1.技术领域一般涉及载具,更具体地说,涉及用于在道路海拔转变期间控制载具的方法和系统。
背景技术:
2.如今,某些载具包括用于基于估计载具所行驶道路的道路坡度角和倾斜角来控制载具的系统。然而,这种现有的载具系统通常包括在载具所处的时间点和位置的载具单点估计,并且这种现有的载具系统在导致次优控制性能的某些情况下可能不提供最佳估计。
3.因此,期望提供用于在道路海拔转变期间控制载具的改进的方法和系统。
技术实现要素:
4.根据示例性实施例,提供了一种方法,包括:从载具上的一个或多个传感器获得传感器数据;获得与载具位置相关的位置数据;获得与对应于该位置的路径相关的地图数据;使用处理器,使用传感器数据和地图数据生成沿着路径的海拔分布;以及基于处理器提供的指令,使用预测的海拔分布主动控制载具。
5.此外,在一示例性实施例中,该方法还包括:接收关于载具行驶目的地的用户输入;以及基于用户输入和位置数据,生成沿着与所述路径相关联的道路行进到目的地的计划任务;其中生成海拔分布的步骤包括,通过处理器,使用传感器数据和地图数据,根据计划任务生成在道路的逐渐远离的预测地平线上的道路海拔分布;并且其中控制载具的步骤包括,基于由处理器提供的指令,使用逐渐远离的预测地平线上的预测的道路海拔分布来控制载具。
6.此外,在一示例性实施例中,道路海拔分布包括道路的坡度角和倾斜角以及逐渐远离的预测地平线的分布。
7.此外,在一示例性实施例中,道路海拔分布由处理器基于摄像头数据以及道路的车道水平地图数据生成。
8.此外,在一示例性实施例中,该方法还包括,经由处理器执行从道路坐标到载具坐标的海拔分布的转换,生成转换后的海拔分布。
9.此外,在一示例性实施例中,控制载具的步骤包括,基于转换后的海拔分布,经由处理器提供的指令来控制载具的横向动态。
10.此外,在一示例性实施例中,控制载具的步骤包括,基于转换后的海拔分布,经由处理器提供的指令控制载具的纵向动态。
11.在另一示例性实施例中,提供了一种系统,该系统包括:一个或多个传感器,其被配置为至少有助于获得载具的动态测量和路径信息;一个或多个位置系统,被配置为至少有助于获得与载具位置相关的位置数据;计算机存储器,被配置为存储与对应于所述位置的路径相关的地图数据;以及处理器,被配置为至少有助于:使用传感器数据和地图数据生成沿着路径的海拔分布;以及提供使用海拔分布控制载具的指令。
12.此外,在一示例性实施例中,一个或多个传感器被配置成至少有助于接收关于载具行驶目的地的用户输入;并且处理器被配置成至少有助于:基于用户输入和位置数据,生成沿着与路径相关联的道路行进到目的地的计划任务;使用所述传感器数据和所述地图数据,根据所述计划任务,在所述道路的逐渐远离的预测地平线上生成道路海拔分布;以及使用逐渐远离的预测地平线上的道路海拔分布提供用于控制载具的指令。
13.此外,在一示例性实施例中,道路海拔分布包括道路的坡度角和倾斜角以及逐渐远离的预测地平线的分布。
14.此外,在一示例性实施例中,处理器被配置成至少有助于基于摄像头数据以及道路的车道水平地图数据来生成道路海拔分布。
15.此外,在一示例性实施例中,其中处理器被配置成至少有助于执行从道路坐标到载具坐标的海拔分布的转换,生成转换后的海拔分布。
16.此外,在一示例性实施例中,处理器还被配置成至少有助于基于转换后的海拔分布来控制载具的横向移动。
17.此外,在一示例性实施例中,处理器还被配置成至少有助于基于转换后的海拔分布来控制载具的纵向移动。
