1.本发明涉及交通设施技术领域,特别涉及一种用于公路改扩建工程的防误闯智能预警系统及方法。
背景技术:
2.截至2020年底,我国高速公路总里程超过16万公里,持续位列世界第一。然而,随着交通流量的逐年增长,现有的高速公路网已不能满足日益增长的交通需求,出现了越来越多的改扩建工程。与新建工程相比,高速公路改扩建工程通常采用
″
边通车边施工
″
的方式,交通组织复杂多变,施工与运营相互干扰严重,尤以通行车辆误闯入施工作业控制区事故尤为突出,某省高速公路改扩建工程施工期间发生碰撞固定物闯入施工作业控制区事故达到1057起,造成严重的人员伤亡和财产损失,安全形势异常严峻。然而,当前通行车辆误闯入工作区事故预防技术尚不完善、有效预警装置缺乏、主动预警系统多场景适用性不足等问题突出。具体表现为:
3.问题1:事故预防技术尚不完善,现有预警设备和所使用的技术不具备准确、远距离、分区域识别危险车辆,并进行远端分级警告驱离功能,导致设备触发报警时车辆已经闯入施工作业控制区、或车辆在临近区域正常通行却发出报警信号的情况时常发生,主动预警效果较差;现有报警设备不具备分级报警功能,不能针对不同的报警情景的需要,分别向相关车辆或人员发出报警信号。
4.问题2:有效预警装置缺乏,常规的警示、预告标志、标牌等临时交通安全设施只显示固定的内容,通行车辆驾驶人员通常不能及时、有效的观察到,当发生车辆不及时变道、可能闯入施工作业控制区时,也不能及时对驾驶员发出警示信号;当发生车辆闯入施工作业控制区事故时,对事故车辆进行精准识别并向临近施工作业人员发出有效逃离预警信号的设施缺乏。
5.问题3:主动预警系统多场景适用性不足,表现在现有设备使用场景单一,现有设备仅通过自身携带的高音喇叭在一个固定点位同时向车辆和人员发出警报,报警覆盖范围较小、设备单一,对于公路改扩建中央分隔带转换口、上游过渡区等复杂场景,不能满足进行远距离、多点位分别向车辆和施工作业人员发出报警信息的需要;现有设备不具备协同联动功能,不能根据特定场景报警需要,进行多数量报警装置的组合组网使用。
技术实现要素:
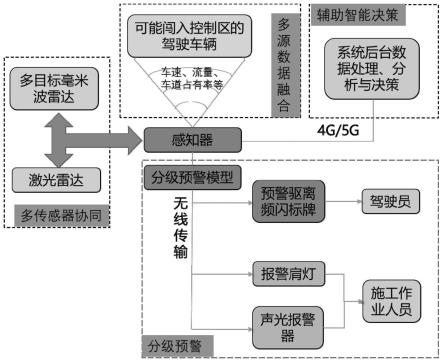
6.为解决上述问题,本发明旨在提出一种用于公路改扩建工程的防误闯智能预警系统及方法,通过感知器对可能闯入施工作业控制区车辆的速度、车型以及道路上的交通流量、车道占有率等进行监测、识别,根据设定的三个级别预警阈值,通过无线传输方式,实现声光报警器、报警肩灯以及预警驱离频闪标牌联动控制并发出分级报警信号,通过系统后台记录感知器的检测数据。
7.为达到上述目的,本发明的技术方案是这样实现的:
8.一种用于公路改扩建工程的防误闯智能预警系统,包括感知器、声光报警器、报警肩灯、预警驱离频闪标牌以及系统后台,所述感知器安装于改扩建公路上,通过内置的激光雷达和多目标毫米波雷达对可能闯入施工作业控制区车辆的速度、车型以及道路上的交通流量、车道占有率进行监测、识别;所述感知器内设定有三个级别预警阈值,通过无线传输方式与用于预警的声光报警器、报警肩灯、预警驱离频闪标牌联动控制并发出分级报警信号;所述系统后台与感知器通讯相连用于记录检测相关数据。
9.进一步的,所述多目标毫米波雷达通过预警距离和速度及激光雷达监测阈值,利用速度、距离以及监测宽度指标参数与报警时间的映射关系,得出基于时间与空间特征的三级预警标准。
10.进一步的,所述预警驱离频闪标牌包括一级预警驱离频闪标牌以及二级预警驱离频闪标牌,所述毫米波雷达设定有一级预警距离和速度,当毫米波雷达识别出车辆同时满足一级预警距离和速度时,将发送给一级预警驱离频闪标牌;所述毫米波雷达设定有二级预警距离和速度,当毫米波雷达识别出车辆同时满足二级预警距离和速度时,将发送给二级预警驱离频闪标牌。
