乘客输送机以及杀菌方法
1.本技术以日本专利申请2021-030535(申请日:2021年2月26日)为基础,享受该申请的优先权。本技术通过参照该申请而包含该申请的全部内容。
技术领域
2.本发明的实施方式涉及乘客输送机以及杀菌方法。
背景技术:
3.以往,在自动扶梯、自动人行道等乘客输送机中,有的会具备对乘降板上的物体进行检测的物体检测装置。
4.在最近的新冠灾害中,对于作为公共交通设施之一的乘客输送机,由于利用者接触扶手带,因此要求提高针对新冠病毒的安全性。因此,在具备物体检测装置的乘客输送机中,如果能够对扶手带的表面进行杀菌则较有益。
技术实现要素:
5.实施方式的乘客输送机具备一对乘降板、多个梯级、一对扶手带、物体检测装置以及杀菌装置。上述一对乘降板相互分离配置。上述多个梯级被连结为环状,在上述一对乘降板之间行驶。上述一对扶手带相对于上述多个梯级设置在上述梯级的宽度方向的两侧,与上述梯级同步地行驶。上述物体检测装置配置在上述乘降板上,对上述乘降板上的物体进行检测。上述杀菌装置内置于上述物体检测装置,向上述扶手带的表面照射紫外线。
6.根据上述构成的乘客输送机,能够对扶手带的表面进行杀菌。
附图说明
7.图1是表示第1实施方式的乘客输送机的构成的立体图。
8.图2是表示第1实施方式的乘客输送机的构成的截面图。
9.图3是表示第1实施方式的乘客输送机中的包括物体检测装置以及杀菌装置的部分的截面图。
10.图4是表示第1实施方式的乘客输送机中的扶手带的一部分的仰视图。
11.图5是表示第2实施方式的乘客输送机的构成的立体图。
12.图6是表示第3实施方式的乘客输送机的控制装置执行的杀菌装置控制处理的流程的流程图。
13.图7是表示第5实施方式的乘客输送机的控制装置执行的杀菌装置控制处理的流程的流程图。
具体实施方式
14.以下,参照附图对实施方式进行详细说明。另外,本发明不被该实施方式限定。另外,在以下的多个实施方式中包括相同的构成要素。对这些相同的构成要素赋予共同的符
号并且省略重复的说明。此外,附图是示意性的图,各要素的尺寸关系、各要素的比例等有时与现实不同。此外,在附图彼此之间,有时包括彼此的尺寸关系、比例不同的部分。
15.《第1实施方式》
16.图1是表示本实施方式的乘客输送机1的构成的立体图。图2是表示第1实施方式的乘客输送机1的构成的截面图。
17.乘客输送机1是在两个场所之间输送乘客p的输送机。在本实施方式中,作为乘客输送机1的一例,对跨在建造物的上层与下层之间而倾斜地安装的自动扶梯进行说明。另外,乘客输送机1也可以是平坦地设置在建造物的相同层中的自动人行道。
18.乘客输送机1具备桁架2(构造框架)、多个梯级3、左右一对栏杆4、上下一对乘降板5、驱动装置6以及物体检测装置20。
19.桁架2的一端部配置在下层,另一端部配置在上层,对乘客输送机1的倾斜角进行规定。桁架2是框架。
20.上下一对乘降板5构成处于下层以及上层的乘客输送机1的乘降口的地板面。上下一对乘降板5配置在桁架2的一端部以及另一端部。
21.梯级3是在建造物的下层与上层之间循环移动的构造体。乘客p搭乘在梯级3上。在图1的构成中,桁架2具备将梯级3保持为能够移动的梯级轨道(省略图示)。
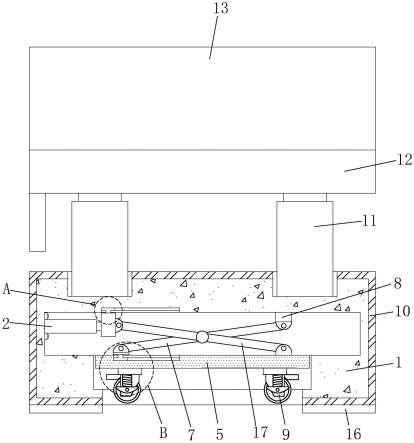
22.如图2所示,驱动装置6配置在桁架2内。驱动装置6是用于驱动梯级3的装置,驱动装置6具有驱动轮10、从动轮11、减速器9、驱动链条12、梯级链条13以及马达8。梯级链条13在驱动轮10与从动轮11之间连结为环状。如图1所示,在梯级链条13上安装有多个梯级3。通过从马达8经由减速器9的链轮14、以及驱动链条12而向驱动轮10供给的动力,梯级链条13在驱动轮10与从动轮11之间环绕移动,与此相伴随,多个梯级3在驱动轮10与从动轮11之间循环行驶(移动)。在本实施方式中,梯级3在从下层向上层输送乘客p的方向上移动。此外,对马达8设置有扭矩计测器103。扭矩计测器103计测对马达8施加的负载即对马达8的旋转轴施加的扭矩。