18.在另一示例性实施例中,提供了一种载具,其包括:车身;推进系统,被配置为产生车身的运动;布置在载具上的一个或多个传感器,其被配置成至少有助于获得载具的传感器数据;一个或多个位置系统,被配置为至少有助于获得与载具位置相关的位置数据;计算机存储器,被配置为存储与对应于该位置的路径相关的地图数据;以及设置在载具上的处理器,该处理器被配置成至少有助于:使用传感器数据和地图数据生成沿着路径的海拔分布;以及提供使用海拔分布控制载具的指令。
19.此外,在一示例性实施例中,一个或多个传感器被配置成至少有助于接收关于载具行驶目的地的用户输入;并且处理器被配置成至少有助于:基于用户输入和位置数据,生成沿着与路径相关联的道路行进到目的地的计划任务;使用所述传感器数据和所述地图数据,根据所述计划任务,在所述道路的逐渐远离的预测地平线上生成道路海拔分布;以及使用逐渐远离的预测地平线上的道路海拔分布提供用于控制载具的指令。
20.此外,在一示例性实施例中,道路海拔分布包括道路的坡度角和倾斜角以及逐渐远离的预测地平线的分布。
21.此外,在一示例性实施例中,处理器被配置成至少有助于基于摄像头数据以及道路的车道水平地图数据来生成道路海拔分布。
22.此外,在一示例性实施例中,处理器被配置成至少有助于执行从道路坐标到载具坐标的海拔分布的转换,生成转换后的海拔分布。
23.此外,在示例性实施例中,处理器还被配置成至少有助于基于转换后的海拔分布来控制载具的横向移动和纵向移动。
附图说明
24.下文将结合以下附图描述本公开,其中相同的附图标记表示相同的元件,并且其中:
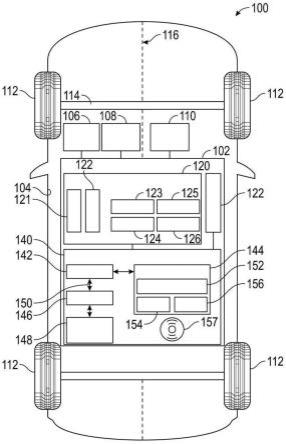
25.图1是根据示例性实施例的载具的功能框图,该载具包括用于相对于道路海拔转
变控制载具的控制系统;
26.图2是根据示例性实施例的图1的控制系统的模块的框图;
27.图3是根据示例性实施例的用于相对于道路海拔转变来控制载具的过程流程图,该过程可以结合图1的载具以及图1和2的控制系统来实现;和
28.图4-9示出了根据示例性实施例的图3的过程的某些实施方式。
具体实施方式
29.以下详细描述本质上仅仅是示例性的,并不旨在限制本公开或其应用和用途。此外,不打算受前面背景技术或下面详细描述中提出的任何理论的约束。
30.图1示出了根据示例性实施例的载具100。如下面更详细描述的,根据示例性实施例,载具100包括控制系统102,其用于使用传感器、位置和地图数据利用具有预测时间范围(time horizon)的主动模型控制来控制载具100的道路海拔转变。
31.在各种实施例中,载具(vehicle)100包括汽车。在某些实施例中,载具100可以是多种不同类型的汽车中的任何一种,例如轿车、货车、卡车或运动型多功能车(suv),并且可以是两轮驱动(2wd)(即后轮驱动或前轮驱动)、四轮驱动(4wd)或全轮驱动(awd),和/或各种其他类型的载具。在某些实施例中,载具100还可以包括摩托车或其他载具,例如飞机、航天器、船只等,和/或一个或多个其他类型的移动平台(例如,机器人和/或其他移动平台)。
32.载具100包括布置在底盘116上的车身104。车身104基本上包围载具100的其他部件。车身104和底盘116可以共同形成框架。载具100还包括多个车轮112。车轮112每个都在车身104的相应拐角附近可旋转地连接到底盘116,以便于载具100的运动。在一个实施例中,载具100包括四个车轮112,尽管这可以在其他实施例中变化(例如对于卡车和某些其他载具)。
33.驱动系统110安装在底盘116上,并例如通过轴114驱动车轮112。驱动系统110优选包括推进系统。在某些示例性实施例中,驱动系统110包括内燃机和/或电动机/发电机,并与其变速器连接。在某些实施例中,驱动系统110可以变化,和/或可以使用两个或更多个驱动系统112。举例来说,载具100还可以结合多种不同类型的推进系统中的任何一种或其组合,例如汽油或柴油燃料的内燃机、“柔性燃料载具”(ffv)发动机(即,使用汽油和酒精的混合物)、气体化合物(例如,氢气和/或天然气)燃料的发动机、燃烧/电动机混合发动机和电动机。
