基于单测点多向数据融合的rv减速器故障诊断方法及系统
技术领域
1.本发明涉及一种基于单测点多向数据融合的rv减速器故障诊断方法及系统,属于旋转机械故障诊断技术领域。
背景技术:
2.rv减速器由于其结构紧凑复杂、工况时变、传递路径不确定,单个振动传感器获取到的数据无法全面的表征设备运行状态,采用多个振动传感器组合采集的方法在通道采集的同步性、不同通道对测点的信息表征上存在差异。
3.由于rv减速器内部结构复杂,工况时变,传统的信号处理的方法,如短时傅里叶变换(fourier transform,ft)、经验模态分解(empirical mode decomposition,emd)等方法难以有效挖掘故障特征,无法确定rv减速器的运行状态;基于经典的cnn框架的时频图像故障诊断取得了不错的结果,但其局限于不能处理一维加速度信号,且特征的提取依赖于网络自身的学习能力,缺乏rv故障诊断的先验知识。
技术实现要素:
4.本发明提供了一种基于单测点多向数据融合的rv减速器故障诊断方法及系统,通过单测点多向数据融合的方式实现了rv减速器故障诊断。
5.本发明的技术方案是:一种基于单测点多向数据融合的rv减速器故障诊断方法,step1:数据采集:利用三轴加速度传感器同步采集rv减速器三个方向上的加速度信号;
6.step2:数据融合:基于setp2采集到的三维加速度信号,使用能量加权方法对三维加速度信号进行数据融合,得到包含三维时序信息的一维融合数据;
7.step3:数据集划分:对基于step3方法得到的一维融合数据划分为训练数据集和测试数据集;
8.step4:网络模型构建:以经典的深度卷积模型为基础,通过修改经典的深度卷积模型的网络结构来构建用于rv减速器故障诊断的小波卷积能量池化网络模型;
9.step5:模型训练:使用训练数据集训练网络模型得到诊断模型;
10.step6:诊断验证:使用测试数据集验证诊断模型的正确性。
11.所述三轴加速度传感器安装在rv减速器外圈随机位置。
12.所述数据融合具体为:
13.设加速度传感器以设定的采样频率在采样时间t内采集rv减速器的s方向的加速度信号,获得s方向上离散的k个时间点的数据值x
s1
,x
s2
,
…
,x
sk
,根据离散的数据值,获得在时间t内该方向上的能量值xs;s=x,y,z;
14.确定各方向加速度信号的能量值系数λs;
15.将同一时刻三个方向上的数据进行融合,融合后第q个时间点的数据值xq=∑λs*x
sq
,获得融合后的一维数据;其中,q=1,2,
…
,k;x
sq
表示s方向上第q个时间点的数据值,xq表示三个方向融合后的第q个时间点的数据值。
16.所述能量值采用如下方式计算:
[0017][0018]
式中,x
si
表示s方向上第i个时间点的数据值。
[0019]
所述s方向能量值系数其中,x
x
,xy,xz分别表示x、y、z三个方向上的能量值。
[0020]
所述小波卷积能量池化网络模型的构建步骤如下:
[0021]
step4.1:采用一维cnn结构作为模型骨干,该模型共包含五层卷积层,三层全连接层,其排列构成为:conv1,conv2,conv3,conv4,conv5,full1,full2,full3;
[0022]
step4.2:模型的conv1层中的排列构成为:wavelet conv1,relu1,lppool1;其中,wavelet conv1表示小波卷积,其尺寸大小为[1,27,55],lppool1d表示能量池化,其尺寸为[16,1],步长为55;
[0023]
step4.3:模型的conv2层中的排列构成为:conv2,relu2,dropout2;其中,conv2尺寸大小为[27,27,55],dropout参数为0.5;
[0024]
step4.4:模型的conv3层中的排列构成为:conv3,relu3,maxpool2;其中,conv3尺寸大小为[27,27,55],maxpool2的尺寸为[16,1],步长为55;
[0025]
step4.5:模型的conv4层中的排列构成为:conv4,relu4,dropout4;其中,conv4尺寸大小为[27,27,55],dropout参数为0.5;
[0026]
step4.6:模型的conv5层中的排列构成为:conv5,relu5;其中,conv5尺寸大小为[27,27,55];
[0027]
step4.7:模型的full1层中的排列构成为:linear1,relu6;其中,linear1尺寸大小为[216,216];
[0028]
step4.8:模型的full2层中的排列构成为:linear2,relu7;其中,linear2尺寸大小为[216,64];
[0029]
step4.9:模型的full3层中的排列构成为:linear3,softmax;其中,linear3尺寸大小为[64,6]。
[0030]
本发明提供了一种基于单测点多向数据融合的rv减速器故障诊断系统,包括:
[0031]
数据采集模块,用于利用三轴加速度传感器同步采集rv减速器三个方向上的加速度信号;
