1.本公开一般地涉及一种电池管理系统。
背景技术:
2.专利文件1(日本专利第6093448号)公开了一种比较性电池管理系统。该比较性文献的公开内容通过引用并入本文,作为对本公开中的技术要素的解释。
3.考虑到要安装到车辆等的可安装性,比较性电池管理系统与要监视的电池一起(即,与监视目标一起)容纳在壳体中。即,构成电池管理系统的多个电池元(battery cell)管理装置(即监视装置)和组装式电池管理装置(即控制装置)布置在容纳电池的壳体中。以这种方式,在壳体中的多个监视装置和一个控制装置之间进行无线通信。当多个监视装置在启动(start-up)时刻被激活时,每个监视装置周期性地执行通告操作,这可能会造成无线电波干扰。在上述观点或未提及的其他观点中,电池管理系统需要进一步改进。
技术实现要素:
4.本公开的一个目的在于提供一种能够抑制启动时的无线电波干扰的电池管理系统。
5.本文公开的电池管理系统包括:
6.布置在用于容纳电池的壳体中的监视装置,并且每个监视装置分别包括:
7.(i)监视电路,其能够获取表示电池的状态的电池信息,以及
8.(ii)监视器收发器,其能够通过向所述监视电路发送数据和从所述监视电路接收数据来执行无线通信;和
9.控制装置,其设置在壳体中,并且通过与所述监视装置中的各个监视器收发器进行无线通信来基于电池信息执行预定处理,其中
10.在所述监视装置的启动时间,每个所述监视器收发器在周期性通告(advertising)事件中执行通告操作,以建立所述监视装置与所述控制装置之间的无线通信连接,并且所述控制装置执行扫描操作,和
11.两个或更多个所述监视装置的每个监视器收发器具有事件管理单元,所述事件管理单元管理所述通告事件的生成周期,以便在各自不同的时刻执行通告操作。
12.在以上公开的电池管理系统之一中,所述具有事件管理单元的监视装置布置在以所述控制装置为中心的虚拟圆的圆周上的不同位置处。在以上公开的电池管理系统中的另一电池管理系统中,所述具有事件管理单元的监视装置包括第一监视装置和第二监视装置,并且所述控制装置布置在第一监视装置和第二监视装置的中点处。在以上公开的电池管理系统中的又一电池管理系统中,所述具有事件管理单元的监视装置包括第三监视装置和第四监视装置,并且第三监视装置和第四监视装置相对于穿过所述控制装置的虚拟线被线对称地布置。
13.根据所公开的电池管理系统,所述监视装置的收发器各自分别具有对所述通告事
件的生成周期进行管理的事件管理单元。具有所述事件管理单元的所述收发器能够通过所述事件管理单元管理事件生成周期以在不同的时刻执行通告操作。结果,能够在启动时抑制无线电波干扰。
14.本说明书中所公开的方面采用了彼此不同的技术方案以便实现各自的目的。在权利要求和本部分中描述的括号中的附图标记示例性地示出了与稍后描述的实施例的零件/配置的对应关系,并且不旨在限制技术范围。通过参考下面的详细描述和附图,说明书中公开的目的、特征和优点将变得明显。
附图说明
15.本公开的目的、特征和优点将从以下参照附图进行的详细描述中变得更加明显,在附图中:
16.图1是显示装配有电池组的车辆的图;
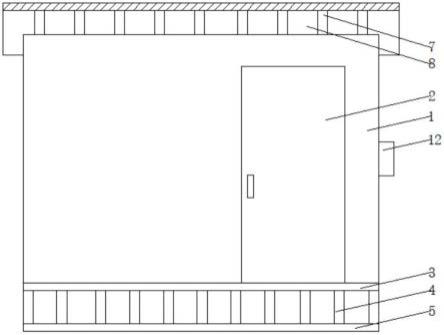
17.图2是显示包括根据第一实施例的电池管理系统的电池组的示意性结构的平面图;
18.图3是显示监视装置和控制装置之间的位置关系的图;
19.图4是显示电池管理系统的结构的框图;
20.图5是显示监视装置和控制装置之间的通信时序的示例的图;
21.图6是显示直到连接建立的通信时序的示例的图;
22.图7是显示通告处理的流程图;
23.图8是显示通告事件的生成周期的图;
24.图9是显示参考例中两个监视装置的通告操作的时间的图;
25.图10是显示第一实施例中两个监视装置的通告操作的时间的图;
26.图11是显示由根据第二实施例的电池管理系统中的事件管理单元执行的处理的流程图;
27.图12是显示两个监视装置的通告操作的时间的图;
28.图13是解释重新连接的图;
29.图14是显示由根据第三实施例的电池管理系统中的事件管理单元执行的处理的流程图;
30.图15是显示通告事件的生成周期的另一图;
31.图16是显示由监视装置执行的通告处理的流程图;
32.图17是显示由控制装置执行的扫描处理的流程图;
33.图18是显示电池管理系统的结构的另一示例的框图;和
34.图19是显示监视装置与控制装置之间的位置关系的另一示例的图。
具体实施方式
35.在下文中,将参照附图描述多个实施例。在每个实施例中,相同的附图标记被分配给对应的元件,因此可以省略重复的描述。在每个实施例中,当仅描述了部分配置时,该配置的其余部分可以采用其他实施例的对应部分。此外,不仅在各个实施例的描述中明确示出配置的组合,而且多个实施例的配置即使在它们没有明确示出的情况下也可以部分地组
合,只要这种组合不是特别地存在困难即可。
36.(第一实施例)
37.首先,基于图1,对装配有根据本实施例的电池管理系统的车辆、特别是关于设置有该电池管理系统的电池组的结构进行描述。图1是显示车辆的示意性结构的图。该车辆是以电为动力的车辆,例如电动车辆或混合动力车辆。
38.《车辆》
39.如图1所示,车辆10包括电池组(bat)11、电力控制单元12、电动发电机13和ecu 14。pcu是power control unit(电力控制单元)的缩写。mg是motor generator(电动发电机)的缩写。ecu是electronic control unit(电子控制单元)的缩写。
40.电池组11包括后面将描述的组装式电池(assembled battery)20,并且提供能够被充电和放电的直流电压源。电池组11向车辆10的电负载供电。电池组11通过电力控制单元(pcu)12向电动发电机(mg)13供电。电池组11通过电力控制单元12充电。电池组11有时被称为作为主电池。
41.电池组11位于车辆10的前舱(front compartment)中,例如,如图1所示。电池组11也可以位于后舱(rear compartment)中、座椅下方、地板下方等处。例如,在混合动力车辆的情况下,发动机所在的舱室有时可以称为发动机舱或发动机室。
42.电力控制单元12根据来自ecu 14的控制信号在电池组11与电动发电机13之间执行双向电力转换。电力控制单元12有时可以被称为电力转换器(power converter)。电力控制单元12包括例如逆变器(inverter)。逆变器将直流电压转换成交流电压,例如三相交流电压,并将交流电压输出到电动发电机13。逆变器将电动发电机13产生的电力转换成直流电压并将该直流电压输出到转换器。电力控制单元12可以包括转换器。转换器布置在电池组11与逆变器之间的通电路径中。转换器具有升高和降低直流电压的功能。
43.电动发电机13是交流旋转电机,例如,永磁体嵌入转子中的三相交流同步电动机。电动发电机13用作车辆10的行驶动力源,即电动机。电动发电机13由电力控制单元12驱动以产生旋转驱动力。由电动发电机13产生的驱动力被传递到驱动轮。电动发电机13在车辆10被制动时用作发电机,并且执行再生发电。电动发电机13产生的电力通过电力控制单元12供给到电池组11并存储在电池组11中的组装式电池20中。
44.ecu 14配置为包括计算机,所述计算机包括处理器、存储器、输入/输出接口、连接它们的总线等。处理器是用于算术处理的硬件。处理器包括例如作为核心的cpu。cpu是central processing unit(中央处理器)的缩写。存储器是一种非暂时性的、实体性的存储介质,它非临时地存储或记忆能被计算机读取的程序和数据。存储器存储由处理器执行的各种程序。