34.如图1所示,在各种实施例中,载具还包括制动系统106和转向系统108。在示例性实施例中,制动系统106使用制动部件来控制载具100的制动,该制动部件经由驾驶员提供的输入(例如,在某些实施例中经由制动踏板)和/或经由控制系统102自动控制。此外,在一示例性实施例中,转向系统108经由转向部件(例如,联接到车轴114和/或车轮112的转向柱)来控制载具100的转向,该转向部件经由驾驶员提供的输入(例如,在某些实施例中经由方向盘)和/或自动地经由控制系统102来控制。
35.在图1所示的实施例中,控制系统102连接到制动系统106、转向系统108和驱动系统110。同样如图1所示,在各种实施例中,控制系统102包括传感器阵列120、位置系统130和控制器140。
36.在各种实施例中,传感器阵列120包括获得传感器数据的各种传感器,用于跟踪道
路高度并基于道路高度控制载具10。在所描绘的实施例中,传感器阵列120包括惯性测量传感器121、输入传感器122(例如,测量由驾驶员提供的制动输入的制动踏板传感器、和/或触摸屏传感器、和/或被配置为从载具10的驾驶员或其他用户接收输入的其他输入传感器);转向传感器123(例如,联接到载具10的方向盘和/或车轮并被配置成测量其转向角)、扭矩传感器124(例如,被配置成测量载具的扭矩)、速度传感器125(例如,被配置成测量载具的速度和/或速率和/或用于计算这种速度和/或速率的数据的车轮速度传感器和/或其他传感器)、摄像头126(例如,被配置成获得载具行驶的道路的摄像头图像)。
37.同样在各种实施例中,位置系统130被配置成获得和/或生成关于载具所处和/或行驶的位置和/或方位的数据。在某些实施例中,位置系统130包括和/或联接到基于卫星的网络和/或系统,例如全球位置系统(gps)和/或其他基于卫星的系统。
38.在各种实施例中,控制器140联接到传感器阵列120和位置系统130。同样在各种实施例中,控制器140包括计算机系统(这里也称为计算机系统14),并且包括处理器142、存储器144、接口146、存储设备148和计算机总线150。在各种实施例中,控制器(或计算机系统)140基于道路倾斜和坡度且在道路海拔转变期间控制载具运行。在各种实施例中,控制器140根据图3的过程步骤和图4-9的实现提供这些和其他功能。
39.在各种实施例中,控制器140(以及在某些实施例中,控制系统102本身)设置在载具100的车身104内。在一个实施例中,控制系统102安装在底盘116上。在某些实施例中,控制器140和/或控制系统102和/或其一个或多个部件可以设置在车身104的外部,例如远程服务器上、云端或远程地执行图像处理的其他设备上。
40.应当理解,控制器140可以不同于图1所示的实施例。例如,控制器140可以联接到或者可以利用一个或多个远程计算机系统和/或其他控制系统,例如作为一个或多个上述载具100设备和系统的一部分。
41.在所描绘的实施例中,控制器140的计算机系统包括处理器142、存储器144、接口146、存储设备148和总线150。处理器142执行控制器140的计算和控制功能,并且可以包括任何类型的处理器或多个处理器、诸如微处理器的单个集成电路、或者任何合适数量的集成电路设备和/或电路板,它们协同工作以实现处理单元的功能。在操作期间,处理器142执行包含在存储器144中的一个或多个程序152,并且因此控制所述控制器140以及控制器140的计算机系统的一般操作,通常是在执行这里描述的过程中,例如下面结合图3、图4-9的实施例进一步讨论的过程300。
