(2)通过图像处理模块对导入的膝关节正位x线片进行预处理,包括:放大、缩小、旋转、明暗调整、对比度调整等,使得图像更好的满足测量的要求。
50.(3)标记膝关节内翻畸形的关键点,包括:胫骨平台内侧髁关键点a1,胫骨平台外侧髁关键点b1,股骨髁间窝关键点c1,股骨关键点d1。
51.(4)通过坐标标记模块生成以上关键点的坐标,包括:胫骨平台内侧髁关键点a1和外侧髁关键点b1连线a1b1的中点o的坐标o(0,0),股骨髁间窝关键点c1(x1,y1),股骨关键点d1(x2,y2)。
52.(5)函数运算:将以上各关键点的坐标进行整合,生成坐标系,并通过函数运算模块进行运算,得到膝关节内翻角度scoliotic angle,函数如下:
53.scoliotic angle=arccos
54.(6)将以上函数运算结果通过结果输出模块进行显示,展示给操作者,显示内容包括:膝关节内翻畸形内翻角度scoliotic angle。
55.实施例3
56.如图6所示,运动系统畸形为肘关节内翻畸形,包括下述步骤:
57.(1)采集患者的肘关节正位x线片。患者进行x线放射检查后,其x线图片资料可通过从存储器导入,亦可直接通过手机拍照获取。操作者获取图片资料后,通过图像导入模块将图片导入本发明的系统;
58.(2)通过图像处理模块对导入的肘关节正位x线片进行预处理,包括:放大、缩小、旋转、明暗调整、对比度调整等,使得图像更好的满足测量的要求。
59.(3)标记肘关节内翻畸形的关键点,包括:尺骨干关键点e1,尺骨鹰嘴窝关键点f1,肱骨滑车关键点r1,股骨干关键点s1。
60.(4)通过坐标标记模块生成以上关键点的坐标,包括:尺骨干关键点e1,尺骨鹰嘴窝关键点f1连线e1f1的中点o的坐标o(0,0),肱骨滑车关键点r1(x1,y1),股骨干关键点s1(x2,y2)。
61.(5)函数运算:将以上各关键点的坐标进行整合,生成坐标系,并通过函数运算模块进行运算,得到肘关节内翻角度scoliotic angle,函数如下:
62.scoliotic angle=arccos
63.(6)将以上函数运算结果通过结果输出模块进行显示,展示给操作者,显示内容包括:肘关节内翻畸形内翻角度scoliotic angle。
64.以上所述仅为本发明的实施例,但本发明的实施方式并不受上述实施例的限制,其他的任何未背离本发明的精神实质与原理下所作的改变、修饰、替代、组合、简化,均为等效的置换方式,都包含在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。