1.本发明涉及一种基于自适应参数估计的下肢外骨骼灵敏度放大控制方法,属于外骨骼控制技术领域。
背景技术:
2.下肢外骨骼机器人是一种拟人化的仿生结构,可穿戴于人体,能够满足人体的步态需求,并为人体提供辅助作用,增强人体机能,能够在操作者的控制下完成一定的功能和任务,无论在军事领域还是民用领域都有非常广阔的应用前景。
3.先进控制方法的应用能给外骨骼机器人带来更好的人机交互性能。目前,已有许多控制方法应用于下肢外骨骼机器人系统,如模糊控制、滑模控制、自抗扰控制、自适应阻抗控制等,而灵敏度放大控制更是凭借其优良的性能早在21世纪初期就成功的应用于bleex,hulc等外骨骼,灵敏度放大控制算法能保证外骨骼和穿戴者之间的交互力保持在0的小领域内。此外,该控制方法不需要直接测量人机交互力,因此可以降低外骨骼系统的复杂性。在经典和现代控制理论中,通常都需要使系统对外部干扰的灵敏度最小化。但对于外骨骼控制,需要一个完全相反的目标:最大限度地提高闭环系统对外力的灵敏度。然而系统对外力的高灵敏度导致系统失去鲁棒性。这就要求提高外骨骼动力学模型的精度。
技术实现要素:
4.本发明提供了一种基于自适应参数估计的下肢外骨骼灵敏度放大控制方法,用于下肢外骨骼机器人的控制。
5.本发明的技术方案是:一种基于自适应参数估计的下肢外骨骼灵敏度放大控制方法,包括:
6.建立下肢外骨骼机器人单腿的两自由度动力学模型;
7.对所建立的下肢外骨骼机器人单腿的两自由度动力学模型未知参数进行在线估计,获得估计的下肢外骨骼机器人单腿的两自由度动力学模型;
8.将估计的下肢外骨骼机器人单腿的两自由度动力学模型代入灵敏度放大控制器中,得到所需的控制律。
9.所述建立下肢外骨骼机器人单腿的两自由度动力学模型,包括:运用下肢外骨骼几何模型,得到杆件与旋转中心的距离表达式,以及杆件质心的速度表达式,并依据表达式确定系统动能和系统势能,最后得到下肢外骨骼机器人单腿的两自由度动力学模型。
10.所述建立下肢外骨骼机器人单腿的两自由度动力学模型,包括:
11.定义拉格朗日量l为:
12.l=e
k-e
p
(1)
13.式中:ek为下肢外骨骼机器人系统动能,e
p
为下肢外骨骼机器人系统势能;
14.拉格朗日量l对q求偏导后对时间t求微分得到拉格朗日方程:
[0015][0016]
式中:t为运动中所有广义外力矢量,q为系统的广义坐标矢量;
[0017]
根据下肢外骨骼几何模型,得到大腿杆件质心12到髋关节旋转中心10的距离,小腿杆件质心13到膝关节旋转中心11的距离为:
[0018][0019]
式中:l
c,h
为大腿杆件质心12到髋关节旋转中心10的距离,l
c,k
为小腿杆件质心13到膝关节旋转中心11的距离,x
c,h y
c,h
为大腿杆件质心12的空间坐标,x
c,k y
c,k
为小腿杆件质心13的空间坐标;
[0020]
杆件质心的速度为:
[0021][0022]
式中:vh为大腿杆件质心12的速度,vk为小腿杆件质心13的速度,为髋关节旋转中心10的角速度,为膝关节旋转中心11的角速度;
[0023]
下肢外骨骼机器人单腿有两个主动自由度,下肢外骨骼机器人系统的动能为:
[0024][0025]
式中:e
k,h
、e
k,k
分别为大腿杆件6、小腿杆件8的动能;mh、mk分别为大腿杆件6、小腿杆件8的髋关节旋转中心10的质量;ih、ik分别为大腿杆件6、小腿杆件8的转动惯量;分别分别髋关节旋转中心10、膝关节旋转中心11的角加速度;qh,分别为髋关节旋转中心10的角度、角速度、角加速度;qk,分别为膝关节旋转中心11的角度、角速度、角加速度;