45.ecu 14例如从电池组11获取关于组装式电池20的信息,并且控制电力控制单元12以控制电动发电机13的驱动和电池组11的充电/放电。ecu 14可以从电池组11获取诸如组装式电池20的电压、温度、电流、荷电状态(state of charge,简称soc)和soh(state of health,简称健康状态)的信息。ecu 14可以获取组装式电池20的电池信息,例如电压、温度和电流,以计算soc和soh。soc是state of charge(荷电状态)的缩写。soh是state of health(健康状态)的缩写。
46.ecu 14的处理器执行被包含在例如存储在存储器中的pcu控制程序中的多个指
令。结果,ecu 14构建了用于控制电力控制单元12的多个功能单元。在ecu 14中,通过使处理器在存储于存储器中的程序的控制下执行多个指令来构造/提供多个功能单元。ecu 14可以被称为ev ecu。
47.《电池组》
48.接下来,参照图2描述电池组11的配置示例。图2是显示电池组11的内部结构的平面图。在图2中,壳体由双点划线表示。
49.如图2所示,电池组11包括组装式电池20、多个监视装置30、控制装置40和壳体50。
50.壳体50容纳构成电池组11的其他元件,即组装式电池20、监视装置30和控制装置40。壳体50可以使用金属材料或树脂材料形成。壳体50可以具有金属部分和树脂部分。壳体50具有大致长方体形状。在图2中,壳体50在车辆10上的安装表面的纵向方向表示为x方向,其横向方向表示为y方向。此外,垂直于安装表面的竖直方向表示为z方向。x方向、y方向和z方向处于相互正交的位置关系。在下文中,只要没有特别说明,将从z方向在平面中观察到的形状、即沿着由x方向和y方向定义的沿xy平面的形状称为平面形状。此外,从z方向观察到的平面图简称为平面图。
51.在本实施例中,车辆10的左右方向对应x方向,前后方向对应y方向,并且上下方向对应z方向。从电池堆21朝向监视装置30的方向为向上方向,且从监视装置30朝向电池堆21的方向为向下方向。壳体50在车辆10上的安装表面是相对于电池堆21向下的表面。图2的布置可以仅是示例,并且电池组11可以布置在相对于车辆10的任何方向上。
52.组装式电池20具有在x方向上并排布置的多个电池堆21。电池堆21也可以称为电池块或电池模块。组装式电池20通过将多个电池堆21串联连接而构成。每个电池堆21具有多个电池元22。电池堆21具有串联连接的多个电池元22。本实施例的电池堆21是通过将在y方向并排布置的多个电池元22串联连接而构成。组装式电池20提供上述直流电压源。组装式电池20、电池堆21和电池元22对应于电池。
53.电池元22是通过化学反应产生电动势的二次电池(secondary battery)。作为二次电池,例如可以采用锂离子二次电池或镍氢二次电池。锂离子二次电池是使用锂作为电荷载体的二次电池。除了电解质为液体的一般锂离子二次电池之外,还可以包括使用固体电解质的所谓全固态电池。
54.在每个电池堆21的上表面上,线性母线(linear bus bar)单元23布置在x方向上的两端。即,一对母线单元23布置在每个电池堆21中。母线单元23电连接多个电池元22。每个电池元22形成为扁平形状,并且被层压/层叠以使得侧面在y方向上相互重叠。电池元22在x方向的两端具有在z方向(更具体地,在向上方向)上突出的正极端子和负极端子(未图示)。电池元22层叠以使得正极端子和负极端子在y方向上交替布置。
55.每个母线单元23具有多个母线和母线盖(未示出)。母线是由具有良好导电性的金属例如铜制成的板状构件。母线在y方向电连接相邻的电池元22的正极端子和负极端子。结果,在每个电池堆21中,多个电池元22串联电连接。注意,在每个电池堆21中,电池元22的布置在y方向的一端上的正极端子连接到预定的正极布线,并且电池元22的布置在y方向的另一端上的负极端子连接到预定的负极布线。
56.母线盖通过使用电绝缘材料例如树脂形成。母线盖沿y方向从电池堆21的一端到另一端线性地设置以覆盖多个母线。
57.为多个电池堆21中的每个设置监视装置30。如图2所示,监视装置30布置在每个电池堆21的一对母线单元23之间。监视装置30利用螺钉或类似件固定到母线单元23。监视装置30具有电路板(未图示),并且固定成使得电路板的厚度方向与z方向大致一致。如后面将描述的,监视装置30配置为能够与控制装置40进行无线通信。监视装置30中所包括的天线37(后面将描述)布置成在z方向不与母线单元23重叠,即,在z方向从母线单元23向上突出。
58.控制装置40布置在x方向上电池堆21之间的位置处。控制装置40具有电路板(未图示),并且电路板的厚度方向布置成与x方向大致一致。控制装置40例如可以固定在电池堆21的侧面,或者可以固定在壳体50的下表面。控制装置40配置为能够与监视装置30中的每一个进行无线通信。控制装置40中所包括的天线42(后面将描述)布置成在z方向上与监视装置30的天线37大致相同的高度。即,控制装置40中所包括的天线42以在z方向从母线单元23突出的方式设置。
59.在电池组11中,监视装置30和控制装置40提供电池管理系统60。即,电池组11配备有电池管理系统60。
60.《监视装置与控制装置之间的位置关系》
61.接着,参照图2和图3,对容纳在壳体50中的多个监视装置30与控制装置40之间的位置关系进行说明。图3是显示图2所示的电池组11中的多个监视装置30与控制装置40之间的位置关系的图。在图3中,监视装置30显示为sbm,控制装置40显示为ecu。sbm是satellite battery module(卫星电池模块)的缩写。在图3中,在平面图中,以控制装置40为中心的虚拟圆由单点划线显示。在平面图中,穿过控制装置40的虚拟直线il由双点划线显示。
62.如图2和图3所示,电池组11包括多个监视装置30和一个控制装置40。多个监视装置30包括监视装置30a、监视装置30b、监视装置30c、监视装置30d、监视装置30e、监视装置30f、监视装置30g和监视装置30h。多个监视装置30在x方向上以监视装置30g、监视装置30e、监视装置30c、监视装置30a、监视装置30b、监视装置30d、监视装置30f和监视装置30h的顺序并排布置。
63.在平面图中,所述多个监视装置30中的两个或更多个布置在以控制装置40为中心的虚拟圆的圆周上的不同位置处。该圆是完整的圆/真圆。例如,在一个圆周上布置的监视装置30的数量可以是两个,或者可以是三个或更多。所有监视装置30可以布置在单个圆的圆周上。
64.在本实施例中,两个监视装置30布置在一个圆周上(即,在一个虚拟圆上)。这些虚拟圆是同心圆,并且在每个虚拟圆的圆周上布置两个监视装置30。一个监视装置30不是布置在多个圆的圆周上,而是布置在一个圆的圆周上。具体地,监视装置30a和30b布置在第一圆的圆周上,第一圆是最靠近控制装置40的圆。监视装置30c和30d布置在第二圆的圆周上,第二圆是在第一圆的外侧且与第一圆相邻的圆。监视装置30e和30f布置在第三圆的圆周上,第三圆是在第二圆的外侧的圆。监视装置30g和30h布置在第四圆的圆周上,第四圆是在第三圆的外侧的圆。布置在同一圆上的两个监视装置30具有以控制装置40为中心的双重对称性。
