1.本实用新型涉及搬运机器人技术领域,具体为一种搬运机器人用取料电磁工装。
背景技术:
2.机器人是自动控制机器的俗称,自动控制机器包括一切模拟人类行为或思想与模拟其他生物的机械。狭义上对机器人的定义还有很多分类法及争议,有些电脑程序甚至也被称为机器人。在当代工业中,机器人指能自动执行任务的人造机器装置,用以取代或协助人类工作。理想中的高仿真机器人是高级整合控制论、机械电子、计算机与人工智能、材料学和仿生学的产物,目前科学界正在向此方向研究开发;电磁,物理概念之一,是物质所表现的电性和磁性的统称。如电磁感应、电磁波等等。电磁是丹麦科学家奥斯特发现的。电磁现象产生的原因在于电荷运动产生波动,形成磁场,因此所有的电磁现象都离不开电场。电磁学是研究电场和磁场的相互作用现象,及其规律和应用的物理学分支学科。麦克斯韦关于变化电场产生磁场的假设,奠定了电磁学的整个理论体系,发展了对现代文明起重大影响的电工和电子技术,深刻地影响着人们认识物质世界的思想;传统取料方式还是会有人工取料这种方式,这种取料方式效率低,费时费力,还会对工人的身体健康造成严重的损害。
技术实现要素:
3.本实用新型的目的在于提供了一种搬运机器人用取料电磁工装,通过机械化解决了传统人工取料的麻烦。
4.为实现上述目的,本实用新型提供如下技术方案:一种搬运机器人用取料电磁工装,包括机身,所述机身的上方设置有夹持机构,所述夹持机构包括一号电机、转杆、一号锥形齿轮、半个夹持机构、箱体,所述半个夹持机构包括二号锥形齿轮、一号限位块、一号螺纹杆、u型螺纹套、固定杆、夹块,所述箱体的两侧开口设置,所述一号电机固定安装在箱体的顶部,所述转杆贯穿箱体的顶部且与箱体的内壁活动连接,所述一号锥形齿轮固定套设在转杆的表面,所述一号限位块的上下两侧分别固定安装在箱体的内壁,所述一号螺纹杆的一端贯穿一号限位块的表面且与一号限位块的内壁活动连接,所述二号锥形齿轮固定套设在一号螺纹杆的表面,所述一号锥形齿轮与二号锥形齿轮啮合,所述u型螺纹套的内侧开设有螺纹,所述u型螺纹套的内侧开设有的螺纹处与一号螺纹杆螺纹连接,所述固定杆的一端固定安装在u型螺纹套的正面,所述夹块的背面与固定杆的另一端固定连接,所述u型螺纹套的表面与箱体的内壁接触,所述半个夹持机构的数量为两个,两个所述半个夹持机构分别对称设置在箱体内外的左右两侧,所述箱体的正面左右两侧分别开设有两个条形孔,两个所述固定杆的表面分别与两个所述条形孔的孔壁接触,两个所述条形孔均与箱体内部连通设置。
5.优选的,所述夹持机构的下方设置有平移机构,所述平移机构包括二号电机、二号螺纹杆、滑块、二号限位块,所述二号电机固定安装在机身的正面,所述机身的顶部开设有
一号滑槽,所述滑块位于一号滑槽内且与一号滑槽的槽壁滑动连接。
6.优选的,所述滑块的顶部固定安装有电动缸,所述电动缸的输出端固定连接有伸缩杆,所述伸缩杆的顶端固定安装有机头,所述机头的顶部与箱体的底部固定连接,通过设置的电动缸推动机头进行升降,从而调节了夹持机构的使用高度。
7.优选的,所述机身的底部四角处分别固定安装有四个万向轮,通过设置的四个所述万向轮增加了本装置的灵活性。
8.优选的,所述一号滑槽的槽壁两侧分别开设有二号滑槽、三号滑槽,所述二号限位块的数量为两个,两个所述二号限位块的一侧分别与滑块的两侧固定连接,两个所述二号限位块分别位于二号滑槽、三号滑槽内,两个所述二号限位块分别与二号滑槽、三号滑槽的槽壁滑动连接,通过设置的两个限位块对滑块实现限位的效果。
9.优选的,两个所述夹块的一侧分别固定安装有两个橡胶边条,通过设置的两个橡胶边条防止两个夹块在夹持取料时夹坏物料。
10.本实用新型提供了一种搬运机器人用取料电磁工装。具备以下有益效果:
11.(1)、本实用新型通过两个夹块的相互靠近,利用两个橡胶边条将待夹持的物料夹持住,再通过四个万向轮运输到指定的位置进行卸货即可,卸货只需反转一号电机,使两个夹块带动两个橡胶边条相互远离,松开夹持中的物料即可完成卸货,通过机械化解决了传统人工取料的麻烦。