23.栏杆4从连结有多个的梯级3的宽度方向的两侧立起设置。栏杆4设置有一对,且设置在连结有多个的梯级3的旁边。栏杆4分别沿着连结有多个的梯级3的长边方向即桁架2的长边方向呈直线状延伸。栏杆4具有裙式护板17、侧板18以及扶手带19。侧板18从裙式护板17立起设置且遍及下层与上层地设置。扶手带19在侧板18的外缘与梯级3同步地朝与梯级3相同的方向循环行驶。乘客p例如在用手握住扶手带19的状态即用手接触扶手带19的状态下搭乘在梯级3上。
24.裙式护板17设置在梯级3的旁边,且遍及下层与上层地设置。裙式护板17相对于梯级3配置在梯级3的宽度方向的两侧。裙式护板17具有主体17a以及一对出入部17b。主体17a沿着桁架2倾斜地跨在上层与下层之间。一对出入部17b与主体17a的一端部以及另一端部连接,并从主体17a突出。在裙式护板17内收纳有扶手带19的靠梯级3侧的部分。扶手带19经由出入部17b相对于裙式护板17出入。即,在出入部17b设置有供扶手带19插通的出入口17c。出入口17c是裙式护板17上的扶手带19的出入口(入口或者出口)。
25.在裙式护板17设置有物体接近检测传感器102。作为一例,物体接近检测传感器102设置于出入部17b。物体接近检测传感器102能够检测相对于出入部17b处于规定距离内的物体。即,物体接近检测传感器102能够检测相对于出入部17b接近到规定距离内的物体。
作为一例,物体接近检测传感器102为激光传感器。物体接近检测传感器102朝向乘降板5的与梯级3相反一侧射出激光。物体接近检测传感器102能够接收由物体反射后的激光(反射光)。物体接近检测传感器102通过接收反射光来检测物体。当物体接近检测传感器102检测到物体时,警告装置(未图示)发出声音、光等的警报。由此,能够抑制乘客p的手指等进入到出入部17b内。另外,物体接近检测传感器102并不限定于激光传感器。例如,物体接近检测传感器102也可以是超声波传感器、光电传感器、人体传感器(红外线传感器)等。
26.物体检测装置20配置在乘降板5上,检测乘降板5上的物体。物体是乘客p、乘客p的行李等。在本实施方式中,作为一例,在下层的乘降板5上配置有一对物体检测装置20。即,物体检测装置20配置在与扶手带19驶出的出入部17b对应的乘降板5上,且位于出入部17b的下方。一对物体检测装置20是设置在一对栏杆4中的一方的栏杆4侧的物体检测装置20a、以及设置在一对栏杆4中的另一方的栏杆4侧的物体检测装置20b。
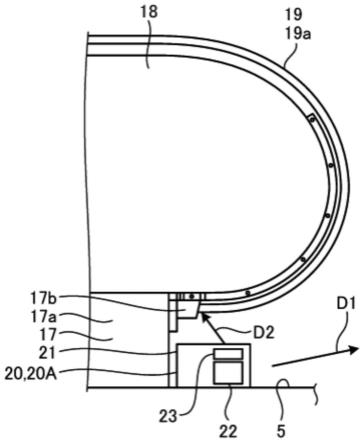
27.图3是表示第1实施方式的乘客输送机1中的包括物体检测装置20以及杀菌装置23的部分的截面图。如图3所示,物体检测装置20具有设置在乘降板5上的壳体21以及收纳于壳体21的光传感器元件22。光传感器元件22可以为一个,也可以为多个。光传感器元件22例如射出激光。即,物体检测装置20是激光传感器。作为一例,光传感器元件22在乘降板5上向从梯级3侧朝向与梯级3相反侧的方向(图3中的箭头d1的方向)射出激光。光传感器元件22能够接收由乘降板5上的物体反射后的激光(反射光)。壳体21中供激光透射的部分由允许激光透射的材料(透光性树脂)构成。物体检测装置20通过由光传感器元件22接收反射光来检测物体。这种构成的物体检测装置20能够检测出有无将要乘上梯级3的乘客p、跌倒在乘降板5上的乘客p、放置在乘降板5上的行李等。另外,该物体检测装置20的检测对象(使用用途)并不限定于上述。此外,物体检测装置20并不限定于激光传感器。例如,物体检测装置20也可以是超声波传感器、光电传感器、人体传感器(红外线传感器)等。