42.存储器144可以是任何类型的合适存储器。例如,存储器144可以包括各种类型的动态随机存取存储器(dram),例如sdram、各种类型的静态ram和各种类型的非易失性存储器(prom、eprom和闪存)。在某些示例中,存储器144位于和/或共同位于与处理器142相同的计算机芯片上。在所描绘的实施例中,存储器144存储上述程序152以及地图数据154(例如,来自位置系统130和/或结合位置系统130使用)和一个或多个存储值156(例如,在各种实施例中,包括来自即将到来的路段和/或其他道路的道路海拔数据、和/或用于基于道路倾斜和/或坡度进行确定和/或实施载具控制的阈值)。
43.总线150用于在控制器140的计算机系统的各种部件之间传输程序、数据、状态和其他信息或信号。接口146允许例如从系统驱动器和/或另一个计算机系统到控制器140的计算机系统的通信,并且可以使用任何合适的方法和装置来实现。在一个实施例中,接口
146从传感器阵列120和/或位置系统130获得各种数据。接口146可以包括一个或多个网络接口,以与其他系统或部件通信。接口146还可以包括一个或多个网络接口以与技术人员通信,和/或一个或多个存储接口以连接到存储设备,例如存储设备148。
44.存储设备148可以是任何合适类型的存储装置,包括各种不同类型的直接存取存储器和/或其他存储设备。在一个示例性实施例中,存储设备148包括程序产品,存储器144可以从该程序产品接收程序152,该程序152执行本公开的一个或多个过程的一个或多个实施例,例如下面结合图3、图4-9的实施例进一步讨论的过程300的步骤。在另一个示例性实施例中,程序产品可以直接存储在存储器144和/或磁盘(例如,磁盘157)中和/或由存储器144和/或磁盘(例如,磁盘157)访问,如下所述。
45.总线150可以是连接计算机系统和部件的任何合适的物理或逻辑装置。这包括但不限于直接硬连线连接、光纤、红外和无线总线技术。在操作期间,程序152存储在存储器144中,并由处理器142执行。
46.应当理解,虽然在全功能计算机系统的语境中描述了该示例性实施例,但是本领域技术人员将认识到,本公开的机制能够分布(distributed)为具有一种或多种类型的非暂时性计算机可读信号承载介质的程序产品,该介质用于存储程序及其指令并执行其分布,例如承载程序并包含存储在其中的计算机指令的非暂时性计算机可读介质,所述计算机指令用于使计算机处理器(例如处理器142)执行和执行程序。这种程序产品可以采取多种形式,并且本公开同样适用,而不管用于执行分布的计算机可读信号承载介质的特定类型。信号承载介质的例子包括:可记录介质,例如软盘、硬盘、存储卡和光盘,以及传输介质,例如数字和模拟通信链路。应当理解,在某些实施例中也可以利用基于云的存储和/或其他技术。类似地,可以理解,控制器140的计算机系统也可以不同于图1所示的实施例,例如,控制器140的计算机系统可以联接到或者可以利用一个或多个远程计算机系统和/或其他控制系统。
47.图2提供了根据示例性实施例的图1的控制系统102的模块的功能框图。如图2所示,在各种实施例中,控制系统102包括图1的位置系统130(例如,gps)、图1的惯性测量传感器121和摄像头126以及图1的地图数据154(例如,存储在图1的存储器144中)。
48.如图1所示,在各种实施例中,来自位置系统130(例如gps)、惯性测量传感器121、摄像头126和地图数据154(以及,在各种实施例中,诸如来自图1的传感器阵列120的附加传感器的附加数据)的数据作为算法202的输入被提供,用于预测载具在各时间点(tk,t
k 1
,...,t
k p
)的操作和转换。