65.此外,在平面图中,两个监视装置30相对于穿过控制装置40的虚拟直线il线对称布置。线对称布置不仅可以包括两个监视装置30相对于直线il完全线对称布置,还可以包括两个监视装置30大致线对称布置。线对称布置的两个监视装置30中的一个对应于第一监
视装置,而另一个对应于第二监视装置。直线il在与两个监视装置30的排列方向(alignment direction)正交的方向延伸。具体而言,直线il在y方向延伸。监视装置30a和监视装置30b相对于直线il线对称地布置。监视装置30c和监视装置30d相对于直线il线对称地布置。监视装置30e和监视装置30f相对于直线il线对称地布置。监视装置30g和监视装置30h相对于直线il线对称地布置。监视装置30a、30c、30e、30g与监视装置30b、30d、30f、30h相对于直线il线对称地布置。即,全部监视装置30相对于直线il对称地布置。
66.此外,在平面图中,控制装置40布置在两个监视装置30的中点处。中点不仅可以定义为控制装置40与每个监视装置30之间的距离精确地相等的状态,也可以定义为所述距离几乎相等的状态。两个监视装置30中的一个对应于第三监视装置,另一个对应于第四监视装置。具体而言,控制装置40大致布置在多个监视装置30的x方向的中央。控制装置40布置在x方向上监视装置30a与监视装置30b之间的位置处。控制装置40布置在x方向上监视装置30a和30b的中点处。类似地,控制装置40布置在x方向上监视装置30c和30d的中点处。控制装置40布置在x方向上监视装置30e和30f的中点处。控制装置40布置在x方向上监视装置30g和30h的中点处。
67.《电池管理系统》
68.接着,参照图4说明电池管理系统的示意结构。图4是显示电池管理系统的配置的框图。
69.如图4所示,电池管理系统60包括控制装置(ecu)40和多个管理装置(sbm)30。控制装置40可以被称为电池ecu或bmu。bmu是battery management unit(电池管理单元)的缩写。电池管理系统60是通过使用无线通信来管理电池的系统。在电池管理系统60中,在一个控制装置40与多个监视装置30之间进行无线通信。
70.《监视装置》
71.首先,描述监视装置30。由于监视装置30的配置与所有装置30几乎相同,所以下面描述共同的配置。监视装置30包括供电电路(psc)31、多路复用器(mux)32、监视ic(mic)33、微型计算机(mc)34、无线ic(wic)35、前端电路(fe)36和天线(ant)37。监视装置30中的那些元件之间的通信通过缆线进行。
72.供电电路31使用从电池堆21供给的电压来产生用于使监视装置30中所包括的其他电路元件运行的运行电力。在本实施例中,供电电路31包括供电电路311、312、313。供电电路311使用从电池堆21供给的电压产生预定电压,并将其供给到监视ic 33。供电电路312使用由供电电路311产生的电压产生预定电压,并将其供给到微计算机34。供电电路313使用由供电电路311产生的电压产生预定电压,并将其供给到无线ic 35。
73.多路复用器32是输入所述电池组11中包含的多个传感器70的检测信号并将它们作为一个信号输出的选择电路。多路复用器32根据来自监视ic 33的选择信号选择(即切换)输入并将其作为一个信号输出。传感器70包括检测每个电池元2的物理量的传感器、用于确定/识别当前涉及多个电池元22中的哪一个电池元的传感器等。物理量检测传感器包括例如电压传感器、温度传感器、电流传感器等。
74.监视ic 33通过多路复用器(multiplexer)32感测(即,获取)电池信息,例如电池元电压、电池元温度和电池元确定,并将电池信息发送到微型计算机34。监视ic 33有时可被称为电池元监视电路(csc)。csc是cell supervising circuit(电池元监管电路)的缩
写。监视ic 33可以具有以下功能:(i)对监视装置30(包括ic 33本身)的电路部分进行故障诊断,和(ii)将诊断结果与电池信息一起作为监视数据进行发送。当监视ic 33接收到请求获取从微型计算机34发送的电池信息的数据时,监视ic 33通过多路复用器32感测(即,拾取)电池信息,并将包括至少电池信息的监视数据发送到微型计算机34。监视ic 33对应于监视单元。
75.微型计算机34是设有作为处理器的cpu、作为存储器的rom和ram、输入/输出接口、以及用于连接它们的总线的微型计算机。cpu通过在使用ram的临时存储功能的同时执行被存储在rom中的各种程序来构成多个功能单元。rom是read only memory(只读存储器)的缩写。ram是random access memory(随机存取存储器)的缩写。
76.微型计算机34通过监视ic 33控制感测和自诊断的时间表(schedule,或称为进程)。微型计算机34接收从监视ic 33发送的监视数据并将其发送到无线ic 35。微型计算机34将请求获取电池信息的数据发送到监视ic 33。作为示例,当本实施例的微型计算机34接收到从无线ic 35发送的请求获取电池信息的数据时,微型计算机34将请求获取电池信息的数据发送到监视ic 33。
77.无线ic 35包括rf电路(rf)350和微型计算机(mc)351,用于无线地发送和接收数据。无线ic 35具有对发送数据进行调制并以rf信号的频率进行振荡的发送功能。无线ic 35具有用于解调所接收到的数据的接收功能。rf是radio frequency(射频)的缩写。
78.无线ic 35对从微型计算机34发送的包含电池信息的数据进行调制,并且经由前端电路36和天线37将其发送到控制装置40。无线ic35将用于无线通信所需的诸如通信控制信息的数据添加到包括电池信息的发送数据,并且发送该数据。无线通信所需的数据包括例如识别符(id,也称标识符)和错误检测码。无线ic 35控制sbm 30与控制装置40之间的通信的数据大小、通信格式、时间表(进程)、错误检测等。
79.无线ic 35经由天线37和前端电路36接收从控制装置40发送的数据,并且解调该数据。当无线ic 35接收到例如包括电池信息获取和发送请求的数据时,无线ic 35通过监视ic 33获取包含电池信息的监视数据,并作为该请求的响应将监视数据发送到控制装置40。无线ic 35对应于无线电路单元。
80.无线ic 35具有事件管理单元(em)352。事件管理单元352为无线ic 35管理通告事件(advertising event)的生成周期以执行通告操作。例如,事件管理单元352是例如由cpu构建的在使用无线ic 35中包括的微型计算机351中的ram的临时存储功能的同时执行被存储在rom中的各种程序的功能单元之一。稍后描述通告操作和事件管理。
81.前端电路36具有用于无线ic 35与天线37之间的阻抗匹配的匹配电路,以及用于去除不必要的频率分量的滤波电路。
82.天线37把作为电信号的rf信号转换为无线电波并将其发射到空间中。天线37接收在空间中传播的无线电波并将它们转换为电信号。
83.《控制装置》
84.接着,参照图4对控制装置40进行说明。控制装置40包括供电电路(psc)41、天线(ant)42、前端电路(fe)43、无线ic(wic)44、主微型计算机(mmc)45和副微型计算机(sub-microcomputer,简称smc)46。控制装置40中的这些元件中的每一个之间的通信通过线缆进行。
