1.本发明涉及道路交通领域,具体涉及一种基于行车安全场的道路交通风险预警方法及系统。
背景技术:
2.科学技术的不断发展使交通自由度逐渐增高,人们对于美好生活的要求也逐渐加强。但伴随着驾驶员数量和机动车保有量基数逐年增加的还有车祸发生的频率,道路交通安全状况依然严峻。关于道路交通风险监控与预警,具体体现在交通管理和风险防控两个方面。现有的交通管理办法主要针对驾驶人,即对驾驶人的安全防控意识及操作提出要求,对于交通风险主要采取预防的手段,并对驾驶人行为进行规范,这很大程度上防止了交通事故的发生,但却无法在实际行驶时为驾驶人的行车决策提供支持,在可视范围有限的前提下,驾驶人难以根据实际路况做出正确判断。
3.现有的风险防控方法主要是利用现有技术中的智能交通系统(its,intelligent traffic system)、先进驾驶辅助系统(adas,advanced driver assistant system)以及智能车协同系统(ivics,intelligent vehicle infrustructure cooperative systems)等驾驶辅助系统进行狭窄范围内的风险预警与防控,这虽然实现了车车、车路动态实时信息的交互,提高了通行效率,但道路交通环境越来越复杂。上述系统往往作用于单个机动车,仅考虑单个机动车所受到的风险和单个机动车对外界造成的风险,无法适应复杂道路交通环境中的各种突发情况,如多车依次跟车单向行驶时前车遇突发情况时紧急刹车、多车并列行驶时邻车突然变道、驾驶人周围其他驾驶人突然加速超车等。更不能对处于复杂道路交通环境中的车辆进行前瞻性的预示,无法对整体路段进行综合分析。
4.因此,为解决以上问题,需要一种基于行车安全场的道路交通风险预警方法及系统,能够实现对一定区域内整个道路交通环境的安全状态进行实时监测、评估,并对驾驶人进行预警。
技术实现要素:
5.有鉴于此,本发明的目的是克服现有技术中的缺陷,提供基于行车安全场的道路交通风险预警方法及系统,能够对整体区域内的人-车-路-环境进行全局监测分析,实现对驾驶员的及时预警,提高了道路交通安全性,降低了道路交通事故率。
6.本发明的基于行车安全场的道路交通风险预警方法,包括如下步骤:
7.s1.确定目标路段目标车辆对道路交通环境造成的风险f;
8.s2.确定目标路段所有车辆对道路交通环境造成的风险u;
9.s3.判断风险f所属的风险级别,若风险f达到危险级别,则向目标车辆的驾驶员发出预警信息;
10.判断风险u所属的风险级别,若风险u达到危险级别,则向所有车辆的驾驶员发出预警信息。
11.进一步,根据如下公式确定目标车辆对道路交通环境造成的风险f:
[0012][0013]
其中,ei为车辆i的动能;r0为车辆i与道路交通环境中任一点j的距离;x
ij
为车辆i纵向上与道路交通环境中任一点j的距离;y
ij
为车辆i横向上与道路交通环境中任一点j的距离;k
x
为纵向的梯度调整系数;ky为横向的梯度调整系数;r
max
为自由流车辆间距。
[0014]
进一步,根据如下公式确定所有车辆对道路交通环境造成的风险u:
[0015]
u=∑ui;
[0016]
其中,ui为道路交通环境中任一点j受到车辆i影响获得的势能;
[0017]
所述
[0018]
进一步,所述步骤s3,具体包括:
[0019]
针对车辆划分车辆风险等级;所述车辆风险等级包括安全ⅰ、危险ⅰ以及非常危险ⅰ;
[0020]
判断风险f所属的风险级别,若风险f属于危险ⅰ或风险f属于非常危险ⅰ,则向目标车辆的驾驶员发出预警信息;
[0021]
针对目标路段划分路段风险等级;所述路段风险等级包括安全ⅱ、危险ⅱ以及非常危险ⅱ;
[0022]
判断风险u所属的风险级别,若风险u属于危险ⅱ或风险u属于非常危险ⅱ,则向所有车辆的驾驶员发出预警信息。
[0023]