[0032]
数据融合模块,用于基于数据采集模块采集到的三维加速度信号,使用能量加权方法对三维加速度信号进行数据融合,得到包含三维时序信息的一维融合数据;
[0033]
数据集划分模块,用于对基于数据融合模块得到的一维融合数据划分为训练数据集和测试数据集;
[0034]
网络模型构建模块,用于以经典的深度卷积模型为基础,通过修改经典的深度卷积模型的网络结构来构建用于rv减速器故障诊断的小波卷积能量池化网络模型;
[0035]
模型训练模块,用于使用训练数据集训练网络模型得到诊断模型;
[0036]
诊断验证模块,用于使用测试数据集验证诊断模型的正确性。
[0037]
本发明的有益效果是:本发明的优势在于对rv减速器传感器安装位置不做约束,仅需在rv减速器上随机选择测试位置,采集该位置三个方向振动信号,通过数据融合训练小波卷积能量池化网络建立诊断模型,就能有效实现rv减速器故障诊断。
附图说明
[0038]
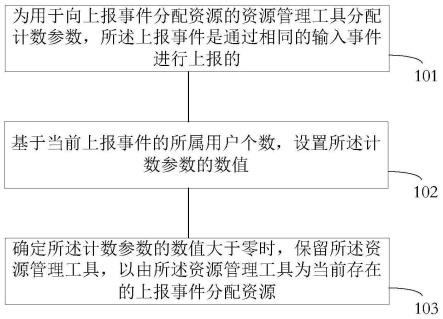
图1为本技术的系统流程图;
[0039]
图2为相同信号分析结果对比:(a)小波变换;(b)小波卷积;(c)经典卷积;
[0040]
图3为单通道 经典卷积模型、单通道 小波卷积能量池化模型、数据融合 小波卷积能量池化模型(本发明)训练效果对比图。。
具体实施方式
[0041]
下面结合附图和实施例,对发明作进一步的说明,但本发明的内容并不限于所述范围。
[0042]
实施例1:如图1-3所示,一种基于单测点多向数据融合的rv减速器故障诊断方法,所述方法包括:
[0043]
step1:数据采集:利用三轴加速度传感器同步采集rv减速器三个方向上的加速度信号;
[0044]
step2:数据融合:基于setp2采集到的三维加速度信号,使用能量加权方法对三维加速度信号进行数据融合,得到包含三维时序信息的一维融合数据;
[0045]
step3:数据集划分:对基于step3方法得到的一维融合数据划分为训练数据集和测试数据集;
[0046]
step4:网络模型构建:以经典的深度卷积模型为基础,通过修改经典的深度卷积模型的网络结构来构建用于rv减速器故障诊断的小波卷积能量池化网络模型;
[0047]
step5:模型训练:使用训练数据集训练网络模型得到诊断模型;
[0048]
step6:诊断验证:使用测试数据集验证诊断模型的正确性。
[0049]
可选地,单个测点安装具体为:三轴加速度传感器安装在rv减速器外圈随机位置;该安装方式对rv减速器振动传感器安装位置不做约束,一个三轴加速度传感器同步采集rv减速器三个方向上的加速度信号,全面采集各个方向上的信号,避免了由于信号传递路径不确定,传感器获取故障信息不全的问题,同时确保了信号的同步性。能量加权的方式对三轴加速度传感器采集到的三个通道数据进行数据融合,提取测点的三维时序振动信息,保证故障信息完整的同时极大的提高诊断模型训练的速度与准确率,解决了由于rv减速器结构复杂、信号传递路径不确定,单方向数据模型训练诊断准确率低,多方向数据模型数据量大,模型训练时间长诊断效果不佳的问题。
[0050]
可选地,所述数据融合具体为:
[0051]
设加速度传感器以设定的采样频率在采样时间t内采集rv减速器的s方向的加速度信号,获得s方向上离散的k个时间点的数据值x
s1
,x
s2
,
…
,x
sk
,根据离散的数据值,获得在时间t内该方向上的能量值xs;s=x,y,z;
[0052]
确定各方向加速度信号的能量值系数λs;
[0053]
将同一时刻三个方向上的数据进行融合,融合后第q个时间点的数据值xq=∑λs*
x
sq
,获得融合后的一维数据;其中,q=1,2,
…
,k;x
sq
表示s方向上第q个时间点的数据值,xq表示三个方向融合后的第q个时间点的数据值。
[0054]
可选地,所述能量值采用如下方式计算:
[0055][0056]
式中,x
si
表示s方向上第i个时间点的数据值。
[0057]
可选地,所述s方向能量值系数其中,x
x
,xy,xz分别表示x、y、z三个方向上的能量值。
[0058]
可选地,所述小波卷积能量池化网络模型的构建步骤如下:
[0059]
step4.1:采用一维cnn结构作为模型骨干,该模型共包含五层卷积层,三层全连接层,其排列构成为:conv1,conv2,conv3,conv4,conv5,full1,full2,full3;
[0060]
step4.2:模型的conv1层中的排列构成为:wavelet conv1,relu1,lppool1;其中,wavelet conv1表示小波卷积,其尺寸大小为[1,27,55],lppool1d表示能量池化,其尺寸为[16,1],步长为55;
[0061]
step4.3:模型的conv2层中的排列构成为:conv2,relu2,dropout2;其中,conv2尺寸大小为[27,27,55],dropout参数为0.5;
[0062]