12.(2)、本实用新型通过启动两个电动缸来调节夹持机构的使用高度,通过设置的两个二号限位块对滑块进行的限位,使滑块在一号滑槽内滑动,从而调节夹持机构的前后距离,解决了传统机械装置无法调节前后取料距离的问题。
附图说明
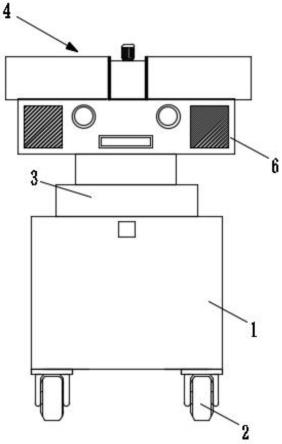
13.图1为本实用新型正视图;
14.图2为本实用新型正面剖视图;
15.图3为本实用新型夹持机构的正视图;
16.图4为本实用新型夹持机构的正面剖视图;
17.图5为本实用新型夹持机构的侧视图;
18.图6为本实用新型平移机构的结构示意图;
19.图7为本实用新型机身的结构示意图。
20.图中:1机身、2万向轮、3电动缸、4夹持机构、401一号电机、402转杆、403一号锥形齿轮、404半个夹持机构、4041二号锥形齿轮、4042一号限位块、4043一号螺纹杆、4044u型螺纹套、4045固定杆、4046夹块、4047橡胶边条、405箱体、5平移机构、501二号电机、502二号螺纹杆、503滑块、504二号限位块、6机头。
具体实施方式
21.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。
22.所述实施例的示例在附图中示出,其中自始至终相同或类似的标号表示相同或类
似的元件或具有相同或类似功能的元件。下面通过参考附图描述的实施例是示例性的,旨在用于解释本实用新型,而不能理解为对本实用新型的限制。
23.在本实用新型的描述中,需要理解的是,术语“中心”、“纵向”、“横向”、“长度”、“宽度”、“厚度”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”、“顺时针”、“逆时针”、“轴向”、“径向”、“周向”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。
24.在本实用新型中,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”、“固定”等术语应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或成一体;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通或两个元件的相互作用关系。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本实用新型中的具体含义。
25.如图1-7所示,本实用新型提供一种技术方案:一种搬运机器人用取料电磁工装,包括机身1,机身1的底部四角处分别固定安装有四个万向轮2,通过设置的四个万向轮2增加了本装置的灵活性,机身1的上方设置有夹持机构4,夹持机构4包括一号电机401、转杆402、一号锥形齿轮403、半个夹持机构404、箱体405,半个夹持机构404包括二号锥形齿轮4041、一号限位块4042、一号螺纹杆4043、u型螺纹套4044、固定杆4045、夹块4046,箱体405的两侧开口设置,一号电机401固定安装在箱体405的顶部,转杆402贯穿箱体405的顶部且与箱体405的内壁活动连接,一号锥形齿轮403固定套设在转杆402的表面,一号限位块4042的上下两侧分别固定安装在箱体405的内壁,一号螺纹杆4043的一端贯穿一号限位块4042的表面且与一号限位块4042的内壁活动连接,二号锥形齿轮4041固定套设在一号螺纹杆4043的表面,一号锥形齿轮403与二号锥形齿轮4041啮合,u型螺纹套4044的内侧开设有螺纹,u型螺纹套4044的内侧开设有的螺纹处与一号螺纹杆4043螺纹连接,固定杆4045的一端固定安装在u型螺纹套4044的正面,夹块4046的背面与固定杆4045的另一端固定连接,u型螺纹套4044的表面与箱体405的内壁接触,半个夹持机构404的数量为两个,