进一步,还包括:采集目标路段的环境与车辆信息,并依据环境与车辆信息,识别目标路段道路交通突发情况,并向车辆驾驶员发出预警。
[0024]
一种基于行车安全场的道路交通风险预警系统,包括依次通信连接的采集单元、监控单元以及车载单元;
[0025]
所述采集单元,用于采集目标路段的对象状态信息以及目标路段的环境与车辆信息;
[0026]
所述监控单元,用于对对象状态信息进行道路交通风险分析,得到风险分析结果,并将风险分析结果发送至车载单元;
[0027]
所述车载单元,用于根据风险分析结果发出预警信息。
[0028]
进一步,所述对象包括行人、骑车人、车辆、障碍物以及交通设施;所述对象状态信息包括速度、尺寸、类别以及质量。
[0029]
进一步,所述车载单元包括车载终端、灯光显示装置以及语音播报装置;所述车载终端分别与监控单元、灯光显示装置以及语音播报装置通信连接;
[0030]
所述车载终端,用于根据监控单元发送的风险分析结果,向灯光显示装置发送灯光预警控制信号以及向语音播报装置发送语音预警控制信号。
[0031]
进一步,所述监控单元,还用于对环境与车辆信息进行分析,识别目标路段道路交通突发情况;所述车载单元,还用于根据目标路段道路交通突发情况向车辆驾驶员发出预
警。
[0032]
本发明的有益效果是:本发明公开的一种基于行车安全场的道路交通风险预警方法及系统,通过针对不同交通地形采用固定式或移动式监测装置,以实时监测道路交通中行人、骑车人、车辆等不同行进单位的行进状态,获取信息数据,并进行风险量化评估,建立行车安全场,进而对道路条件及潜在交通事故中的危险因素进行准确、全面的状态判断,实现对驾驶员的及时预警,提高了道路交通安全性,降低了道路交通事故率。
附图说明
[0033]
下面结合附图和实施例对本发明作进一步描述:
[0034]
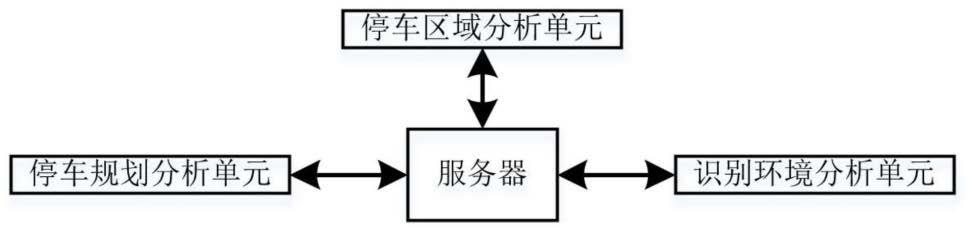
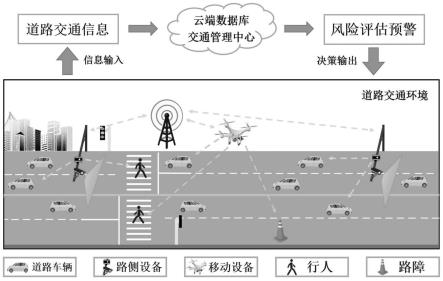
图1是本发明的整体分析流程示意图;
[0035]
图2是本发明的固定监测装置安装示意图;
[0036]
图3是本发明的移动监测装置安装示意图;
[0037]
图4是本发明的风险评估态势示意图;
[0038]
图5是本发明的车载预警装置的安装示意图。
具体实施方式
[0039]
以下结合说明书附图对本发明做出进一步的说明,如图所示:
[0040]
本发明的基于行车安全场的道路交通风险预警方法,包括如下步骤:
[0041]
s1.确定目标路段目标车辆对道路交通环境造成的风险f;
[0042]
s2.确定目标路段所有车辆对道路交通环境造成的风险u;
[0043]
s3.判断风险f所属的风险级别,若风险f达到危险级别,则向目标车辆的驾驶员发出预警信息;
[0044]
判断风险u所属的风险级别,若风险u达到危险级别,则向所有车辆的驾驶员发出预警信息。
[0045]
本实施例中,步骤s1中,通过采集目标路段的对象状态信息以及目标路段的环境与车辆信息,来分析目标路段目标车辆对道路交通环境造成的风险f。在真实道路交通环境中,由于车辆运动具有方向性,其对外界造成的风险不具备各向同性,而通常情况下,无论是基于人的主观感受,还是基于客观的碰撞概率,车辆在运动过程中,其在运动方向的正方向上对外界造成的风险大于负方向,这种现象与波的多普勒频移效应相似。因此,车辆在运动方向的正方向上对外界造成的风险大于负方向的观点,可以描述为行车安全场场力的梯度下降程度与车辆的运动方向有关,即:车辆i接近点j时,行车安全场场力的梯度下降变缓,所以我们基于此设立了纵横向梯度调整系数k
x
以及ky,并将目标路段目标车辆i对道路交通环境中任一点j产生的等效力描述为目标车辆对道路交通环境造成的风险f。
[0046]
根据如下公式确定目标车辆对道路交通环境造成的风险f:
[0047][0048]