85.供电电路41使用从电池(bat)15供给的电压来产生用于运行被包括在控制装置40中的其他电路元件的运行电力。电池15是安装在车辆10上的dc(直流)电压源并且不同于电池组11。电池15有时被称为辅助电池,因为它向车辆10的辅助设备提供电力。在本实施例中,供电电路41包括供电电路411和412。供电电路411使用从电池15供给的电压产生预定电压,并将该电压供给到主微型计算机45和副微型计算机46。为了简化附图,供电电路411与副微型计算机46之间的电连接被省略了。供电电路412使用由供电电路411产生的电压来产生预定电压,并将其供给到无线ic 44。
86.天线42将作为电信号的rf信号转换为无线电波并将其发射到空间中。天线42接收在空间中传播的无线电波并将它们转换为电信号。
87.前端电路43包括用于在无线ic 44与天线42之间的阻抗匹配的匹配电路,以及用于去除不必要的频率分量的滤波电路。
88.无线ic 44具有用于无线发送和接收数据的rf电路和微型计算机。与无线ic 35类似,无线ic 44具有发送功能和接收功能。无线ic 44经由天线42和前端电路43接收从监视装置30发送的数据,并对该数据进行解调。然后,包含电池信息的监视数据被发送到主微型计算机45。无线ic 44接收从主微型计算机45发送的数据,对其进行调制,并经由前端电路43和天线42将其发送到监视装置30。无线ic 44将无线通信所需的数据(诸如通信控制信息)添加到发送数据并发送该数据。无线通信所要求的数据包括例如识别符(id)和错误检测码。无线ic 44控制监视装置30和控制装置40之间的通信的数据大小、通信格式、时间表、错误检测等。
89.主微型计算机45是设置有cpu、rom、ram、输入/输出接口、连接它们的总线等的微型计算机。rom存储由cpu执行的各种程序。主微型计算机45生成请求监视装置30对包含电池信息的监视数据进行处理的命令,并将包含该命令的发送数据发送到无线ic 44。本实施例的主微型计算机45生成对包含电池信息的监视数据的获取和发送进行请求的命令。该请求在本文中也可以称为指令。
90.主微型计算机45接收从无线ic 44发送的包含电池信息的监视数据,并基于该监视数据执行预定处理。例如,主微型计算机45执行将获取的电池信息发送到ecu 14的处理。主微型计算机45可以基于电池信息计算soc和/或soh,并且可以将包括计算出的soc和/或soh的电池信息发送到ecu 14。主微型计算机45可以基于电池信息执行用于均衡每个电池元22的电压的均衡处理。主微型计算机45可以获取车辆10的ig信号,并根据车辆10的行驶状态执行上述处理。主微型计算机45可以基于电池信息执行检测电池元22中的异常的处理,或者可以将异常检测信息发送到ecu 14。
91.副微型计算机46是设置有cpu、rom、ram、输入/输出接口、连接它们的总线等的微型计算机。rom存储由cpu执行的各种程序。
92.副微型计算机46执行用于监视控制装置40中的部件/数据的监视处理。例如,副微型计算机46可以监视在无线ic 44与主微型计算机45之间交换的数据。副微型计算机46可以监视主微型计算机45的状态。
93.副微型计算机46可以监视无线ic 44的状态。
94.《无线通信》
95.接着,参照图5说明监视装置30与控制装置40之间的无线通信。图5是显示监视装
置30与控制装置40之间的通信时序的示例的图。图5描述了监视装置30之一与控制装置40之间的无线通信。在图5中,监视ic 33表示为mic33,无线ic35表示为wic35,控制装置40表示为ecu 40。
96.如图5所示,监视装置30的无线ic 35与控制装置40进行无线通信连接建立处理(步骤s10)。稍后描述连接建立处理。
97.当建立连接时,无线ic 35和控制装置40然后执行配对处理(步骤s20)。具体而言,为了加密通信,进行特有信息的交换,即配对。当配对信息保持在无线ic 35与控制装置40之间时,即处于结合状态时,配对处理结束。
98.当配对处理完成时,无线电路单元35和控制装置40进行数据通信。如图5所示,控制装置40向监视装置30发送请求数据(步骤s30),即发送包括对包含电池信息的监视数据进行的获取请求和发送请求的发送数据。
99.当监视装置30的无线ic 35接收到请求数据时,无线ic 35向监视ic 33发送用于获取包含电池信息的监视数据的获取请求(步骤s31)。在本实施例中,无线ic 35经由微型计算机34向监视ic 33发送获取请求。
100.在接收到获取请求时,监视ic 33执行感测(步骤s32)。监视ic33通过多路复用器32执行感测并获取每个电池元22的电池信息。另外,监视ic 33执行电路故障诊断。
101.接下来,监视ic 33将包含电池信息的监视数据发送到无线ic 35(步骤s33)。在本实施例中,将包含故障诊断结果的监视数据与电池信息一起发送。监视ic 33经由微型计算机34向无线ic 35发送数据。
102.当无线ic 35接收到由监视ic 33获取的监视数据时,无线ic 35将包括监视数据的发送数据,即响应数据,发送到控制装置40(步骤s34)。
103.当控制装置40接收到响应数据时,控制装置40基于监视数据执行预定处理(步骤s35)。注意,执行请求处理的控制装置40可以称为主装置(master),并且执行响应处理的监视装置30可以称为从装置(slave)。
104.上述步骤s10至s35的处理在监视装置30中的每一个与控制装置40之间进行。例如,电池管理系统60首先执行步骤s10和s20的处理。在执行了步骤s10和s20的处理之后,周期性地执行数据通信处理,即步骤s30到s35的处理。
105.《连接建立处理》
106.接着,参照图6说明上述步骤s10的处理,即连接建立处理。图6是显示直到连接建立的通信时序的示例的图。图6对应于图5。
107.监视装置30中的每一个和控制装置40在启动(start-up)时间执行步骤s10和s20的处理。启动是指,例如,供给运行电力时的时间。在从电池堆21和电池15持续供给运行电力的配置中,在车辆10的制造过程之后或在修理店更换部件之后启动车辆。启动也可以是供给启动信号例如ig信号的时间。例如,当ig信号通过用户操作而从关闭切换到开启时,即为启动。在启动时,在控制装置40与和控制装置40建立无线通信的所有监视装置30之间执行步骤s10和s20的处理。
108.如图6所示,首先,控制装置40执行扫描操作(步骤s11),无线ic 35执行通告操作(步骤s12)。扫描操作的开始可以早于通告操作的开始,或者可以大致在相同的时间。或者,扫描操作的开始可以晚于通告操作的开始。执行扫描操作的控制装置40有时可以称为中央
或扫描仪。执行通告操作的无线ic 35有时可以被称为外围设备或通告器。
109.无线ic 35执行通告操作以便将它的存在传达给控制装置40。无线ic 35的事件管理单元352周期性地生成通告事件。无线ic 35针对每个通告事件发送通告包(adv_pkt)。即,无线ic 35周期性地执行通告操作。通告包包括其自身的id信息和ecu 14等。在启动时,多个监视装置30的无线ic 35将通告包发送到控制装置40。通告包有时可以称为通告帧、通告数据等。
110.当控制装置40通过扫描操作检测到一个通告包,即一个无线ic35时,控制装置40将连接请求(connect_rq)发送到所检测的无线ic 35(步骤s13)。