11.进一步的,所述激光雷达扫描监测长度,通过设置设定的扫描监测长度,当误闯车辆出现在激光雷达扫描区域内,将三级报警信息发送给声光报警器、报警肩灯,告知施工作业人员立即撤离现场。
12.进一步的,所述声光报警器设置在施工作业人员附近,报警肩灯设置在施工作业人员肩上,预警驱离频闪标牌设置在路侧和封闭车道锥桶内侧。
13.进一步的,所述感知器配设有控制面板,所述控制面板上设置毫米波雷达检测宽度、毫米波雷达一级预警距离和速度、毫米波雷达二预警距离和速度、激光雷达扫描监测长度,并设置有毫米波雷达、报警肩灯以及声光报警器开关按钮。
14.为了实现上述目的,本发明还提供了一种用于公路改扩建工程的防误闯智能预警方法,使用如上述的用于公路改扩建工程的防误闯智能预警系统,具体包括以下步骤:
15.s1、根据现场施工作业控制区布设形式确定感知器布设位置;
16.s2、将感知器的多目标毫米波雷达监测方向设为逆车流对警告区交通状况持续扫描监测;
17.s3、将感知器的激光雷达监测方向设定为沿上游过渡区锥桶方向进行持续监测;
18.s4、根据现场监测需要,设定感知器多目标毫米波雷达监测宽度、一级预警驱离阈值、二级预警驱离阈值和激光雷达监测长度阈值;
19.s5、根据现场驱离预警需要,架设一级预警驱离频闪标牌a;
20.s6、布设二级预警驱离频闪标牌b;
21.s7、将声光报警器布设在施工作业人员附近,将报警肩灯挂设在施工人员肩上部位;
22.s8、当感知器识别到车辆持续接近上游过渡区且未进行换道,达到一级预警驱离标准时,首先向标牌a发出驱离警告信号,常绿箭头模式变为红叉频闪模式,提示车辆变道;当车辆未进行变道,近距离接近上游过渡区达到二级预警驱离标准时,感知器向标牌b发出警告信号,常绿箭头模式变为红叉频闪模式提示车辆及时变道;当车辆由于某种原因,未变道而闯入了施工作业控制区,感知器激光雷达立即识别,触发三级预警标准,感知器向声光
报警器、报警肩灯发出信号,进而提示作业人员及时撤离;系统后台对车辆闯入时间、部位、速度以及设备运行状况等数据进行统计,对路段闯入交通事故特征进行分析,为现场防护和交通管控提供依据,并对设备运行状态进行监测。
23.进一步的,所述s4步骤中的激光雷达监测长度阈值根据现场实际情况确定,其长度阈值为感知器的位置与过渡区结束点位之间的距离;多目标毫米波雷达监测宽度可用来区分目标所监测的目标车道;一、二级预警驱离阈值通过设定车辆距离感知器的距离与速度实现,当通行车辆进入设定的监测预警范围阈值且其速度超过设定的速度阈值时,即可触发感知器向预警驱离频闪标牌报警功能。
24.进一步的,所述二级预警驱离阈值最小设定值应按照最不利情况设定,即驾驶员收到二级驱离信号后未能变道,而是采取减速措施,并停驶于过渡区锥桶前的情景,其计算方法见下式:
[0025][0026]
s2为感知器二级预警驱离阈值中
″
距离
″
设定数值最小建议值,v2为感知器二级预警阈值中
″
速度
″
设定数值,t2为通行车辆触发感知器二级报警后到驾驶员采取制动措施所需要的时间,a车辆平均减速度。
[0027]
进一步的,所述s5步骤中的一级预警驱离频闪标牌a通过支架形式设置于感知器逆车流方向的路右侧,使其标志牌的频闪标志正对着车辆驶来方向,预警驱离频闪标牌距离感知器最远位置,可按照下式确定:
[0028]
l1=s
1-v1·
t1[0029]
式中,l1为一级预警驱离频闪标牌距离与感知器最远的距离,s1为感知器一级预警阈值中
″
距离
″
设定数值,v1为感知器一级预警阈值中
″
速度
″
设定数值,t1为通行车辆触发感知器一级报警后到驾驶员观察到标牌模式变化所需要的时间。
[0030]