28.此外,物体检测装置20内置有杀菌装置23。具体而言,杀菌装置23收纳于壳体21。杀菌装置23相对于从出入部17b突出的扶手带19中的朝向下方的表面19a(平坦面)配置在下侧。杀菌装置23与表面19a分离。
29.杀菌装置23射出紫外线。杀菌装置23从下侧朝扶手带19的表面19a照射紫外线,对表面19a进行杀菌。从杀菌装置23射出的紫外线的光轴ax以如下方式延伸:朝向扶手带19的表面19a且朝向出入口17c方向(出入口17c侧),从乘降板5的与梯级3相反侧朝向梯级3侧。即,杀菌装置23的紫外线的射出方向与物体检测装置20的激光的射出方向不同。杀菌装置23由发出紫外线的一个或者多个紫外线灯构成。壳体21中供紫外线透射的部分由允许紫外线透射的材料(透光性树脂)构成。
30.图4是表示第1实施方式的乘客输送机1中的扶手带19的一部分的仰视图。从杀菌装置23射出的紫外线的焦点被设定为对准扶手带19的表面19a。紫外线的照射区域可以是遍及扶手带19的宽度方向整体的第1区域r1,也可以是扶手带19的宽度方向的一部分的区域r2、r3。
31.图2所示的控制装置50对乘客输送机1的各部分进行控制。控制装置50是微型计算机。控制装置50经由布线连接有物体检测装置20、杀菌装置23、物体接近检测传感器102以及扭矩计测器103。物体检测装置20、杀菌装置23、物体接近检测传感器102以及扭矩计测器103的检测结果经由布线输入至控制装置50。此处,将物体检测装置20以及杀菌装置23与控
制装置50进行连接的布线,从乘降板5的下表面在桁架2内通过而与控制装置50连接。通过该布线进行电力、控制信号的交换。
32.控制装置50对杀菌装置23进行控制,以便在梯级3的行驶中,与物体检测装置20的检测结果无关而始终照射紫外线。
33.在本实施方式中,乘客输送机1执行以下的杀菌方法。即,杀菌装置23朝向扶手带19的表面19a射出紫外线(射出工序),扶手带19的表面19a接受从杀菌装置23射出的紫外线(接受工序)。由此,扶手带19的表面19a被紫外线杀菌。
34.如上所述,在本实施方式中,具备一对乘降板5、多个梯级3、一对扶手带19、物体检测装置20以及杀菌装置23。一对乘降板5相互分离地配置。多个梯级3连结为环状,在一对乘降板5之间行驶。一对扶手带19相对于多个梯级3设置在梯级3的宽度方向的两侧,与梯级3同步地行驶。物体检测装置20设置在乘降板5上,对乘降板5上的物体进行检测。杀菌装置23内置于物体检测装置20,向扶手带19的表面19a照射紫外线。
35.根据这种构成,在具备物体检测装置20的乘客输送机1中,能够通过由杀菌装置23照射的紫外线对扶手带19的表面19a进行杀菌。此外,根据上述构成,杀菌装置23内置于物体检测装置20,因此无需在乘降板5上确保仅用于放置杀菌装置23的空间。因此,与将物体检测装置20与杀菌装置23分别设置的情况相比,容易减小它们的设置空间。此外,根据上述构成,杀菌装置23内置于物体检测装置20,因此与杀菌装置23与物体检测装置20分体设置的构成相比,容易抑制设计性降低。此外,根据上述构成,杀菌装置23内置于物体检测装置20,因此杀菌装置23不会与乘客p、乘客p的所持物直接碰撞。因此,容易确保乘客p的安全。此外,如此,由于杀菌装置23不会与乘客p、乘客p的所持物直接碰撞,因此难以产生杀菌装置23的位置偏移,扶手带19的紫外线的照射位置难以偏移。因而,能够得到紫外线对扶手带19的较高的杀菌效果。
36.此处,上述构成的杀菌装置23并不限定于在新设置乘客输送机1时设置。例如,杀菌装置23也可以后安装于已设的乘客输送机1的物体检测装置20。如此,由于能够在已设的物体检测装置20中后安装杀菌装置23,因此能够在短工期内进行杀菌装置23的设置施工。因此,能够缩短与设置施工相伴随的乘客p无法利用乘客输送机1的时间。