49.同样在各种实施例中,算法202根据以下等式利用贝叶斯(bayesian)滤波器:
[0050][0051]
其中p(xk|z
1:k
)是基于预测状态的状态更新的概率分布和基于贝叶斯估计器计算的测量似然。其他估计算法也可以用于此目的。
[0052]
同样在各种实施例中,算法202经由图1的处理器142执行,并且根据以下等式在各时间点生成预测干扰208:
[0053]
φ
k φ
k 1 φ
k 2
…
φ
k p (等式2),
[0054][0055]
θ
k θ
k 1 θ
k 2
…
θ
k p (等式4),以及
[0056][0057]
其中φk表示道路坡度角,θk表示道路坡度角,表示载具的期望偏航角速度(yaw rate),并且是期望的纵向加速度。
[0058]
同样在各种实施例中,经由图1的处理器144生成跟踪误差(ek)206。跟踪误差是载具轨迹与期望的载具轨迹之间的差异。
[0059]
如各个实施例中所描绘的,预测干扰208和跟踪误差206被提供用于模型预测控制(mpc),用于以补偿预测上的道路海拔干扰的方式来控制载具10。在各种实施例中,图1的处理器144使用自适应主动控制212在各时间点(tk,t
k 1
,...,t
k p
)沿着逐渐远离的地平线为载具提供用于模型预测控制的指令(例如,通过提供用于调节载具10的加速、制动和/或转向的指令)。
[0060]
图3是根据示例性实施例的用于相对于道路海拔转变控制载具的过程300的流程图。在各种实施例中,过程300可以结合图1的载具100以及图1和2的控制系统102来实现。图3的过程300也将在下面结合图4-9进一步讨论,图4-9示出了根据各种实施例的过程300的不同实施方式。
[0061]
如图3所示,该过程开始于步骤301。在一个实施例中,当载具驾驶或点火循环开始时,过程300开始,例如当驾驶员接近或进入载具100时,或者当驾驶员打开载具和/或其点火装置时(例如通过转动钥匙、接入钥匙链或启动按钮等)。在一个实施例中,过程300的步骤在载具运行期间连续执行。
[0062]
为载具生成用户输入(步骤302)。在各种实施例中,用户输入通过图1的输入传感器122从载具100的驾驶员或其他用户获得。在各种实施例中,用户输入包括针对当前载具驾驶的、载具100的行驶目的地。此外,在某些实施例中,用户输入还可以包括与载具驾驶相关的一个或多个其他用户请求,例如关于载具驾驶的路线或路线类型的偏好、对载具100的一个或多个自动化特征的超控等等。在某些实施例中,用户输入由载具100的驾驶员或其他用户经由载具100的一个或多个按钮、开关、旋钮、触摸屏、麦克风和/或其他设备输入,其例如作为图1的位置系统130的一部分(例如,在某些实施例中,作为导航系统和/或gps系统等的一部分)。在各种实施例中,步骤302的用户输入被提供给图1的处理器142,用于处理、并用于确定和实现过程300的剩余步骤,例如如下所述。
[0063]
同样在某些实施例中,获得额外的传感器数据(步骤304)。在各种实施例中,经由图1的传感器阵列120的一个或多个惯性测量传感器121、转向传感器123、扭矩传感器124、速度传感器125、摄像头126和/或其他传感器,获得关于载具100和/或载具100所行驶道路或路径的传感器数据。在各种实施例中,步骤304的传感器数据被提供给图1的处理器142用于处理、并用于确定和实现过程300的剩余步骤,例如如下所述。
[0064]
获得载具的位置数据(步骤306)。在各种实施例中,通过图1的位置系统130(例如,gps)获得与载具100的位置相关的位置数据。在某些实施例中,这种位置信息是使用来自一个或多个卫星的信息获得的,并且包括载具100的纵向和横向坐标。在各种实施例中,步骤