[0026]
下肢外骨骼机器人系统的势能为:
[0027]ep
=mhgl
c,h cos qh mkg(l
c,h cos qh l
c,k cos qk)
ꢀꢀꢀ
(6)
[0028]
式中:g为重力加速度;
[0029]
基于拉格朗日方程,得到下肢外骨骼机器人单腿的两自由度动力学模型:
[0030][0031]
式中:m(q)为惯性矩阵,为向心力矩阵,g(q)为重力向量;τ为下肢外骨骼机器人系统的驱动器产生的驱动力矩。
[0032]
所述惯性矩阵、向心力矩阵,重力向量,下肢外骨骼系统的驱动力矩,具体如下:
[0033][0034][0035][0036]m21
(q)=m
12
(q)
[0037][0038][0039][0040][0041][0042][0043][0044][0045][0046]
式中:m
11
(q)、m
12
(q)、m
21
(q)、m
22
(q)表示惯性矩阵中的元素;表示向心力矩阵中的元素,g1(q)、g2(q)表示重力向量中的元素。
[0047]
所述对所建立的下肢外骨骼机器人单腿的两自由度动力学模型未知参数进行在线估计,获得估计的下肢外骨骼机器人单腿的两自由度动力学模型,包括:对所得到的下肢外骨骼机器人单腿的两自由度动力学模型进行线性参数化处理,通过引入一阶低通滤波操作,并设计一种基于参数估计误差驱动的自适应律对未知参数进行有效估计。
[0048]
所述对所建立的下肢外骨骼机器人单腿的两自由度动力学模型未知参数进行在线估计,获得估计的下肢外骨骼机器人单腿的两自由度动力学模型,包括:
[0049]
将下肢外骨骼机器人单腿的两自由度动力学模型等式左边部分改写为线性参数化的形式:
[0050]
[0051]
式中:m(q)为惯性矩阵,为向心力矩阵,g(q)为重力向量,惯性矩阵、向心力矩阵,重力向量为下肢外骨骼机器人单腿的两自由度动力学模型中含有未知参数的矩阵;θ是一个关于mh,mk的待估计的常数向量,是已知的回归矩阵;
[0052]
然后定义中间参数
[0053]
得到:
[0054][0055]
式中:为不包含加速度项的回归矩阵;
[0056]
将下肢外骨骼机器人单腿的两自由度动力学模型改写,获得重构的下肢外骨骼机器人单腿的两自由度动力学模型:
[0057][0058]
式中:
[0059]
对重构的下肢外骨骼机器人单腿的两自由度动力学模型等式两边同时引入低通滤波,得到:
[0060][0061]
式中:分别是滤波后的回归矩阵;τf表示低通滤波后的τ;
[0062][0063]
式中:k表示低通滤波系数,t表示时间;
[0064]
将公式(12)代入公式(11),得到:
[0065][0066]
式中:是一个新的回归矩阵,且不包含加速度
[0067]
然后定义矩阵p1和向量q1:
[0068][0069]
式中:是一个可调参数;表示的转置;p1(0)、q1(0)分别表示
矩阵p1、向量q1在初始时刻t=0时的取值;
[0070]
定义向量w1为:
[0071][0072]
式中:表示与θ的误差;
[0073]
设计对应的系统估计参数的自适应律为:
[0074][0075]
式中:γ>0为学习增益矩阵;
[0076]
通过将估计的值代回到公式(7),则得到估计的下肢外骨骼机器人单腿的两自由度动力学模型:
[0077][0078]
式中:分别表示估计的下肢外骨骼机器人单腿的两自由度动力学模型的惯性矩阵、向心力矩阵、重力向量。
[0079]
所述将估计的下肢外骨骼机器人单腿的两自由度动力学模型代入灵敏度放大控制器中,得到所需的控制律,包括:
[0080]
定义g
hm
是人机交互的模型,g
exo
是估计的下肢外骨骼机器人单腿的两自由度动力学模型,τh是人机交互作用力,τ是下肢外骨骼机器人系统的驱动器产生的驱动力矩,表示下肢外骨骼机器人系统的输出轨迹参数,则有:
[0081]
q=τ
hghm
τg
exo
ꢀꢀꢀ
(18)
[0082]
τs=τ τhꢀꢀꢀ
(19)
[0083]
式中:τs表示在人机交互模型下下肢外骨骼机器人系统中关节产生的力矩;
[0084]
设计灵敏度放大控制律为:
[0085][0086]
式中:α为灵敏度放大因子;分别表示估计的下肢外骨骼机器人单腿的两自由度动力学模型的惯性矩阵、向心力矩阵、重力向量。
[0087]
所述下肢外骨骼几何模型通过下肢外骨骼机器人系统简化:将髋关节滑轮模块5简化为髋关节旋转中心10,将膝关节滑轮模块7简化为膝关节旋转中心11,将大腿杆件质心12作为大腿杆件6的质心,将小腿杆件质心13作为小腿杆件8的质心。
[0088]
根据本发明实施例的另一方面,提供了一种基于自适应参数估计的下肢外骨骼灵敏度放大控制装置,包括:
[0089]
第一模块,用于建立下肢外骨骼机器人单腿的两自由度动力学模型;
[0090]
第二模块,用于对所建立的下肢外骨骼机器人单腿的两自由度动力学模型未知参数进行在线估计,获得估计的下肢外骨骼机器人单腿的两自由度动力学模型;
[0091]
第三模块,用于将估计的下肢外骨骼机器人单腿的两自由度动力学模型代入灵敏度放大控制器中,得到所需的控制律。
[0092]
根据本发明实施例的另一方面,提供了一种处理器,所述处理器用于运行程序,其
中,所述程序运行时执行上述中任意一项所述的基于自适应参数估计的下肢外骨骼灵敏度放大控制方法。
[0093]
本发明的有益效果是:
[0094]
1.灵敏度放大控制算法和其它基于模型的外骨骼控制算法相比,不需要直接测量人机交互力,可以降低外骨骼系统的复杂性,在此基础上本发明提供的控制方法也进一步保证了系统对外力高灵敏度的同时而不失去系统的鲁棒性。
[0095]
2.由于灵敏度放大控制算法是基于模型的控制算法,其动力学模型的精确程度直接影响算法的控制效果,本发明提供的自适应参数估计算法能在线对下肢外骨骼动力学模型参数进行精确估计,从而提高灵敏度放大控制算法的性能。
[0096]
综上,本发明针对灵敏度放大控制存在的问题,提出一种在线参数估计方法,用于设计控制器所需的参数,改进后的灵敏度放大控制在确保参数收敛到真值的同时也实现了外骨骼的关节轨迹与人体的行走轨迹的高度重合。
附图说明
[0097]
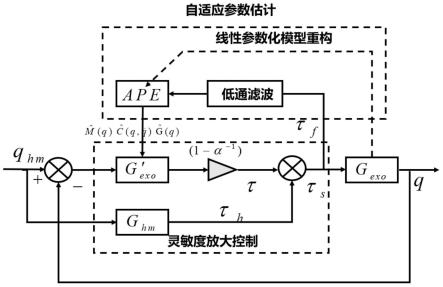
图1为本发明灵敏度放大控制原理框图;
[0098]
图2为单腿下肢外骨骼机械结构图;
[0099]
图3为下肢外骨骼几何模型;
[0100]
图4为髋关节角度跟踪曲线图;
[0101]
图5为膝关节角度跟踪曲线图;
[0102]
图6为自适应参数估计效果图;
[0103]
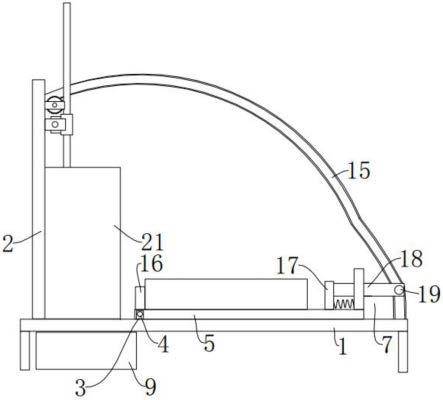
图中各标号为:1-绕线轮、2-动力系统、3-滑轮模块、4-腰部构件、5-髋关节滑轮模块、6-大腿杆件、7-膝关节滑轮模块、8-小腿杆件、9-人体躯干、10-髋关节旋转中心、11-膝关节旋转中心、12-大腿杆件质心、13-小腿杆件质心。
具体实施方式
[0104]
下面结合附图和实施例,对发明做进一步的说明,但本发明的内容并不限于所述范围。
[0105]