37.此外,在本实施方式中,杀菌装置23收纳在物体检测装置20的壳体21内。
38.根据这种构成,无需设置杀菌装置23专用的壳体,因此与将杀菌装置23与物体检测装置20分体设置的构成相比,容易减小杀菌装置23以及物体检测装置20整体的大小。
39.此外,在本实施方式中,乘客输送机1具备一对裙式护板17。一对裙式护板17具有与一对乘降板5对应的一对出入部17b,相对于多个梯级3设置在梯级3的宽度方向的两侧。物体检测装置20以及杀菌装置23配置在与扶手带19驶出的出入部17b对应的乘降板5上。
40.根据这种构成,能够在乘客p接触扶手带19紧前对扶手带19进行杀菌。
41.此外,在本实施方式中,控制装置50对杀菌装置23进行控制,以便在梯级3的行驶中始终照射紫外线。
42.根据这种构成,在梯级3的行驶中始终对扶手带19的表面19a照射紫外线,因此能够抑制病毒等对乘客p的影响。
43.另外,在本实施方式中,示出了对于一对扶手带19的双方设置杀菌装置23的例子,但并不限定于此。例如,也可以仅对于一对扶手带19中的一方设置杀菌装置23。在该情况
下,另一方的扶手带19例如也可以由作业人员进行杀菌。如此,即使在作业人员对另一方的扶手带19进行杀菌的情况下,由于杀菌装置23进行一方的扶手带19的杀菌,因此与作业人员对双方的扶手带19进行杀菌的情况相比,作业人员的作业量也是较少即可。
44.此外,在本实施方式中,从杀菌装置23射出的紫外线的光轴ax,以朝向表面19a且朝向入口17c方向、从乘降板5的与梯级3相反侧朝向梯级3侧的方式延伸。
45.根据这种构成,能够抑制从杀菌装置23射出的紫外线照射到乘降板5上的乘客p。因此,能够提高针对乘客p的安全性。
46.《第2实施方式》
47.图5是表示第2实施方式的乘客输送机1的构成的立体图。
48.本实施方式的物体检测装置20以及杀菌装置23的个数与第1实施方式不同。在本实施方式中,在下层的乘降板5以及上层的乘降板5上分别配置有一对物体检测装置20。即,设置有4个物体检测装置20。并且,所有物体检测装置20都分别内置有杀菌装置23。即,物体检测装置20以及杀菌装置23配置在与扶手带19驶出的出入部17b对应的乘降板5上以及与扶手带19进入的出入部17b对应的乘降板5上。多个(作为一例为4个)物体检测装置20是下层的一对物体检测装置20a、20b以及上层的一对物体检测装置20c、20d。物体检测装置20c设置于上层的一对栏杆4中的一方的栏杆4侧,物体检测装置20d设置于上层的一对栏杆4中的另一方的栏杆4侧。
49.在本实施方式中,控制装置50对所有杀菌装置23进行控制,以便在梯级3的行驶中,与物体检测装置20的检测结果无关,所有杀菌装置23都始终照射紫外线。
50.在以上的构成中,在下层的乘降板5以及上层的乘降板5上分别配置有一对杀菌装置23,多个(作为一例为2个)杀菌装置23对一个扶手带19照射紫外线。因此,与一个杀菌装置23对一个扶手带19照射紫外线的构成相比,能够提高扶手带19的杀菌效果。
51.另外,杀菌装置23的设置场所以及个数并不限定于上述。例如,也可以将向一方的扶手带19照射紫外线的杀菌装置23仅设置在上层,将向另一方的扶手带19照射紫外线的杀菌装置23仅设置在下层。即,将向一方的扶手带19照射紫外线的杀菌装置23仅设置在与扶手带19驶出的出入部17b对应的乘降板5上,将向另一方的扶手带19照射紫外线的杀菌装置23仅设置在与扶手带19进入的出入部17b对应的乘降板5上。这些杀菌装置23的配置可以根据乘客输送机1的设置环境来设定。