306的位置数据被提供给图1的处理器142用于处理、并用于确定和实现过程300的剩余步骤,例如如下所述。
[0065]
还获得载具驾驶的地图数据(步骤308)。在各种实施例中,获得载具100所行驶的道路或路径的车道水平地图数据。在各种实施例中,基于步骤306的位置数据,从存储在图1的存储器144中的对应于载具100行驶的车道和道路或路径的一个或多个地图数据154中检索所述地图数据。
[0066]
获得摄像头数据(步骤310)。在各种实施例中,获取载具100行驶的道路或路径的摄像头数据,并且包括关于道路倾斜和坡度角的信息。在各种实施例中,摄像头数据是相对于载具100行驶的当前车道获得的。在某些实施例中,还获得关于相邻和/或其他附近车道的摄像头数据。在某些实施例中,在过程300的当前和先前迭代中,从步骤308的地图数据、以及从获取自步骤304的传感器数据的摄像头图像获得所述摄像头数据,其包括关于道路倾斜角和坡度角的信息。
[0067]
为载具计划任务(步骤312)。在各种实施例中,根据步骤302的用户输入,计划载具100的任务(或行进路径),以便到达当前载具驾驶的目的地。在各种实施例中,任务由图1的处理器142确定为包括道路和道路内的行驶车道,以便到达用户选择的目的地。在某些实施例中,步骤306的位置数据、步骤308的地图数据和/或步骤310的摄像头数据也由选择任务的处理器142使用。
[0068]
此外,在各种实施例中,生成坡度分布(步骤314)。在各种实施例中,由图1的处理器142相对于沿与步骤312的任务相关联的道路或路径的逐渐远离的预测地平线的道路和道路或路径的坡度角度来生成坡度分布。在各种实施例中,使用步骤308的地图数据和步骤310的摄像头数据以这种方式生成坡度分布。
[0069]
下面结合图4和图5所示的示例性实现来描述步骤314的坡度分布的生成。
[0070]
参考图4,根据示例性实施例,载具100被描绘为沿着具有多个车道的道路400行驶。在各种实施例中,载具100正沿着对应于图4中用星表示的点402的路径(或任务)行进,点402延伸穿过道路400的多个车道。
[0071]
同样如图4所示,在沿着道路400的不同车道和路段获得各种坡度和倾斜角数据点(例如,从摄像头数据和地图数据)。具体地,在所示实施例中,坡度和倾斜角数据点包括:(i)沿着载具100当前(或最初)行驶的道路400的第一车道的第一坡度和倾斜角数据点410;(ii)对应于道路400的第二车道(例如,与载具100当前行驶的道路400的车道紧邻的车道)的第二坡度和倾斜角数据点411;以及(iii)沿着道路400的第三车道(例如,与载具100当前行驶的车道相距两个车道的车道)的第三坡度和倾斜角数据点412。根据一个示例性实施例,图4描绘了一个示例性实施方式,其中载具100正在执行(或将要执行)跨道路400的三条车道的车道转换操作。
[0072]
参考图5,根据示例性实施例,图4的示例性植入以位于图1的道路400上的载具100的特写视图来示出。如图5所示,载具100的每个行驶点402包括道路400的相关道路坡度角φx502。同样如图5所示,在各种实施例中:(i)每个第一数据点410包括道路400的第一车道的相关道路坡度角φ0x510;(ii)每个第二数据点411包括道路400的第二车道的相关道路坡度角φ1x511;以及(iii)每个第三数据点412包括道路400的第三车道的相关道路坡度角φ2x512。
[0073]
同样如各个实施例中所描绘的,道路坡度角值是相对于坐标系来确定的,该坐标系具有与载具100的当前行驶方向相对应的x轴线520和与其垂直的y轴线530。
[0074]