两个半个夹持机构404分别对称设置在箱体405内外的左右两侧,箱体405的正面左右两侧分别开设有两个条形孔,两个固定杆4045的表面分别与两个条形孔的孔壁接触,两个条形孔均与箱体405内部连通设置,两个夹块4046的一侧分别固定安装有两个橡胶边条4047,通过设置的两个橡胶边条防止两个夹块4046在夹持取料时夹坏物料,通过两个夹块4046的相互靠近,利用两个橡胶边条4047将待夹持的物料夹持住,再通过四个万向轮2运输到指定的位置进行卸货即可,卸货只需反转一号电机401,使两个夹块4046带动两个橡胶边条4047相互远离,松开夹持中的物料即可完成卸货,通过机械化解决了传统人工取料的麻烦,夹持机构4的下方设置有平移机构5,平移机构5包括二号电机501、二号螺纹杆502、滑块503、二号限位块504,二号电机501固定安装在机身1的正面,机身1的顶部开设有一号滑槽,滑块503位于一号滑槽内且与一号滑槽的槽壁滑动连接,滑块503的顶部固定安装有电动缸3,电动缸3的输出端固定连接有伸缩杆,电动缸与plc控制系统连接,实现高精密运动控制,伸缩杆的顶端固定安装有机头6,机头6的顶部与箱体405的底部固定连接,通过设置的电动缸3推动机头6进行升降,从而调节了夹持机构4的使用高度,一号滑槽的槽壁两侧分别开设有二号滑槽、三号
滑槽,二号限位块504的数量为两个,两个二号限位块504的一侧分别与滑块503的两侧固定连接,两个二号限位块504分别位于二号滑槽、三号滑槽内,两个二号限位块504分别与二号滑槽、三号滑槽的槽壁滑动连接,通过设置的两个限位块504对滑块503实现限位的效果,通过启动两个电动缸3来调节夹持机构4的使用高度,通过设置的两个二号限位块504对滑块503进行的限位,使滑块503在一号滑槽内滑动,从而调节夹持机构4的前后距离,解决了传统机械装置无法调节前后取料距离的问题。
26.在使用时,通过四个万向轮2进行移动,通过启动一号电机401,使一号电机401带动转杆402转动,使转杆402带动一号锥形齿轮403转动,使一号锥形齿轮403带动两个二号锥形齿轮4041转动,通过设置的两个一号限位块4042分别对两个一号螺纹杆4043实现的限位,使两个二号锥形齿轮4041分别带动两个一号螺纹杆4043转动,由于两个两个一号螺纹杆4043分别与两个u型螺纹套4044内侧的螺纹连接,又通过箱体405内壁对u型螺纹套4044进行的限位,使两个u型螺纹套4044在箱体的内壁相互靠近相互远离,使两个固定杆4045分别在两个条形孔内滑动,使两个固定杆4045分别带动两个夹块4046相互靠近相互远离,只需启动两个电动缸3,使两个电动缸3分别带动两个伸缩杆进行伸缩,来调节夹持机构4的使用高度,待需要加持的物料与箱体呈水平方向时,通过启动二号电机501,使二号电机501带动二号螺纹杆502转动,通过设置的两个二号限位块504对滑块503进行的限位,使滑块503在一号滑槽内滑动,从而调节夹持机构4的前后距离,需要将待夹持的物料位于两个橡胶边条4047之间,只需通过两个夹块4046的相互靠近,利用两个橡胶边条4047将待夹持的物料夹持住,再通过四个万向轮2运输到指定的位置进行卸货即可,卸货只需反转一号电机401,使两个夹块4046带动两个橡胶边条4047相互远离,松开夹持中的物料即可完成卸货。
27.需要说明的是,在本文中,诸如第一和第二等之类的关系术语仅仅用来将一个实体或者操作与另一个实体或操作区分开来,而不一定要求或者暗示这些实体或操作之间存在任何这种实际的关系或者顺序。而且,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者设备所固有的要素。在没有更多限制的情况下,由语句“包括一个引用结构”限定的要素,并不排除在包括所述要素的过程、方法、物品或者设备中还存在另外的相同要素。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