有益效果:本发明相较于其他防护设施,车辆闯入施工作业控制区事故率平均降低了达60%,车辆闯入施工作业控制区后对施工人员报警准确率达98%,显著降低了改扩建工程交通安全风险和事故损失,有效提高了改扩建工程交通安全风险预控水平,对保障人民群众生命财产安全具有重大意义。
附图说明
[0031]
构成本发明的一部分的附图用来提供对本发明的进一步理解,本发明的示意性实施例及其说明用于解释本发明,并不构成对本发明的不当限定。在附图中:
[0032]
图1为本发明实施例所述的用于公路改扩建工程的防误闯智能预警系统的功能原理图;
[0033]
图2为本发明实施例所述的用于公路改扩建工程的防误闯智能预警系统的感知器功能模块图;
[0034]
图3为本发明实施例所述的用于公路改扩建工程的防误闯智能预警系统的应用示意图(正常状态以及事故状态);
[0035]
图4为本发明实施例所述的用于公路改扩建工程的防误闯智能预警方法的主要流程图。
具体实施方式
[0036]
需要说明的是,在不冲突的情况下,本发明中的实施例及实施例中的特征可以相互组合。
[0037]
下面将参考附图并结合实施例来详细说明本发明。
[0038]
实施例1
[0039]
参见图1-3:一种用于公路改扩建工程的防误闯智能预警系统,包括感知器、声光报警器、报警肩灯、预警驱离频闪标牌以及系统后台,所述感知器安装于改扩建公路上,通过内置的激光雷达和多目标毫米波雷达对可能闯入施工作业控制区车辆的速度、车型以及道路上的交通流量、车道占有率进行监测、识别;所述感知器内设定有三个级别预警阈值,通过无线传输方式与用于预警的声光报警器、报警肩灯、预警驱离频闪标牌联动控制并发出分级报警信号;所述系统后台与感知器通讯相连用于记录检测相关数据。
[0040]
本实施例的感知器配设有激光雷达和多目标毫米波雷达,能够对可能闯入施工作业控制区车辆的速度、车型以及道路上的交通流量、车道占有率进行有效监测、识别,根据设定的三个级别预警阈值,通过无线传输方式,实现声光报警器、报警肩灯以及预警驱离频闪标牌联动控制并发出分级报警信号,通过系统后台记录感知器的检测数据,从而实现了公路改扩建工程的防误闯多级智能预警。
[0041]
需要说明的是,本实施例的感知器包括中央处理器、开关模块、通信模块、多目标毫米波雷达、激光雷达、数据存储模块、预警阈值参数设置模块以及电源模块。感知器配备的激光雷达可有效探测距离150m,可实现360
°
角度调整,将激光雷达射线沿施工作业控制区过渡段边界发射,可获得车辆闯入控制区信息;毫米波雷达的有效探测距离可达280m,将毫米波雷达对准车道,可获得车道中通行车辆的速度、位置等信息。
[0042]
需要说明的是,本实施例的系统后台通过4g/5g网络,接收来自感知器所检测到的交通和事故数据以及设备运行数据,实现自动分析某一时间段、路段的事故特征及道路交通流特征,为后期现场防护和管控提供决策依据。
[0043]
在一具体的实例中,所述多目标毫米波雷达通过预警距离和速度及激光雷达监测阈值,利用速度、距离以及监测宽度指标参数与报警时间的映射关系,得出基于时间与空间特征的三级预警标准。
[0044]
在一具体的实例中,所述预警驱离频闪标牌包括一级预警驱离频闪标牌以及二级预警驱离频闪标牌,所述毫米波雷达设定有一级预警距离和速度,当毫米波雷达识别出车辆同时满足一级预警距离和速度时,将发送给一级预警驱离频闪标牌;所述毫米波雷达设定有二级预警距离和速度,当毫米波雷达识别出车辆同时满足二级预警距离和速度时,将发送给二级预警驱离频闪标牌。
[0045]
在一具体的实例中,所述激光雷达扫描监测长度,通过设置设定的扫描监测长度,当误闯车辆出现在激光雷达扫描区域内,将三级报警信息发送给声光报警器、报警肩灯,告知施工作业人员立即撤离现场。