实施例1:如图1-6所示,一种基于自适应参数估计的下肢外骨骼灵敏度放大控制方法,建立下肢外骨骼机器人单腿的两自由度动力学模型;
[0106]
对所建立的下肢外骨骼机器人单腿的两自由度动力学模型未知参数进行在线估计,获得估计的下肢外骨骼机器人单腿的两自由度动力学模型;
[0107]
将估计的下肢外骨骼机器人单腿的两自由度动力学模型代入灵敏度放大控制器中,得到所需的控制律。
[0108]
进一步地,可以设置所述建立下肢外骨骼机器人单腿的两自由度动力学模型,包括:运用下肢外骨骼几何模型,得到杆件与旋转中心的距离表达式,以及杆件质心的速度表达式,并依据表达式确定系统动能和系统势能,最后得到下肢外骨骼机器人单腿的两自由度动力学模型。
[0109]
进一步地,可以设置所述建立下肢外骨骼机器人单腿的两自由度动力学模型,包括:
[0110]
定义拉格朗日量l为:
[0111]
l=e
k-e
p
ꢀꢀꢀ
(1)
[0112]
式中:ek为下肢外骨骼机器人系统动能,e
p
为下肢外骨骼机器人系统势能;
[0113]
拉格朗日量l对q求偏导后对时间t求微分得到拉格朗日方程:
[0114][0115]
式中:t为运动中所有广义外力矢量(包括力和力矩),q为系统的广义坐标矢量(此处定义的拉格朗日方程为普适方程,在后续模型中,表示下肢外骨骼机器人系统的输出轨迹参数,对应qh,qk);
[0116]
根据图3下肢外骨骼几何模型,得到大腿杆件质心12到髋关节旋转中心10的距离,小腿杆件质心13到膝关节旋转中心11的距离为:
[0117][0118]
式中:l
c,h
为大腿杆件质心12到髋关节旋转中心10的距离,l
c,k
为小腿杆件质心13到膝关节旋转中心11的距离,x
c,h y
c,h
为大腿杆件质心12的空间坐标,x
c,k y
c,k
为小腿杆件质心13的空间坐标;
[0119]
杆件质心的速度为:
[0120][0121]
式中:vh为大腿杆件质心12的速度,vk为小腿杆件质心13的速度,为髋关节旋转中心10的角速度,为膝关节旋转中心11的角速度;
[0122]
下肢外骨骼机器人单腿有两个主动自由度(包括髋关节和膝关节),下肢外骨骼机器人系统的动能为:
[0123][0124]
式中:e
k,h
、e
k,k
分别为大腿杆件6、小腿杆件8的动能;mh、mk分别为大腿杆件6、小腿杆件8的髋关节旋转中心10的质量;ih、ik分别为大腿杆件6、小腿杆件8的转动惯量;分别分别髋关节旋转中心10、膝关节旋转中心11的角加速度;qh,分别为髋关节旋转中心10的角度、角速度、角加速度;qk,分别为膝关节旋转中心11的角度、角速度、角加速度;
[0125]
下肢外骨骼机器人系统的势能为:
[0126]ep
=mhgl
c,h cos qh mkg(l
c,h cos qh l
c,k cos qk)
ꢀꢀꢀ
(6)
[0127]
式中:g为重力加速度;
[0128]
基于拉格朗日方程,得到下肢外骨骼机器人单腿的两自由度动力学模型:
[0129][0130]
式中:m(q)为惯性矩阵,为向心力矩阵,g(q)为重力向量;τ为下肢外骨骼机器人系统的驱动器产生的驱动力矩。
[0131]
进一步地,可以设置所述惯性矩阵、向心力矩阵,重力向量,下肢外骨骼系统的驱动力矩,具体如下:
[0132][0133][0134][0135]m21
(q)=m
12
(q)
[0136][0137][0138][0139][0140][0141][0142][0143][0144][0145]
式中:m
11
(q)、m
12
(q)、m
21