其中,ei为车辆i的动能,所述动能的计算采用现有的动能公式;r0为车辆i与道路交通环境中任一点j的距离;x
ij
为车辆i纵向上与道路交通环境中任一点j的距离;y
ij
为车辆i横向上与道路交通环境中任一点j的距离;k
x
为纵向的梯度调整系数;ky为横向的梯度调
整系数;r
max
为自由流车辆间距。所述系数k
x
以及ky可根据实际工况进行设定,根据道路交通相关规范,所述vf为自由流流速。
[0049]
本实施例中,上述计算的目标路段目标车辆对道路交通环境造成的风险f,只是单个车辆对道路交通环境造成的风险,为了从整体上对目标路段的道路交通环境进行风险评估,需要考虑目标路段中所有车辆对于道路交通环境的影响。
[0050]
由于目标车辆对道路交通环境造成的风险f是矢量,在各方向会相互抵消,所以转化为场力势能进行计算,具体地,在行车安全场中,道路交通环境中任一点j受到场源车辆i影响获得的势能为:
[0051][0052]
其中,ui为道路交通环境中任一点j受到场源车辆i影响获得的势能。
[0053]
将上述积分结果写为直角坐标的形式,则有:
[0054][0055]
对道路交通环境中所有行驶车辆所产生的风险进行加和,可以得到整体风险,也即是,根据如下公式确定所有车辆对道路交通环境造成的风险u:
[0056]
u=∑ui;
[0057]
所述u越大,道路交通环境整体风险就越大。
[0058]
本实施例中,所述步骤s3,具体包括:
[0059]
针对车辆划分车辆风险等级;所述车辆风险等级包括安全ⅰ、危险ⅰ以及非常危险ⅰ;其中,通过根据实际工况设定阶梯式风险阈值,来划分车辆风险等级;
[0060]
判断风险f所属的风险级别,若风险f属于危险ⅰ或风险f属于非常危险ⅰ,则向目标车辆的驾驶员发出预警信息;其中,若风险f属于安全ⅰ,则无需向目标车辆的驾驶员发出预警信息;
[0061]
针对目标路段划分路段风险等级;所述路段风险等级包括安全ⅱ、危险ⅱ以及非常危险ⅱ;其中,通过根据实际工况设定阶梯式风险阈值,来划分路段风险等级;
[0062]
判断风险u所属的风险级别,若风险u属于危险ⅱ或风险u属于非常危险ⅱ,则向所有车辆的驾驶员发出预警信息。其中,若风险u属于安全ⅱ,则无需向所有车辆的驾驶员发出预警信息。
[0063]
本实施例中,所述预警方法还包括:采集目标路段的环境与车辆信息,并依据环境与车辆信息,识别目标路段道路交通突发情况,并向车辆驾驶员发出预警。其中,所述环境与车辆信息包括道路环境工况信息以及车辆运行状态信息;所述突发情况包括山体滑坡、泥石流、前方突发车祸以及堵车。
[0064]
本发明还涉及了一种基于行车安全场的道路交通风险预警系统,所述系统与上述道路交通风险预警方法相对应,可理解为是实现上述方法的系统,所述系统包括依次通信连接的采集单元、监控单元以及车载单元;
[0065]
所述采集单元,用于采集目标路段的对象状态信息以及目标路段的环境与车辆信息;
[0066]
所述监控单元,用于对对象状态信息进行道路交通风险分析,得到风险分析结果,并将风险分析结果发送至车载单元;
[0067]
所述车载单元,用于根据风险分析结果发出预警信息。
[0068]
所述采集单元包括激光雷达、毫米波雷达以及工业摄像头;如图2所示,可将采集单元中的设备固定安装于目标环境中,形成固定监测装置,比如,在一定区域道路一侧安装支撑杆a,支撑杆a与悬挂杆b连接,在悬挂杆b末端位置设置悬挂位c以及d,在悬挂位c安装激光雷达,在悬挂位d安装工业摄像头。所述目标环境包括直路、急弯、陡坡以及隧道。如图3所示,可将采集单元中的设备设置于无人机,形成移动监测装置,比如,将激光雷达、毫米波雷达以及工业摄像头等监测装置搭载于无人机的悬挂位f,无人机可自由进行“巡逻”移动,也可受控移动至指定位置进行固定监测,以解决固定监测设备的监测死角问题,多角度、全方位地监测道路环境,获取道路交通环境中任一对象的状态信息;所述状态信息包括实时行进状态和数据信息。