111.然后,当无线ic 35接收到连接请求时,在一个监视装置30与控制装置40之间建立连接(步骤s14)。已建立连接的监视装置30的无线ic 35停止通告包的发送。控制装置40继续扫描操作,直到与所有监视装置30的无线ic 35建立连接。监视装置30周期性地执行通告操作,直到与控制装置40建立连接。
112.《通告事件(advertising event)》
113.接下来,参考图7和图8说明通告事件。图7是示出由无线ic 35的事件管理单元352执行的事件管理处理的一个示例的流程图。事件管理单元352在连接建立处理(步骤s10)时执行以下处理。
114.如图7所示,无线ic 35的事件管理单元352生成通告事件(步骤s100)。事件管理单元352参考无线ic 35的启动且在无线ic 35启动之后生成第一通告事件。在本实施例中,对于多个无线ic 35,第一通告事件的生成时间基本相同。无线ic 35响应于通告事件发送通告包。
115.接着,事件管理单元352随机地设定周期(步骤s110)。也就是说,事件管理单元352将随机的持续时间设定为通告事件的“周期”。事件管理单元352使用由无线ic 35保持的特有值,例如识别网络接口的id或地址,通过诸如生成多项式(generator polynomial)的特定函数来计算和设定周期。无线ic 35使用来自监视装置30的除无线ic35外的元件的输入信息,例如,由监视ic 33获取的监视信息和来自微型计算机34的命令(指令),而不是使用上述特有值,通过诸如生成多项式的特定函数计算和设定周期。即,事件管理单元352使用对包括相关事件管理单元352的监视装置30特有的值,通过诸如生成多项式的特定函数来计算和设定周期。
116.以这种方式,事件管理单元352通过使用诸如生成多项式的特定函数的运算来随机地设定周期。即,把随机数设定为周期。在本实施例中,作为示例,通过(i)使用特定函数计算延迟量,和(ii)把这样的延迟加到预定周期上,来随机地设定周期。预定周期是多个监视装置30共同的值。
117.接着,事件管理单元352确定是否已经从控制装置40接收到连接请求(步骤s120)。当事件管理单元352在步骤s110中设定的周期内接收到连接请求时,事件管理单元352停止通告事件的生成(步骤s130),并结束一系列处理。
118.另一方面,如果在步骤s110中设定的周期内没有接收到任何连接请求,则当在步骤s110中设定的周期过去时,事件管理单元352重新执行步骤s100之后的处理。也就是说,当在步骤s110中设定的周期过去时,事件管理单元352新生成通告事件。
119.在上述事件管理处理中,步骤s120和s130的处理可以作为通告操作的继续确定和
停止处理共同的处理由无线ic 35执行。周期设定处理可以在通告事件的生成处理之前执行,或者两个处理可以并行执行。
120.图8是显示通告事件的生成周期的图。在图8中,通告事件显示为evt,通告事件的生成周期显示为t。上述预定周期显示为int,延迟量显示为dly。
121.如上所述,预定周期int是多个监视装置30共用的值。延迟量dly是通过事件管理单元352使用特定函数计算出的随机值,即随机数。以这样的方式,事件管理单元352随机地设定通告事件的生成周期t。在图8的示例中,第一周期t1和第二周期t2不同,因为在各个位置的延迟量dly不同。
122.《第一实施例的概要》
123.图9是显示参考例中的两个监视装置30的通告操作的时间的图。图10是显示根据本实施例的电池管理系统60中的两个监视装置30的通告操作的时间的图。在图9和图10中,监视装置30a和30b图被显示为两个监视装置30。监视装置30a称为sbm 30a,监视装置30b称为sbm 30b。
124.参考例的监视装置30a和30b的无线ic 35不具有上述事件管理单元352。在每个无线ic 35中,启动之后的第一通告事件的生成时间彼此基本相同。每个无线ic 35以共同的周期生成通告事件。因此,如图9所示,监视装置30a和30b的通告操作的时间周期地(重复地)重叠。因此,如果监视装置30a和30b在启动时发送通告包,则可能发生无线电波干扰。
125.在本实施例中,监视装置30a和30b的无线ic 35各自具有事件管理单元352。事件管理单元352随机地设定通告事件的生成周期。因此,如图10所示,可能防止监视装置30a和30b的通告操作的时间周期地/重复地重叠。因此,即使监视装置30a和30b在启动时发送通告包,与参考例相比,也不太可能发生无线电波干扰。
126.如上所述,根据本实施例的电池管理系统60,事件管理单元352管理通告事件的生成周期使得在彼此不同的时间执行通告操作。具体而言,事件管理单元352使用具有事件管理单元352的监视装置30所特有的值,通过诸如生成多项式的特定函数随机地设定通告事件的生成周期。因此,即使多个监视装置30在启动时执行通告操作,也能够抑制无线电波干扰的发生。在本实施例中,由于通告事件的周期每次随机地改变,因此能够提高避免外部噪音等的可能性。特别地,能够提高避免周期性噪声的可能性。即,能够可靠地建立连接。
127.构成电池管理系统60的控制装置40和多个监视装置30容纳在电池组11的壳体50中。控制装置40和多个监视装置30布置在封闭空间(即,有限的狭窄/小的空间)中。在封闭空间中,执行一个控制装置40与多个监视装置30之间的无线通信,即一对多无线通信。在本实施例中,多个监视装置30中的每一个具有事件管理单元352。在多个监视装置30中,事件管理单元352随机地设定通告事件的生成周期。因此,即使多个监视装置30在启动时执行通告操作,也能够抑制无线电波干扰的发生。尽管在图10中图示了两个监视装置30a和30b,通告事件的生成时间(即,通告操作的时间)可以类似地在其他装置30之间,即在装置30a到装置30h之间移动(变化)。
128.在本实施例中,例如,两个监视装置30a和30b布置在以控制装置40为中心的虚拟圆的圆周上。以这样的方式布置的监视装置30a和30b在平面图中具有关于控制装置40大致相同的距离。但是,每一个监视装置30a和30b具有事件管理单元352。因此,即使每一个监视装置30a和30b在启动时执行通告操作,也能够抑制无线电波干扰的发生。
129.在本实施例中,以控制装置40为中心的虚拟圆为同心圆,并且两个监视装置30布置在同心圆的每一个上。监视装置30a和30b布置在第一圆的圆周上。监视装置30c和30d布置在第二圆的圆周上。监视装置30e和30f布置在第三圆的圆周上。监视装置30g和30h布置在第四圆的圆周上。因此,即使布置在同一圆周上的监视装置30中的每一个在启动时执行通告操作,也能够抑制无线电波干扰的发生。
130.在一个圆的圆周上布置的监视装置30的数量不限于两个。在一个圆的圆周上也可以布置三个或更多个监视装置30。在同心圆中,示出了布置在每个圆的圆周上的监视装置30的数量彼此相等的示例,但是本公开不限于这样的配置。例如,监视装置30的数量可以在第一圆和第二圆之间不同。在本实施例中,同心圆的示例显示为虚拟圆,但是本公开不限于这样的配置。可以使用仅仅一个圆。
131.在本实施例中,例如,两个监视装置30a和30b相对于通过控制装置40的虚拟直线il线对称地布置。以这样的方式布置的监视装置30a和30b在平面图中具有关于控制装置40大致相同的距离。但是,每一个监视装置30a和30b具有事件管理单元352。因此,即使每一个监视装置30a和30b在启动时执行通告操作,也能够抑制无线电波干扰的发生。这也同样适用于监视装置30c和监视装置30d之间的位置关系、监视装置30e和监视装置30f之间的位置关系、以及监视装置30g与监视装置30h之间的位置关系。