[0046]
在一具体的实例中,所述声光报警器设置在施工作业人员附近,报警肩灯设置在施工作业人员肩上,预警驱离频闪标牌设置在路侧和封闭车道锥桶内侧。
[0047]
本实施例的声光报警器、报警肩灯通过接收来自感知器发出的三级报警撤离信号;
[0048]
声光报警器发出红蓝爆闪灯光和高音报警声响,提示作业人员及时撤离,声光报警器将持续发出1min的报警信息,施工作业人员可通过手动方式随时终止报警;
[0049]
报警肩灯利用振动、报警声音和红蓝闪光的形式提示作业人员及时撤离,报警肩灯将持续发出1min的报警信息,施工作业人员可通过手动方式随时终止报警。
[0050]
预警驱离频闪标牌通过接收来自感知器发出的一级、二级预警驱离信号,标牌由常绿箭头模式变为红叉频闪模式,以提示车辆及时的变换车道。当车辆驶离后,标牌由红叉频闪模式变为常绿箭头模式。两种模式在夜间和日间均具有较强的可视性。
[0051]
在一具体的实例中,所述感知器配设有控制面板,所述控制面板上设置毫米波雷达检测宽度、毫米波雷达一级预警距离和速度、毫米波雷达二预警距离和速度、激光雷达扫描监测长度,并设置有毫米波雷达、报警肩灯以及声光报警器开关按钮。
[0052]
综上所述,本实施例的防误闯智能预警系统具有三个预警级别,分别为一级、二级车辆驱离预警、三级施工作业人员撤离预警。分级预警功能主要通过设计研发的感知器实现,感知器集成的多目标毫米波雷达有效探测距离可达280m、激光雷达有效探测距离可达150m,通过设定多目标毫米波雷达监测宽度、距离、激光雷达监测距离等数据参数,可以实现远距离车辆精准识别和车辆闯入作业控制区识别,作为感知器分级预警模型确定预警分级标准计算依据。通过研发的预警驱离频闪标牌超前布置,并接收来自感知器的报警信号,通过改变频闪模式,可以远距离提示车辆及时采取变道措施。
[0053]
本实施例研发的预警驱离频闪标牌可以设置在路侧和封闭车道锥桶内侧等处,通过接收来自感知器发出的一级、二级驱离报警信号,标牌由常绿箭头模式变为红叉频闪模式,可以及时吸引驾驶员的注意力,以提示车辆及时的变换车道。当发生车辆闯入施工作业控制区后,感知器激光雷达可以精准识别并触发三级预警,通过无线通讯方式向施工报警肩灯、声光报警器发出三级报警信号,及时的提示作业人员及时逃离。
[0054]
本实施例的感知器设有控制面板,可以实现多目标毫米波雷达、激光雷达、预警驱离频闪标牌报警功能、报警肩灯报警功能、声光报警器报警功能的关闭和开启,利用lora通信协议对组网的报警设备进行协同联动和自由组网,覆盖范围最远距离达10km。可以根据多场景报警需要,关闭和开启预警驱离频闪标牌报警功能、报警肩灯报警功能、声光报警器报警功能,同预警级别的报警设备可以根据需要调整布设数量,实现多点位、远距离、多级别报警功能。
[0055]
实施例2
[0056]
为了实现上述目的,参见图4:本实施例还提供了一种用于公路改扩建工程的防误闯智能预警方法,使用如上述的用于公路改扩建工程的防误闯智能预警系统,具体包括以下步骤:
[0057]
s1、根据现场施工作业控制区布设形式确定感知器布设位置;
[0058]
本实施例中将感知器布设在上游过渡区锥桶与波形梁护栏交叉处。
[0059]
s2、将感知器的多目标毫米波雷达监测方向设为逆车流对警告区交通状况持续扫描监测;
[0060]
s3、将感知器的激光雷达监测方向设定为沿上游过渡区锥桶方向进行持续监测;
[0061]
s4、根据现场监测需要,设定感知器多目标毫米波雷达监测宽度、一级预警驱离阈值、二级预警驱离阈值和激光雷达监测长度阈值等关键参数;所述s4步骤中的激光雷达监