52.此外,在本实施方式中,示出了相对于一个扶手带19设置多个(作为一例为2个)杀菌装置23,该多个杀菌装置23全部在梯级3的行驶中进行动作的例子,但并不限定于此。例如,在相对于一个扶手带19设置多个(作为一例为2个)杀菌装置23的构成中,也可以针对每个杀菌装置23设定是否使该多个杀菌装置23动作。例如,在乘客输送机1输送的每单位时间的乘客数小于阈值的情况下,也可以仅使多个杀菌装置23中的一部分动作,而使其他杀菌装置23停止。并且,在乘客输送机1输送的每单位时间的乘客数为阈值以上的情况下,也可以使所有杀菌装置23都动作。乘客输送机1输送的每单位时间的乘客数,例如可以基于物体检测装置20的检测结果来计算,也可以基于对乘客输送机1进行摄像的摄像装置(未图示)的摄像结果来计算。根据这种构成,在乘客p较少的情况下使一部分杀菌装置23停止,因此能够延长杀菌装置23的寿命。此外,在乘客p较多的情况下,能够提高对于扶手带19的表面19a的杀菌力。
53.此外,在本实施方式中,示出了控制装置50对杀菌装置23进行控制,以便在梯级3的行驶中,与物体检测装置20的检测结果无关,所有杀菌装置23都始终照射紫外线的例子,但并不限定于此。例如,控制装置50也可以为,在物体进入物体检测装置20的规定范围的情况下,以使内置于该物体检测装置20的杀菌装置23停止紫外线的照射的方式,对该杀菌装置23进行控制。由此,例如,在人处于恶作剧的目的而接近2个物体检测装置20中的一方的物体检测装置20的情况下,能够使内置于该物体检测装置20的杀菌装置23的动作停止。此时,另一方的杀菌装置23进行动作。因此,能够提高乘客p以及需要进行恶作剧的人的双方的安全性。
54.《第3实施方式》
55.图6是表示第3实施方式的乘客输送机1的控制装置50执行的杀菌装置控制处理的流程的流程图。
56.在本实施方式中,控制装置50进行的处理与第2实施方式不同。参照图6对本实施方式的控制装置50执行的杀菌装置控制处理进行说明。
57.如图6所示,控制装置50判定马达8的负载是否为阈值以下(s11)。马达8的负载是对马达8施加的扭矩,控制装置50从扭矩计测器103取得对马达8施加的扭矩。所输送的乘客p越多,马达8的负载越大。即,可以说马达8的负载表示所输送的乘客p的量。另外,马达8的负载的检测也可以是对马达8的电流进行测定而检测马达8的负载的方法。
58.控制装置50在判定为马达8的负载为阈值以下的情况下(s11:是),将杀菌装置23的杀菌力设定为小(s12)。作为一例,控制装置50将各杀菌装置23的紫外线的射出量设为规定量以下。作为另一例,控制装置50仅使设置于一个扶手带19的多个(作为一例为2个)杀菌装置23的一部分(作为一例为1个)动作,而使其他杀菌装置23停止。作为又一例,控制装置50使所有杀菌装置23停止。由此,提高杀菌装置23的寿命。
59.此外,控制装置50在判定为马达8的负载不为阈值以下、即马达8的负载超过阈值的情况下(s11:否),将杀菌装置23的杀菌力设定为大(s13)。详细来说,控制装置50为,在对马达8作用有规定以上的负载的情况下,以增加对扶手带19的表面19a照射的紫外线量的方式对杀菌装置23进行控制。作为一例,控制装置50将各杀菌装置23的紫外线的射出量(强度)设为超过规定量的量。作为另一例,控制装置50使设置于一个扶手带19的多个(作为一例为2个)杀菌装置23全部动作。作为又一例,控制装置50使杀菌装置23的运转台数比杀菌力被设定为小的情况增多。由此,能够增大针对扶手带19的表面19a的杀菌效果。
60.如上所述,在本实施方式中,控制装置50为,在对马达8作用有规定以上的负载的情况下,以增加对表面19a照射的紫外线量的方式对杀菌装置23进行控制。根据这种构成,能够根据马达8的负载即根据乘客p的量来调整杀菌装置23的杀菌力。
