技术特征:
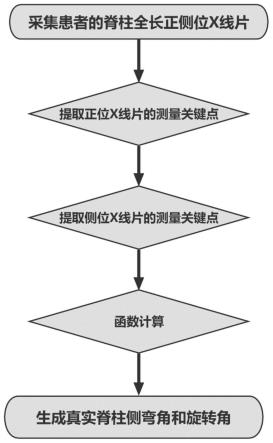
1.一种基于x线测量运动系统畸形弯曲及旋转角度的方法,其特征在于:获取患者某一部位运动系统畸形的正位x线片和/或侧位x线片,根据x线片确定患者的运动系统畸形关键点,并根据关键点构建三维坐标系,获得关键点的坐标数据;根据所述关键点的坐标数据,预测运动系统畸形在三维空间的弯曲角度和旋转角度。2.根据权利要求1所述的基于x线测量运动系统畸形弯曲及旋转角度的方法,其特征在于:所述运动系统畸形关键点包括:正位x线片中,运动系统畸形部位下端的两侧顶点a和b,a点和b点连线ab的中点o,运动系统畸形部位上端的两侧顶点c和d,c点和d点连线cd的中点f,垂线i和垂线ii的交点g,其中垂线i为过连线ab的中点o且与ab相交的垂线,垂线ii为过连线cd的中点f且与cd相交的垂线。3.根据权利要求1所述的基于x线测量运动系统畸形弯曲及旋转角度的方法,其特征在于:所述运动系统畸形关键点还包括:侧位x线片中,运动系统畸形部位下端的两侧顶点h和i,h点和i点连线hi的中点o’,运动系统畸形部位上端的两侧顶点j和k,j点和k点连线jk的中点f’,垂线iii和垂线vi的交点g’,其中垂线iii为过连线hi的中点o’且与hi相交的垂线,垂线vi为过连线jk的中点f’且与jk相交的垂线。4.根据权利要求2或3所述的基于x线测量运动系统畸形弯曲及旋转角度的方法,其特征在于:构建三维坐标系包括下述步骤:在正位片上以o点为原点,在侧位片上以o’点为原点,分别建立三维空间坐标系,得到关键点a、b、c、d、h、i、j、k、o、o’、f、f’、g、g’的坐标,包括:正位x线片中,运动系统畸形部位下端的两侧顶点a和b连线ab的中点o的坐标o(0,0),运动系统畸形部位上端的两侧顶点c和d连线cd的中点f的坐标f(x1,y1),垂线i和垂线ii的交点g的坐标g(x2,y2);侧位x线片中,运动系统畸形部位下端的两侧顶点h和i点连线hi的中点o’的坐标o’(0,0),运动系统畸形部位上端的两侧顶点j和k连线jk的中点f’的坐标f’(z1,y1),垂线iii和垂线vi的交点g’的坐标g’(z2,y1)。5.根据权利要求4所述的基于x线测量运动系统畸形弯曲及旋转角度的方法,其特征在于:所述运动系统畸形在三维空间的弯曲角度scoliotic angle的运算函数为下式:式中:arccos表示的是数学概念中反三角函数的反余弦;x1是正位x线片上运动系统畸形部位上端的两侧顶点c和d连线cd的中点f的横坐标值;y1是正位x线片上运动系统畸形部位上端的两侧顶点c和d连线cd的中点f的纵坐标值;x2是正位x线片上垂线i和垂线ii的交点g的横坐标值;y2是正位x线片上垂线i和垂线ii的交点g的纵坐标值;z1是侧位x线片上运动系统畸形部位上端的两侧顶点j和k连线jk的中点f’的横坐标值;z2是侧位x线片上垂线iii和垂线vi的交点g’的横坐标值。6.根据权利要求4所述的基于x线测量运动系统畸形弯曲及旋转角度的方法,其特征在于:运动系统畸形在三维空间的旋转角度rotationg angle的运算函数为下式:rotationg angle=arctan(z2÷
x2)式中:arctan表示的是数学概念中反三角函数的反正切;z2是侧位x线片上垂线iii和垂线vi的交点g’的横坐标值;x2是正位x线片上垂线i和垂线ii的交点g的横坐标值。7.一种基于x线测量运动系统畸形弯曲及旋转角度的系统,其特征在于包括:图像导入
模块、图像处理模块、坐标标记模块、函数运算模块、结果输出模块。8.根据权利要求7所述的基于x线测量运动系统畸形弯曲及旋转角度的系统,其特征在于:所述图像导入模块,是将患者的运动系统畸形部位x线片的图片资料导入系统中;所述图像处理模块,是对导入的x线片进行放大、缩小、旋转、明暗、对比度的预处理。9.根据权利要求7所述的基于x线测量运动系统畸形弯曲及旋转角度的系统,其特征在于:所述坐标标记模块,是观察者根据x线片对关键点进行标记,系统根据关键点建立三维空间坐标系,从而获得关键点的坐标数据;所述关键点包括:正位x线片中,运动系统畸形部位下端的两侧顶点a和b,a点和b点连线ab的中点o,运动系统畸形部位上端的两侧顶点c和d,c点和d点连线cd的中点f,垂线i和垂线ii的交点g,其中垂线i为过连线ab的中点o且与ab相交的垂线,垂线ii为过连线cd的中点f且与cd相交的垂线;侧位x线片中,运动系统畸形部位下端的两侧顶点h和i,h点和i点连线hi的中点o’,运动系统畸形部位上端的两侧顶点j和k,j点和k点连线jk的中点f’,垂线iii和垂线vi的交点g’,其中垂线iii为过连线hi的中点o’且与hi相交的垂线,垂线vi为过连线jk的中点f’且与jk相交的垂线。10.根据权利要求7所述的基于x线测量运动系统畸形弯曲及旋转角度的系统,其特征在于:所述函数运算模块,是将获得的关键点的坐标数据进行权利要求5或6所述的函数运算,包括真实弯曲角度、旋转角度的运算;所述结果输出模块,是将函数运算后获得的运动系统畸形真实弯曲角度、旋转角度的结果进行输出。
技术总结
本发明公开了一种基于X线测量运动系统畸形弯曲及旋转角度的方法和系统,是获取患者某一部位运动系统畸形的正位X线片和/或侧位X线片,根据X线片确定患者的运动系统畸形关键点,并根据关键点构建三维坐标系,获得关键点的坐标数据;根据所述关键点的坐标数据,预测运动系统畸形在三维空间的弯曲角度和旋转角度。本发明可以从二维X线图片中获得立体空间内的真实侧弯角度以及旋转角度,较以往测量方式得到的二维X线图片中所获得的运动系统畸形数据更为准确;可以为外科医师进行运动系统畸形的评估及制定手术治疗方案提供有力的帮助。估及制定手术治疗方案提供有力的帮助。估及制定手术治疗方案提供有力的帮助。
技术研发人员:周治宇 高蔓蔓 李俊宏 王建民 汪文涛 高向上
受保护的技术使用者:中山大学附属第七医院(深圳)
技术研发日:2022.05.25
技术公布日:2022/8/30
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。