此外,在各种实施例中,道路坡度角根据以下等式来确定(根据说明示例性数学函数的非限制性模型的示例可用于实现本技术中公开的方法):
[0075]
y(x)=d1x d2x2 d3x3 d4x4 d5x
5 (等式6),
[0076]
yi(x)=c0 c1x c2x2 c3x
3 (等式7),
[0077][0078]
for 0≤xk≤x
p (等式9),
[0079][0080]
以及
[0081][0082]
其中φ表示道路坡度角,并且y是载具在前方距离x处相对于当前位置的横向偏移,c0,...,c3是每个车道i的车道中心的多项式系数,d1,..,d5是要在多个车道上确定的期望轨迹或计划任务分布的多项式系数。
[0083]
同样在各种实施例中,类似于图5的示例,载具100的每个行驶点402类似地包括道路400的相关道路倾斜角θ(x)502。同样如图5所示,在各种实施例中:(i)每个第一数据点410还包括道路400的第一车道的相关道路倾斜角θ0(x);(ii)每个第二数据点411包括道路400的第二车道的相关道路倾斜角θ1(x);以及(iii)第三数据点412中的每一个包括道路400的第三车道的相关道路倾斜角θ2(x),其由图1的处理器142以类似于上文结合公式6-11针对道路坡度角φ所述的方式来确定。
[0084]
返回参考图3,在各种实施例中,转换坡度分布(步骤316)。具体地,在各种实施例中,图1的处理器142将步骤314的道路坡度角度分布从道路坐标系转换为载具坐标系。下面根据图6的示例性实现描述步骤316的转换。
[0085]
参考图6,载具100被描绘位于具有道路路径602的道路400上。同样如图6所示,载具100沿着期望的路径604行驶。根据示例性实施例,图6中还示出了期望路径604相对于道路路径602的期望偏航角e
2d 606。
[0086]
继续参考图6,在各种实施例中,步骤316的转换包括根据以下等式从道路坐标(例如,道路路径602)到期望路径604的旋转:
[0087]
φ=sin(e
2d
)θ cos(e
2d
)φ (等式12)和
[0088]
θ=cos(e
2d
)θ-sin(e
2d
)φ (等式13),
[0089]
其中φ代表道路坡度角,θ代表道路倾斜角,而e
2d
代表期望路径604相对于道路路径602的图6的期望偏航角606。
[0090]
再次参考图3,在各种实施例中,步骤314和316的转换的坡度分布用于控制载具,都用于横向控制(步骤318和320)。在各种实施例中,图1的处理器142利用转换后的坡度分布向各种载具部件(例如制动系统106、转向系统108和/或驱动系统110)提供调整和/或控制指令,以基于在道路的逐渐远离的预测地平线上的投影坡度角和倾斜角来调整载具100
的横向和纵向控制,例如,当载具100沿着具有可变坡度角和/或道路倾斜角的道路的不同部分行驶时,提供可能更平滑的过渡。
[0091]
首先,在步骤318期间,在示例性实施例中,使用横向轨迹跟踪模型结合以下等式来调节载具100的横向控制:
[0092][0093][0094][0095][0096][0097][0098][0099][0100]
[0101][0102]
φ(xk)=[φ
k φ
k 1 φ
k 2
…
φ
k p
] (等式24),以及
[0103][0104]
其中:(i)e1表示相对于道路的横向位置误差;(ii)e2表示相对于道路的偏航角误差;(iii)δ代表前轮转向角;(iv)表示考虑曲率的预测地平线上的期望偏航率点云;以及(v)φ
k i
表示预测地平线上的道路坡度角点云,其中(i)ψ的值在图7中表示,以及(ii)φ的值在图8中表示(结合图5的x轴线520和y轴线530)。c
af
,c
ar