61.另外,控制装置50也可以为,在乘客输送机1处于低速待机运转状态的情况下,将杀菌装置23的杀菌力设定为小。即,在该情况下,控制装置50也可以将各杀菌装置23的紫外线的射出量设为规定量以下。此外,作为另一例,控制装置50仅使设置于一个扶手带19的多个(作为一例为2个)杀菌装置23的一部分(作为一例为1个)动作,而使其他杀菌装置23停止。此外,作为又一例,控制装置50也可以使所有杀菌装置23停止。进行这种处理的原因在于,在乘客输送机1处于低速待机运转状态的情况下,能够判断为没有乘客p。另外,低速待机运转状态是指梯级3的移动速度比输送乘客p的额定速度运转的情况下的梯级3的速度慢
的状态。控制装置50基于物体检测装置20的检测结果来进行额定速度运转与低速待机运转的切换。作为一例,控制装置50在物体检测装置20检测到物体(乘客p)的情况下进行额定速度运转,在物体检测装置20在规定时间内未检测到物体(乘客p)的情况下进行低速待机运转。上述处理能够如下述那样描述。控制装置50在低速待机运转时,以使对扶手带19的表面19a照射的紫外线量减少的方式对杀菌装置23进行控制。详细来说,控制装置50将杀菌装置23控制为,与额定速度运转时相比,在低速待机运转时,对扶手带19的表面19a照射的紫外线量减少。
62.《第4实施方式》
63.在本实施方式中,控制装置50进行的处理与第1以及第2实施方式不同。在本实施方式中,控制装置50在额定速度运转中,以使所有杀菌装置23都不照射紫外线的方式对杀菌装置23进行控制。另一方面,控制装置50在梯级3的停止中或者低速待机运转中,以使所有或者一部分杀菌装置23照射紫外线的方式对杀菌装置23进行控制。根据这种构成,例如,在乘客输送机1输送乘客p的情况下,杀菌装置23不照射紫外线,因此即使在乘客输送机1被设置于作为乘客p而儿童较多的场所的情况下,也能够提高针对儿童等乘客p的安全性。另外,上述处理能够如下述那样描述。控制装置50在额定速度运转时,以使对扶手带19的表面19a照射的紫外线量减少的方式对杀菌装置23进行控制。详细来说,控制装置50将杀菌装置23控制为,与低速待机运转时相比,在额定速度运转时,对扶手带19的表面19a照射的紫外线量减少。
64.《第5实施方式》
65.图7是表示第5实施方式的乘客输送机1的控制装置50执行的杀菌装置控制处理的流程的流程图。
66.在本实施方式中,控制装置50进行的处理与第2实施方式不同。参照图7对本实施方式的控制装置50执行的杀菌装置控制处理进行说明。
67.如图7所示,控制装置50判定乘客p是否接近了出入部17b(s21)。具体而言,控制装置50在物体接近检测传感器102检测到物体的情况下,判定为乘客p接近了出入部17b(s21:是),在物体接近检测传感器102未检测到物体的情况下,判定为乘客p未接近出入部17b(s21:否)。
68.控制装置50在判定为乘客p接近了出入部17b的情况下(s21:是),以停止(紧急停止)紫外线照射的方式对杀菌装置23进行控制(s22)。此时,控制装置50使多个杀菌装置23中的至少与该出入部17b对应的杀菌装置23停止。即,控制装置50可以仅使与该出入部17b对应的杀菌装置23停止,也可以使所有杀菌装置23停止。
69.根据这种构成,例如,在乘客p接近了出入部17b的情况下,与该出入部17b对应的杀菌装置23停止而不照射紫外线,因此能够提高针对接近了出入部17b的乘客p的安全性。
70.以上,对本发明的实施方式进行了说明,但这些实施方式是作为例子而提示的,并不意图对发明的范围进行限定。这些实施方式能够以其他各种方式加以实施,在不脱离发明的主旨的范围内能够进行各种省略、置换、变更。这些实施方式及其变形包含于发明的范围及主旨中,并且包含于专利请求范围所记载的发明和与其等同的范围中。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。