[0069]
本实施例中,所述对象包括行人、骑车人、车辆、障碍物以及交通设施;所述对象状态信息包括速度、尺寸、类别以及质量。其中,所述障碍物为非其他对象类别的路面静止物体,包括可移动的护栏和锥形筒;所述交通设施包括交通信号灯、静态交通标牌;所述速度包括速度的大小与速度的方向。
[0070]
本实施例中,所述监控单元包括云端服务器;所述云端服务器采用现有的云服务;所述云端服务器通信低延时、低丢包率、实现实时存储数据,以保证准确、迅速的收集数据;
[0071]
为了保证采集单元、监控单元以及车载单元之间的通信需求,选取合适的地点建立通信基站,所述通信基站需配备安装信号接收天线和信号发射器,所述采集单元、监控单元以及车载单元之间通过通信基站进行通信。
[0072]
本实施例中,所述车载单元包括车载终端、灯光显示装置以及语音播报装置;所述车载终端分别与监控单元、灯光显示装置以及语音播报装置通信连接;其中,所述车载终端采用现有的车载控制设备,所述灯光显示装置采用现有的灯光报警设备,所述语音播报装置采用现有的语音播放设备,在此不再赘述。
[0073]
所述车载终端,用于根据监控单元发送的风险分析结果,向灯光显示装置发送灯光预警控制信号以及向语音播报装置发送语音预警控制信号。所述灯光显示装置根据灯光预警控制信号发出灯光信息,所述语音播报装置依据语音预警控制信号发出语音信息。如图5所示,q为车载终端,所述车载终端可以为驾驶人提供云端计算的即时风险态势图,也可以切换至后台运行模式,向灯光显示装置以及语音播报装置发出控制信号;在车辆的a柱p位置安装灯光显示装置以及语音播报装置。
[0074]
具体地,针对于车辆以及路段的道路交通风险预警为:
[0075]
若单个车辆风险评估结果为“安全”,则灯光显示装置不显示灯光或显示微弱柔和的绿光,语音播报装置保持无声状态,以保证在进行实时评估时不影响驾驶员的正常驾驶操作。
[0076]
若单个车辆风险评估结果为“危险”,则灯光显示装置显示黄光,语音播报装置播放“请注意”,并实时向驾驶员预报风险位置。
[0077]
若单个车辆风险评估结果为“非常危险”,则灯光显示装置显示红光,语音播报装置播放“请制动/加速/转向规避”等,并实时向驾驶员预报风险位置;例如“前方有车减速,请缓慢制动”、“左侧邻车危险切入,请适当减速”等。
[0078]
若目标路段风险评估结果为“安全”,则灯光显示装置不显示灯光或显示微弱柔和的绿光,语音播报装置保持无声状态,以保证在进行实时评估时不影响驾驶员的正常驾驶操作。
[0079]
若目标路段风险评估结果为“危险”,则灯光显示装置显示蓝光,语音播报装置播放“请注意,当前路段风险等级为危险”。
[0080]
若目标路段风险评估结果为“非常危险”,则灯光显示装置显示紫光,语音播报装置播放“请小心行驶,当前路段风险等级为非常危险”。
[0081]
本实施例中,所述监控单元,还用于对环境与车辆信息进行分析,识别目标路段道路交通突发情况;所述车载单元,还用于根据目标路段道路交通突发情况向车辆驾驶员发出预警。其中,所述监控单元还包括控制平台,所述控制平台包括控制主机以及中央显示屏;道路安全监测人员通过中央显示屏显示的工业摄像头采集的环境与车辆信息进行道路交通突发情况的判断与识别,在必要时为驾驶员提供风险预警,也能为复杂交通环境下的交通疏导提供帮助。所述控制平台采用现有的控制设备,在此不再赘述。
[0082]
最后说明的是,以上实施例仅用以说明本发明的技术方案而非限制,尽管参照较佳实施例对本发明进行了详细说明,本领域的普通技术人员应当理解,可以对本发明的技术方案进行修改或者等同替换,而不脱离本发明技术方案的宗旨和范围,其均应涵盖在本发明的权利要求范围当中。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。