测长度阈值根据现场实际情况确定,其长度阈值为感知器的位置与过渡区结束点位之间的距离;多目标毫米波雷达监测宽度可用来区分目标所监测的目标车道;一、二级预警驱离阈值通过设定车辆距离感知器的距离与速度实现,当通行车辆进入设定的监测预警范围阈值且其速度超过设定的速度阈值时,即可触发感知器向预警驱离频闪标牌报警功能,所述二级预警驱离阈值最小设定值应按照最不利情况设定,即驾驶员收到二级驱离信号后未能变道,而是采取减速措施,并停驶于过渡区锥桶前的情景,其计算方法见下式:
[0062][0063]
s2为感知器二级预警驱离阈值中
″
距离
″
设定数值最小建议值,v2为感知器二级预警阈值中
″
速度
″
设定数值,t2为通行车辆触发感知器二级报警后到驾驶员采取制动措施所需要的时间,a车辆平均减速度。
[0064]
需要说明的是,在现场实际应用中,可根据道路限速、交通组成等,综合确定一级预警驱离阈值和二级预警驱离阈值。同时,为了使车辆在接收到二级报警信号后有足够的时间采取减速、变道等措施,防止冲闯入施工作业控制区,本实施例给出了二级预警
″
距离
″
阈值最小取值建议,从而在保证道路施工人员安全的前提下,最大限度不过度占用影响公路的正常使用。
[0065]
s5、根据现场驱离预警需要,架设一级预警驱离频闪标牌a;所述s5步骤中的一级预警驱离频闪标牌a通过支架形式设置于感知器逆车流方向的路右侧,使其标志牌的频闪标志正对着车辆驶来方向,预警驱离频闪标牌距离感知器最远位置,可按照下式确定:
[0066]
l1=s
1-v1·
t1[0067]
式中,l1为一级预警驱离频闪标牌距离与感知器最远的距离,s1为感知器一级预警阈值中
″
距离
″
设定数值,v1为感知器一级预警阈值中
″
速度
″
设定数值,t1为通行车辆触发感知器一级报警后到驾驶员观察到标牌模式变化所需要的时间。
[0068]
在实际应用中,为了增强对通行车辆的警示驱离效果,一级预警驱离频闪标牌可根据需要顺车流方向依次布设多块。布设的多块一级预警驱离频闪标牌可同时接收来自感知器的预警驱离信号,并具有同步的频闪频率。
[0069]
s6、布设二级预警驱离频闪标牌b;
[0070]
需要说明的是,二级预警驱离频闪标牌b设置于上游过渡区内侧已封闭车道中间位置,使其标志牌的频闪标志正对着通行车辆。二级预警驱离频闪标牌也可根据需要沿过渡区方向依次布设多块,同时接收来自感知器的预警驱离信号,并具有同步的频闪频率。
[0071]
s7、将声光报警器布设在施工作业人员附近,将报警肩灯挂设在施工人员肩上部位;
[0072]
s8、当感知器识别到车辆持续接近上游过渡区且未进行换道,达到一级预警驱离标准时,首先向标牌a发出驱离警告信号,常绿箭头模式变为红叉频闪模式,提示车辆变道;当车辆未进行变道,近距离接近上游过渡区达到二级预警驱离标准时,感知器向标牌b发出警告信号,常绿箭头模式变为红叉频闪模式提示车辆及时变道;当车辆由于某种原因,未变道而闯入了施工作业控制区,感知器激光雷达立即识别,触发三级预警标准,感知器向声光报警器、报警肩灯发出信号,进而提示作业人员及时撤离;系统后台对车辆闯入时间、部位、速度以及设备运行状况等数据进行统计,对路段闯入交通事故特征进行分析,为现场防护
和交通管控提供依据,并对设备运行状态进行监测。
[0073]
本实施例通过以上预警方法的应用,相较于其他防护设施,车辆闯入施工作业控制区事故率平均降低了达60%,车辆闯入施工作业控制区后对施工人员报警准确率达98%,显著降低了改扩建工程交通安全风险和事故损失,有效提高了改扩建工程交通安全风险预控水平,对保障人民群众生命财产安全具有重大意义。
[0074]
以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。