132.在本实施例中,控制装置40布置在例如两个监视装置30a和30b的中点。以这种方式布置的监视装置30a和30b在平面图中具有关于控制装置40的基本相同的距离。但是,每一个监视装置30a和30b具有事件管理单元352。因此,即使每一个监视装置30a和30b在启动时执行通告操作,也能够抑制无线电波干扰的发生。这也同样适用于监视装置30c和监视装置30d之间的位置关系、监视装置30e和监视装置30f之间的位置关系、监视装置30g和监视装置30h之间的位置关系。
133.在本实施例中,事件管理单元352将作为基于id计算的随机值的延迟量dly添加到作为每个无线ic 35的共同值的预定周期int,以设定通告事件的随机生成周期。但是,随机地设定通告事件的生成周期的方法不限于上述示例。例如,通告事件的生成周期可以仅通过上述延迟量dly随机地设定。
134.(第二实施例)
135.第二实施例是用作基本配置的前述实施例的修改,并且可以结合前述实施例的描述。在前述实施例中,通告事件的生成周期由随机数设定。代替上述,启动后的第一通告事件的时间可以变化。
136.图11是根据本实施例的电池管理系统60中连接建立处理期间由事件管理单元352执行的处理的流程图。
137.如图11所示,无线ic 35的事件管理单元352设定直到生成第一通告事件的等待时间和通告事件的周期(步骤s200)。等待时间是从基于具有事件管理单元352的无线ic 35的启动时间的参考时间(reference timing)到第一通告事件的生成时间的时间。对于每个无线ic 35,等待时间预先设定为彼此不同的值。周期是固定值(恒定值),即,不是如前述实施例中的可变值。参考时间可以是启动时间,或者可以是添加了预定值(即,固定值)的启动时间。预定值是多个无线ic 35共同的值。事件管理单元352读取和设定预先存储在存储器中的等待时间和周期。
138.接着,事件管理单元352根据在步骤s200中设定的等待时间和周期生成通告事件(步骤s210)。事件管理单元352在从参考时间起经过预定的等待时间后,生成启动后的第一通告事件。事件管理单元352以上述预定周期生成第二和随后的通告事件。无线ic 35响应于通告事件发送通告包。
139.接着,事件管理单元352确定是否已经从控制装置40已经接收到连接请求(步骤s220)。当事件管理单元352在步骤s200中设定的周期内接收到连接请求时,事件管理单元352停止通告事件的生成(步骤s230)并结束一系列处理。
140.另一方面,如果在步骤s200中设定的周期内没有接收到连接请求,则事件管理单元352在步骤s200中设定的周期过去时重新执行步骤s210的处理。也就是说,当在步骤s200中设定的周期过去时,事件管理单元352新生成通告事件。
141.在上述事件管理处理中,步骤s220和s230的处理可以是与由无线ic 35的通告操作的继续确定和停止处理共同的处理。在电池管理系统60中,除了由事件管理单元352执行的处理之外的配置与前述实施例中描述的配置相同。例如,控制装置40与多个监视装置30之间的位置关系也同样。
142.《第二实施例的概要》
143.图12是显示本实施例的电池管理系统60中的两个监视装置30的通告操作的时间的图。在图12中,监视装置30a和30b图示为两个监视装置30。此外,监视装置30a称为sbm 30a,监视装置30b称为sbm 30b。在图12中,参考时间用st表示,从参考时间st到启动后的第一通告事件的生成时间的等待时间用wt表示。通告事件的生成周期,即通告操作的周期,由t0表示。
144.监视装置30a的无线ic 35的启动时间和监视装置30b的无线ic35的启动时间如上所述大致相同。因此,参考时间st也彼此大致相同。监视装置30a的等待时间wt1与监视装置30b的等待时间wt2彼此不同。由于等待时间wt1和wt2之间的差异,启动后的第一通告事件的生成时间在两个装置30a和30b之间具有偏差。周期t0是固定值(即,恒定值),并且是监视装置30a和30b共同的值。每个无线ic 35生成共同周期t0中的通告事件。由于等待时间wt1和wt2之间的差异,第二和后续通告事件的生成时间不同(即,在两个装置之间变化)。因此,能够防止监视装置30a和30b的通告操作的时间周期地重叠。即使监视装置30a和30b在启动时发送通告包,也不可能发生无线电波干扰。
145.如上所述,根据本实施例的电池管理系统60,事件管理单元352管理通告事件的生成周期,使得在彼此不同的时间执行通告操作。具体地,通告事件的生成周期被设定为使得第一通告事件的生成时间基于(即,参照)每个无线ic 35的启动而彼此不同。因此,即使多个监视装置30在启动时执行通告操作,也能够抑制无线电波干扰的发生。在本实施例中,由于周期本身是固定的,因此控制装置40容易把握需要多长时间(即,多少周期)来完成多个监视装置30的连接建立。由此,能够提高控制装置40的可控性。
146.还在本实施例中,一个控制装置40和多个监视装置30之间的无线通信、即一对多的无线通信在封闭空间内进行。多个监视装置30中的每一个具有事件管理单元352。在多个监视装置30中,事件管理单元352设定通告事件的生成周期,使得第一通告事件的生成时间彼此不同。因此,即使多个监视装置30在启动时执行通告操作,也能够抑制无线电波干扰的发生。尽管在图12中示出两个监视装置30a和30b,类似地,通告事件的生成时间(即通告操
作的时间)对于多个监视装置30a至30h也能够彼此不同。
147.(第三实施例)
148.第三实施例是用作基本配置的前述实施例的修改,并且可以结合前述实施例的描述。在前述实施例中,已经描述了启动时的通告事件。在本实施例中,描述重新连接时的通告事件。
149.图13是显示控制装置40的数据发送和接收时间的图,以便解释断开连接后重新连接。图13作为示例显示了与三个监视装置30(30a、30b、30c)的无线通信。tx表示从控制装置40发送到监视装置30的请求数据的发送时间。rx表示从监视装置30发送到控制装置40的响应数据的接收时间。rx的末尾(即,附加字符)表示哪个监视装置30发送了响应数据。例如,rxa是从监视装置30a发送的响应数据。
150.当控制装置40和一个监视装置30之间的连接状态断开时,控制装置40执行与断开连接的监视装置30的重新连接(连接的建立),同时继续与已经建立连接的其余监视装置30进行通信。例如,由于通信环境的恶化而发生断开连接。在图13所示的示例中,控制装置40与监视装置30b之间的连接断开。控制装置40继续与其余监视装置30连接。具体而言,数据被发送到监视装置30c和从监视装置30c接收数据。然后,当与三个监视装置30的通信完成(成功或不成功)时,控制装置40执行扫描操作以与监视装置30b重新连接。此外,监视装置30b执行通告操作。以这样的方式,控制装置40与监视装置30b之间的连接被重新建立。当重新连接处理完成时,以预定顺序执行与三个监视装置30的数据发送/接收。
151.图14是根据本实施例的电池管理系统60中在连接建立处理期间由事件管理单元352执行的处理的流程图。
152.首先,事件管理单元352如步骤s100的处理中那样生成通告事件(步骤s300)。接着,事件管理单元352确定是否处于启动时间(步骤s310)。即,确定连接是在启动时建立的还是在重新连接时建立的。