(q)、m
22
(q)表示惯性矩阵中的元素;表示向心力矩阵中的元素,g1(q)、g2(q)表示重力向量中的元素。
[0146]
进一步地,可以设置所述对所建立的下肢外骨骼机器人单腿的两自由度动力学模型未知参数进行在线估计,获得估计的下肢外骨骼机器人单腿的两自由度动力学模型,包括:对所得到的下肢外骨骼机器人单腿的两自由度动力学模型进行线性参数化处理,通过引入一阶低通滤波操作消除掉关节角加速度项,并设计一种基于参数估计误差驱动的自适
应律对未知参数进行有效估计。
[0147]
具体而言,针对下肢外骨骼机器人单腿的两自由度动力学模型中含有未知参数的矩阵:m(q),g(q),对所得到的下肢外骨骼机器人单腿的两自由度动力学模型进行线性参数化处理,通过引入一阶低通滤波操作消除掉关节角加速度项,在满足持续激励的条件下,并设计一种基于参数估计误差驱动的自适应律对未知参数进行有效估计。
[0148]
进一步地,可以设置所述对所建立的下肢外骨骼机器人单腿的两自由度动力学模型未知参数进行在线估计,获得估计的下肢外骨骼机器人单腿的两自由度动力学模型,包括:
[0149]
将下肢外骨骼机器人单腿的两自由度动力学模型等式左边部分改写为线性参数化的形式:
[0150][0151]
式中:m(q)为惯性矩阵,为向心力矩阵,g(q)为重力向量,惯性矩阵、向心力矩阵,重力向量为下肢外骨骼机器人单腿的两自由度动力学模型中含有未知参数的矩阵;θ是一个关于mh,mk的待估计的常数向量,是已知的回归矩阵;
[0152]
然后定义中间参数
[0153]
得到:
[0154][0155]
式中:为不包含加速度项的回归矩阵;
[0156]
将下肢外骨骼机器人单腿的两自由度动力学模型改写,获得重构的下肢外骨骼机器人单腿的两自由度动力学模型:
[0157][0158]
式中:
[0159]
对重构的下肢外骨骼机器人单腿的两自由度动力学模型等式两边同时引入低通滤波得到:
[0160][0161]
式中:分别是滤波后的回归矩阵;τf表示低通滤波后的τ;
[0162][0163]
式中:k表示低通滤波系数,t表示时间;
[0164]
将公式(12)代入公式(11),得到:
[0165][0166]
式中:是一个新的回归矩阵,且不包含加速度
[0167]
然后定义矩阵p1和向量q1:
[0168][0169]
式中:是一个可调参数;表示的转置;p1(0)、q1(0)分别表示矩阵p1、向量q1在初始时刻t=0时的取值;
[0170]
定义向量w1为:
[0171][0172]
式中:表示与θ的误差;
[0173]
设计对应的系统估计参数的自适应律为:
[0174][0175]
式中:γ>0为学习增益矩阵;
[0176]
通过将估计的值代回到公式(7),则得到估计的下肢外骨骼机器人单腿的两自由度动力学模型:
[0177][0178]
式中:分别表示估计的下肢外骨骼机器人单腿的两自由度动力学模型的惯性矩阵、向心力矩阵、重力向量。
[0179]
进一步地,可以设置所述将估计的下肢外骨骼机器人单腿的两自由度动力学模型代入灵敏度放大控制器中,得到所需的控制律,包括:
[0180]
如图1所示,定义g
hm
是人机交互的模型,g
exo
是估计的下肢外骨骼机器人单腿的两自由度动力学模型,ge′
xo
是估计的下肢外骨骼机器人单腿的两自由度逆动力学模型,τh是人机交互作用力,τ是下肢外骨骼机器人系统的驱动器产生的驱动力矩,表示下肢外骨骼机器人系统的输出轨迹参数,则有:
[0181]
q=τ
hghm
τg
exo
ꢀꢀꢀ
(18)
[0182]