是前、后转弯系数,m是载具质量,iz是转动惯量,lf,lr分别是重心到前后轴的距离,δ是载具道路车轮角度。
[0105]
继续参考步骤318,在各种实施例中,横向控制基于多个输入的处理,包括:(i)来自任务/路径计划器的期望轨迹y(x)=f(x);(ii)载具路径曲率(ρ);(iii)载具速度(v
x
,vy);(iv)惯性测量单元(imu)数据(a
x
,ay,ωz);(v)驾驶员施加的扭矩(τ
driver
);(vi)转向角(δ);(vii)授权;(viii)驾驶员超控;(ix)安全关键斜坡下降请求;(x)水平坡度角φ;和(xi)地平线期望曲率φ。同样在各种实施例中,这些各种输入(例如,通过图1的传感器阵列120获得的)被图1的处理器142用于基于以下等式生成用于载具100的横向控制的转向命令:
[0106][0107]
使得:
[0108]
和
[0109][0110]
其中:(i)ae b1δ
t
是基于模型的误差动态补偿;(ii)是期望曲率对误差动力学的影响;(iii)b3sin(φ)是坡度角(iv)的影响,表示误差动态中的不确定性(待估计和补偿),以及(v)α1e α2δ≤c,表示不确定性实现和鲁棒控制的约束以及性能、感觉、舒适性和安全性约束。
[0111]
此外,在步骤320期间,在示例性实施例中,基于由图1的传感器阵列120提供的传感器数据输入,结合以下等式,使用用于纵向补偿的纵向轨迹跟踪模型(经由由图1的处理器142提供的指令)来调整载具100的纵向控制:
[0112][0113]
[0114][0115][0116][0117][0118][0119][0120]
gθ(xk)=gcos(φ)[θ
k θ
k 1 θ
k 2
…
θ
k p
] (等式37,以及
[0121][0122]
其中:(i)t
b/e
代表牵引/制动扭矩;(ii)a
x
代表纵向加速度;(ii)v
x
代表纵向速度;(iii)表示期望的纵向速度;(iv)表示期望的纵向加速度;和(v)θ
k i
表示预测地平线上的道路倾斜角点云,其中道路倾斜角θ的值在图9中表示。在各种实施例中,类似于等式26、27和28,可以生成用于载具纵向控制的加速和减速命令。
[0123]
在各种实施例中,该方法然后在步骤322终止。
[0124]
因此,提供了用于在道路海拔转变期间控制载具的方法、系统和载具。在各种实施例中,摄像头数据和地图数据被用于沿着载具行驶的道路沿着逐渐远离的预测地平线生成道路坡度角和道路倾斜角分布。同样在各种实施例中,道路坡度角和道路倾斜角分布的转换版本被用于对载具进行横向和纵向控制,例如帮助在具有不同道路坡度和/或道路倾斜角的道路路段之间平滑过渡。
[0125]
应当理解,系统、载具和方法可以不同于附图中描绘的和这里描述的那些。例如,图1的载具100、图1和图2的控制系统102和/或图1和图2的其部件可以在不同的实施例中变化。类似地,可以理解,过程300的步骤可以不同于图3中描述的步骤,和/或过程300的各个步骤可以同时发生和/或以不同于图3中描述的顺序发生。类似地,应当理解,图4-9的各种实施方式在各种实施例中也可以不同。
[0126]
虽然在前面的详细描述中已经呈现了至少一个示例性实施例,但是应当理解,存
在大量的变化。还应当理解,一个或多个示例性实施例仅是示例,并不旨在以任何方式限制本公开的范围、适用性或配置。相反,前述详细描述将为本领域技术人员提供用于实现一个或多个示例性实施例的便利路线图。应当理解,在不脱离所附权利要求及其法律等同物中阐述的本公开的范围的情况下,可以对元件的功能和布置进行各种改变。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