153.当确定是启动时的连接时,事件管理单元352如在步骤s120的处理中那样随机地设定通告事件的生成周期(步骤s320)。例如,如在前述实施例中,生成周期通过将作为由特定函数计算的随机数的延迟量(dly)添加到预定周期(int)来随机地设定。
154.另一方面,如果确定不是在启动时,即在重新连接时,事件管理单元352设定比在步骤s320中设定的周期短的周期(步骤s330)。例如,预定周期(int)被设定为生成周期。由于没有添加延迟量,因此它比在步骤s320中设定的周期短。
155.接着,如在步骤s120的处理中那样,事件管理单元352确定是否已经从控制装置40接收到连接请求(步骤s340)。当事件管理单元352在步骤s320或步骤s330设定的周期内接收到连接请求时,事件管理单元352停止通告事件的生成(步骤s350)并结束一系列处理,如在步骤s130中那样。
156.另一方面,如果在步骤s320或步骤s330中设定的周期内没有接收到连接请求,则事件管理单元352在设定的周期过去时重新执行步骤s300之后的处理。即,当设定的周期过去时,事件管理单元352新生成通告事件。
157.在上述事件管理处理中,步骤s340和s350的处理可以是与由无线ic 35的通告操作的继续确定和停止处理共同的处理。步骤s310、s320和s330的处理,即启动确定处理和周期设定处理,可以在通告事件生成处理(步骤s300)之前执行,或者这两个处理可以并行执
行。在电池管理系统60中,由事件管理单元352执行的处理以外的配置与前述实施例中描述的配置相同。
158.《第三实施例的概要》
159.当多个监视装置30之一与控制装置40之间的连接断开时,其余监视装置30与控制装置40之间的无线通信继续(即,保持)。也就是说,只有一个断开连接的监视装置30执行通告操作以便重新建立连接。因此,多个无线ic 35的通告操作不重叠,从而不会发生无线电波干扰。此外,用于发送和接收请求数据和响应数据的频带不同于用于通告操作和扫描操作的频带。因此,即使断开连接的监视装置30的无线ic 35执行通告操作以再次建立连接,也不可能或不会在数据通信期间干扰其他无线电波。
160.在本实施例中,在多个监视装置30之一与控制装置40之间的无线通信连接断开之后重新连接时建立连接的监视装置30的事件管理单元352设定比启动的周期短的事件生成周期。如图15所示,在启动时,生成周期通过将作为由特定函数计算的随机数的延迟量(dly)添加到预定周期(int)来随机地设定。在重新连接时,预定周期(int)被设定为生成周期。因此,通告事件的生成周期在重新连接时比在启动时短。即,通告事件在重新连接时比在启动时发生地更早。在预定周期期间,发生更多的通告事件,因此执行了更多的通告操作。
161.如上所述,在重新连接时,即使执行通告操作,无线电波干扰的可能性也很低,因此通告事件的生成周期能够被缩短,并且与启动时间相比,重新连接时间能够被缩短。以这样的方式,能够抑制继续进行数据通信的另一监视装置30中的延迟,例如控制装置40获取电池信息(即监视数据)中的延迟。根据本实施例,能够在抑制启动时无线电波干扰的同时缩短重新连接时间。
162.通告事件的生成周期不限于以上示例。例如,在上述示例中,重新连接时的周期可以比预定周期(int)短。此外,在第二实施例所示的配置中(参见图11和12),重新连接时的生成周期可以短于启动时的生成周期t0。此外,等待时间可以短于启动时的等待时间wt。
163.(第四实施例)
164.本实施例是用作基本配置的前述实施例的修改,并且可以结合前述实施例的描述。尽管在前述实施例中没有具体提及,但是可以基于识别信息(identification information)来确定通告操作或扫描操作的停止。即,建立连接的目标可以受到限制。
165.图16是显示在根据本实施例的电池管理系统60中建立连接时由每个无线ic 35执行的通告处理的流程图。该通告处理是在建立连接时在由无线ic 35执行的处理中排除由事件管理单元352执行的事件管理处理的处理。图17是显示当在根据本实施例的电池管理系统60中建立连接时由控制装置40执行的扫描处理的流程图。
166.控制装置40预先具有要连接的多个监视装置30(即,无线ic 35)中的每一个的识别信息。多个监视装置30的无线ic 35中的每一个具有要连接的控制装置40(即,无线ic 44)的识别信息。识别信息例如是分配给每个装置的id。
167.如图16所示,监视装置30的无线ic 35首先执行通告操作(步骤s400)。无线ic 35根据由事件管理单元352生成的通告事件执行通告操作。无线ic 35周期性地执行通告操作。
168.当无线ic 35接收到连接请求时(步骤s410),确定它是否已经连接到所有的连接
目标,即,其是否已达到预定连接数(步骤s420)。无线ic 35通过将由无线ic 35保持的连接目标的识别信息与包括在连接请求数据中的识别信息进行核对来确定是否已经连接了所有连接目标。
169.当存在多个连接目标时,如果未完成与所有连接目标的连接,则处理返回到步骤s400的处理。当完成与所有连接目标的连接时,该处理前进到步骤s430。例如,当连接目标是一个控制装置40时,若在步骤s410中接收到连接请求,则随后的步骤s420中的确定处理也是“是”。
170.当与所有连接目标的连接完成时,无线ic 35停止通告操作(步骤s430),并结束一系列处理。
171.如图17所示,控制装置40(即,无线ic 44)首先执行扫描操作(步骤s500)。
172.当控制装置40接收到通告包,即检测到连接目标(步骤s510)时,控制装置40向检测到的连接目标发送连接请求(步骤s520)。此外,控制装置40确定是否所有的连接目标都被连接,即,是否已经达到预定数量的连接(步骤s530)。控制装置40通过将由控制装置40保持的连接目标的识别信息与通告包中包含的识别信息进行核对来确定是否所有的连接目标都被连接。如果未完成与所有连接目标的连接,则处理返回到步骤s400的处理。
173.当与所有连接目标的连接完成时,控制装置40停止扫描操作(步骤s540),并结束一系列处理。
174.在建立连接之后,当在数据通信期间通信环境由于噪声等而恶化并且数据在一定时间段内不能发送/接收时,监视装置30的无线ic 35再次执行图16所示的处理,并且控制装置40再次进行图17所示的处理。例如,当包含电池信息的监视数据在一定时间段不能被发送时,无线ic 35再次进行上述通告操作。当控制装置40在一定时间段内不能接收到包含电池信息的监视数据时,控制装置40重新执行上述通告操作。
175.在电池管理系统60中,除了监视装置30执行的通告处理和控制装置40执行的扫描处理之外,配置与前述实施例中描述的配置相同。
176.《第四实施例的概要》
177.如上所述,在本实施例中,监视装置30预先具有要连接的控制装置40的识别信息,并且当与具有识别信息的所有控制装置40建立连接(即与所有连接目标建立连接)时,停止通告操作。以这种方式,能够抑制错误的连接。例如,能够抑制与存在于所述车辆10周围的另一车辆(例如相同车型)的控制装置的连接的建立。
178.类似地,控制装置40预先具有要连接的监视装置30的识别信息,并且当与具有识别信息的所有监视装置30(即所有连接目标)建立连接时,扫描操作停止。以这种方式,能够抑制错误的连接。例如,能够抑制与存在于所述车辆10周围的另一车辆(例如,相同车型)的监视装置的连接的建立。