τs=τ τhꢀꢀꢀ
(19)
[0183]
式中:τs表示在人机交互模型下下肢外骨骼机器人系统中关节产生的力矩;
[0184]
设计灵敏度放大控制律为:
[0185]
[0186]
式中:α为灵敏度放大因子;分别表示估计的下肢外骨骼机器人单腿的两自由度动力学模型的惯性矩阵、向心力矩阵、重力向量。
[0187]
通过公式(7)和公式(20),可以得到:
[0188][0189]
进一步地,将下肢外骨骼机器人系统简化成下肢外骨骼几何模型:将髋关节滑轮模块5简化为髋关节旋转中心10,将膝关节滑轮模块7简化为膝关节旋转中心11,将大腿杆件质心12作为大腿杆件6的质心,将小腿杆件质心13作为小腿杆件8的质心。
[0190]
具体而言,下肢外骨骼机器人系统如图2所示,包括:绕线轮1、动力系统2、滑轮模块3、腰部构件4、大腿杆件6、小腿杆件8;滑轮模块3包括髋关节滑轮模块5、膝关节滑轮模块7,安装在腰部构件4上的动力系统2用于驱动绕线轮1,髋关节滑轮模块5一端连接腰部构件4,髋关节滑轮模块5另一端连接大腿杆件6一端,大腿杆件6另一端连接膝关节滑轮模块7一端,膝关节滑轮模块7另一端连接小腿杆件8一端。
[0191]
一种基于自适应参数估计的下肢外骨骼灵敏度放大控制装置,包括:
[0192]
第一模块,用于建立下肢外骨骼机器人单腿的两自由度动力学模型;
[0193]
第二模块,用于对所建立的下肢外骨骼机器人单腿的两自由度动力学模型未知参数进行在线估计,获得估计的下肢外骨骼机器人单腿的两自由度动力学模型;
[0194]
第三模块,用于将估计的下肢外骨骼机器人单腿的两自由度动力学模型代入灵敏度放大控制器中,得到所需的控制律。
[0195]
一种处理器,所述处理器用于运行程序,其中,所述程序运行时执行上述中任意一项所述的基于自适应参数估计的下肢外骨骼灵敏度放大控制方法。
[0196]
仿真试验:
[0197]
在matlab中对所设计的控制器进行仿真,设置下肢外骨骼的参数:大腿质量mh=0.35kg,小腿质量mk=0.30kg,大腿杆长度l
c,h
=0.25m,小腿杆长度l
c,k
=0.25m,重力加速度g=9.8m/s2。由于系统只有两个主动自由度,主动自由度包括髋关节和膝关节,根据cga临床步态数据库,获得离散点,将获得的离散点拟合为时间2s的方程:
[0198][0199]
式中:q
hmh
、q
hmk
为实际人体一个步态周期内髋关节和膝关节的轨迹,即图1中q
hm
。
[0200]
通过matlab/simulink仿真平台将所设计的控制器代入下肢外骨骼机器人单腿的两自由度动力学模型得到如图4、图5的跟踪控制效果。图4、图5表明,下肢外骨骼机器人系统的关节轨迹与人体的行走轨迹基本吻合,实现了高度跟随(其中,图4中,reference hip signal表示实际人体一个步态周期内髋关节的轨迹,actual hip signal表示下肢外骨骼机器人系统髋关节的实际输出轨迹;图5中,reference knee signal表示实际人体一个步态周期内膝关节的轨迹,actual knee signal表示下肢外骨骼机器人系统膝关节的实际输出轨迹)。图6表明,所采用的参数估计算法有效的收敛到真值,证明了本发明的有效性。
[0201]
上面结合附图对本发明的具体实施方式作了详细说明,但是本发明并不限于上述实施方式,在本领域普通技术人员所具备的知识范围内,还可以在不脱离本发明宗旨的前提下做出各种变化。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。