step4.4:模型的conv3层中的排列构成为:conv3,relu3,maxpool2;其中,conv3尺寸大小为[27,27,55],maxpool2的尺寸为[16,1],步长为55;
[0063]
step4.5:模型的conv4层中的排列构成为:conv4,relu4,dropout4;其中,conv4尺寸大小为[27,27,55],dropout参数为0.5;
[0064]
step4.6:模型的conv5层中的排列构成为:conv5,relu5;其中,conv5尺寸大小为[27,27,55];
[0065]
step4.7:模型的full1层中的排列构成为:linear1,relu6;其中,linear1尺寸大小为[216,216];
[0066]
step4.8:模型的full2层中的排列构成为:linear2,relu7;其中,linear2尺寸大小为[216,64];
[0067]
step4.9:模型的full3层中的排列构成为:linear3,softmax;其中,linear3尺寸大小为[64,6]。
[0068]
具体而言,所述小波卷积是conv1层的wavelet conv1,wavelet conv1尺寸大小为[1,27,55],该尺寸的含义为wavelet conv1共有27个长度为55的一维卷积核对信号进行卷积,本技术中将整个频域划分为27个频带,每一个频带的中心频率对应一个小波函数,将27个小波函数的参数分别赋值给27个卷积核,每个卷积核与信号进行卷积就得到对应频带的频域信息,从而将时域信号转换至频域分析,使小波卷积能量池化网络能从整个频域空间挖掘rv减速器故障信息,更高效的识别旋转设备状态;与此同时第一层卷积核参数可以允许梯度更新学习,能自适应调整小波基参数,从而使小波卷积能量池化网络能自适应地提取rv减速器振动信号的频带信息,实现了从端到端的自适应诊断模式,无需数据预处理,提升了网络在复杂工况的rv减速器信号中提取故障特征实现故障诊断的能力;本技术将小波
卷积的参数直接赋值给第一层的卷积核,信号与小波卷积就得到了信号的频域信息,通过小波分析确定了网络数据挖掘的方向,后续的网络结构将会进一步在wavelet conv1获得的频带信息上进一步进行特征挖掘,避免了传统随机卷积核特征提取的不确定性(比如避免传统的卷积核,初始参数是随机赋值带来的不确性;避免了和信号的卷积得到的结果的不确定性),提高了rv故障特征挖掘的效率。所述能量池化是conv1层的lppool1d,均方根值是描述信号能量的统计特征指标,在判别设备运转状态是否正常、诊断设备零部件磨损等故障中具有稳定性、重复性好的特点。本技术在lppool1d的norm_type参数上取2,其作用等价于有效值,wavelet conv1获得频带信息,而lppool1d进一步在wavelet conv1中获取的每个频带能量进行统计,从而实现网络在信号的频带能量中挖掘rv故障特征,提升网络诊断的准确率。
[0069]
从图2(c)中可知,在整个频域上随机卷积核的分析结果杂乱无章,数据特征分布无规律、可解释性差,不利于知识的迁移;图2(a)中能量集中的频段与图(b)中小波卷积的结果保持一致,这证明了将小波变换作用于小波卷积能够有效地分析振动信号的频域信息。
[0070]
模型训练,使用tensorflow的pd.read_csv模块将一维融合数据集导入网络中;调用sklearn.model_selection模块中的stratifiedshufflesplit()函数对数据集划分成为训练数据集和测试数据集。其中训练数据集占整体数据集的80%,测试数据集占整体数据集的20%,经过实验验证在此划分比例下,模型的训练效果较好。
[0071]
进一步地设置初始学习率为0.001,衰减率为0.99;训练数据长度为4096;训练过程采用mini_batch学习,大小设置为128;当测试集精度达到95%时训练完成,得到rv减速器故障诊断模型,从而实现rv减速器的故障诊断。
[0072]
图3中三根曲线,双线条为单通道 经典卷积模型,点划线为单通道 小波卷积能量池化模型;实线为数据融合 小波卷积能量池化模型(本发明);通过对比单通道 经典卷积模型与单通道 小波卷积能量池化模型,可以看出相同的45次模型训练下小波卷积能量池化模型的训练的准确率明显高于经典cnn模型,但其训练准确率在0.75左右就没有显著的提升趋于稳定,这是由于rv信号传递路径复杂,单一方向上的数据包含的故障信息不全,本发明提出的方法不仅融合了rv多方向上的数据,保障故障信息完整的同时还在故障的特征提取效率上得到了很大的提升,从图3中可以看出在训练次数达到20次时,准确率已经趋于平稳且趋近于1,表明本发明对rv的故障特征提取上远远优于cnn模型,且验证了数据融的有效性。
[0073]
上面结合附图对本发明的具体实施方式作了详细说明,但是本发明并不限于上述实施方式,在本领域普通技术人员所具备的知识范围内,还可以在不脱离本发明宗旨的前提下作出各种变化。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。