179.本实施例中描述的配置能够与前述实施例中描述的任何配置组合。
180.(其它实施例)
181.本说明书和附图中的本公开不限于示例性实施例。本公开包含例示的实施例和本领域技术人员对所例示的实施例做出的变体。例如,本公开不限于实施例中所示的零件和/或元件的组合。公开的组合可以以各种组合来实施。公开的组合可以具有能够添加到实施例的附加零件/部分。本公开包括实施例的零件和/或元件被省略的那些。本公开包括在一
个实施例与另一实施例之间的零件和/或元件的重新分配或组合。公开的技术范围不限于这些实施例的描述。应当理解,所公开的技术范围中的一些(i)由权利要求的描述来表示,并且(ii)包括在权利要求的等同含义和描述范围内的所有修改。
182.说明书、附图等中的本公开不受权利要求的描述限制。说明书、附图等中的本公开包含权利要求中描述的技术思想,并且进一步扩展到比权利要求中的技术思想更广泛的变化。因此,能够从说明书、附图等的本公开提取各种技术思想,而不限于权利要求的描述。
183.当元件或层描述为“布置在上方”或“连接”时,元件或层可以直接布置在另一元件或另一层上方或连接另一元件或另一层,或者中间元件或中间层可以存在于它们之间。相反,当元件或层描述为“直接布置在上方”或“直接连接”时,不存在中间元件或中间层。用于描述元件之间关系的其他术语(例如,“之间”与“直接之间”,以及“相邻”与“直接相邻”)应作类似地解释。如本文中所用的,术语“和/或”包括关于一个或多个相关所列项目的任何组合和所有组合。例如,术语a和/或b包括仅a、仅b、或a和b两者。
184.空间相关术语“内部”、“外部”、“背面”、“底部”、“低”、“顶”、“高”等在本文中用来便于描述一个元素或特征与另一个元素或特征之间的关系的描述。除了附图中描绘的方向之外,空间相关术语能够旨在包括装置在使用或操作中的不同方向。例如,当附图中的装置被翻转时,被描述为在另一元件或特征“下方”或“直接下方”的一个元件指向另一元件或特征的“上方”。因此,术语“下方”可以包括上方和下方。该装置可以被定向在另一个方向(即,旋转90度或在任何其他方向),并且本文中使用的空间相关术语被相应地解释。
185.已经示出了其中微型计算机或ic提供手段和/或功能的示例,但是本公开不限于此。它可以由使用被编程为执行由计算机程序体现的一个或多个功能的处理器的专用计算机来实现。此外,也可以使用专用的硬件逻辑电路来实现。此外,也可以通过将执行计算机程序的处理器与一个或更多个硬件逻辑电路的组合构成的一个或更多个专用计算机来实现。计算机程序还可以作为要由计算机执行的指令存储在计算机可读的、非暂时的、有形的记录介质中。手段和/或功能可以由记录在实质性存储设备中的软件和执行这种软件的计算机、仅软件、仅硬件或其组合来提供。例如,处理器提供的一些或全部功能可以实现为硬件。某项功能实现为硬件的模式包括使用一个或多个ic的模式。处理器可以通过使用mpu、gpu、dfp代替cpu来实现。处理器可以通过组合多种类型的算术处理单元例如cpu、mpu和gpu来实现。处理器可以实施为片上系统(soc)。此外,各种处理单元可以通过使用fpga或asic来实现。各种程序可以存储在非暂时的、实质性的记录介质中。可以采用多种存储介质例如hdd、ssd、闪存、sd卡等作为程序的存储介质的dfp是data flow processor(数据流处理器)的简称。soc是system on chip(片上系统)的缩写。fpga是field programmable gate array(现场可编程门阵列)的缩写。asic是application specific integrated circuit(专用集成电路)的缩写。hdd是hard disk drive(硬盘驱动器)的缩写。ssd是solid state drive(固态硬盘)的缩写。sd是secure digital(安全数字)的缩写。
186.例如,已经示出了监视装置30包括微型计算机34的示例,但是本公开不限于上述内容。如图18所示,可以采用具有监视装置30不包括微型计算机34的配置的电池管理系统60。图18对应于图14。在该配置中,无线ic 35向监视ic 33发送数据/从监视ic 33接收数据。无线ic 35可以通过使用监视ic 33和自诊断的时间表控制来执行感测,或者控制装置40的主微型计算机可以执行相同的操作。
187.构成组装电池20的电池堆21和电池元22的排列和数量不限于上述示例。在电池组11中,监视装置30和/或控制装置40的布置不限于上述示例。
188.例如,在图19所示的例子中,两个电池堆21在y方向上并排布置以形成一对。然后,成对的电池堆21的堆行(stack rows)在x方向上并排布置。在图19中,电池组11具有八个堆行。监视装置30设置在每一个电池堆21中。监视装置30设置在电池堆21在y方向上的侧表面上,该侧表面与成对的电池堆21的面向表面(facing surface)相反。控制装置40基本上布置在多个堆行在x方向上的中心处。控制装置40基本上布置在成对电池堆21在y方向上的中心处。
189.在平面图中,四个监视装置30布置在以控制装置40为中心的虚拟圆的圆周上的不同位置。在图19中,为方便起见,仅示出了一个虚拟圆,但虚拟圆是同心圆,四个监视装置30布置在每个圆的圆周上。此外,在平面图中,两个监视装置30相对于穿过控制装置40的虚拟直线il1线对称地布置。此外,两个监视装置30相对于穿过控制装置40的虚拟直线il2线对称地布置。直线il1是与y方向大致平行的直线,直线il2是与x方向大致平行的直线。此外,在平面图中,控制装置40布置在两个监视装置30的中点处。
190.已经示出了为每个电池堆21布置监视装置30的示例,但是本公开不限于上述内容。例如,可以为多个电池堆21布置一个监视装置30。可以为一个电池堆21布置多个监视装置30。
191.示出了电池组11包括一个控制装置40的示例,但本公开不限于上述。可以提供多个控制装置40。也就是说,电池组11可以包括一个或更多个控制装置40。电池管理系统60可以包括在一个控制装置40与多个监视装置30之间构建的多组无线通信系统。
192.示出了监视装置30包括一个监视ic 33的示例,但本公开不限于上述。可以提供多个监视ic 33。在这种情况下,可以为每个监视ic 33提供一个无线ic 35,或者可以为多个监视ic 33提供一个无线ic 35。
193.尽管在上述示例中与控制装置40执行无线通信的所有监视装置30都具有事件管理单元352,但是例如,可以仅两个监视装置30具有事件管理单元352。在分别具有事件管理单元352的两个监视装置30中,能够抑制在启动时无线电波干扰的发生。即,两个或更多个监视装置30可以具有事件管理单元352。由于事件管理单元352管理通告事件的生成周期以在各个不同的时间执行通告操作,因此在两个或更多个具有事件管理单元352的监视装置30中在启动时发生无线电波干扰是可抑制的。
194.监视ic 33也称为“监视器单元监控器(monitor cell supervisor)”。
195.微型计算机34也被称为“监视器计算机”。
196.无线电路单元35也称为“监视器收发器(monitor transceiver)”。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。