1.本发明涉及隧道壁钻孔机器人故障检测领域,具体是一种基于音频的隧道壁钻孔机器人故障检测方法。
背景技术:
2.钻孔机器人是用于隧道壁钻孔的施工设备,其特点是施工效率高,成孔速度快。钻孔机器人通过电机提供动力,通过气压系统传递给钻机完成钻进成孔作业。钻机作为钻孔机器人的重要工作部件,但由于钻孔机器人长时间工作,且隧道的工作环境十分恶劣,隧道壁钻孔机器人在钻孔过程常出现卡钻、断钻等故障,一旦产生故障,就会影响隧道钻孔的施工进度,因此有必要在隧道壁钻孔机器人工作时,对隧道壁钻孔机器人故障进行分析,在一定程度上减少因钻机故障而带来的损失。
3.在钻孔过程中,传统的故障诊断也基本是在已经发生较大的故障时,在施工现场根据常规的数据或者人的听觉、视觉等感官进行故障部位的判断,效率低,主观性强,影响生产进度,增加了成本。近年来,音频信号常被用于设备故障诊断,音频信号可以更直观反应故障问题所在,并且音频信号是非接触采集,不影响设备的工作,音频采集装置简单,便于安装,且采集速度快,因此,通过采集音频信号对隧道壁钻孔机器人钻孔状况检测是经济实用。
技术实现要素:
4.本发明的目的是提供一种基于音频的隧道壁钻孔机器人故障检测方法,该方法能有效识别隧道壁钻孔机器人钻孔过程的异常音频信号,从而对隧道壁钻孔机器人故障进行检测。
5.步骤1:利用声音传感器采集隧道壁钻孔机器人钻孔过程的音频信号;
6.步骤2:对采集的钻孔机器人工作时音频信号利用改进小波阈值滤波降噪;
7.步骤3:对滤波降噪后的音频信号进行预处理以及特征提取;
8.步骤4:构建ga优化的cnn模型,并训练ga-cnn模型;
9.步骤5:钻孔机器人故障检测时,将钻孔机器人工作时提取的音频信号特征数据放入训练后的ga-cnn模型中识别,判断其是故障还是正常,从而完成钻孔机器人故障检测。
10.作为优选,本发明提供的一种基于音频的隧道壁钻孔机器人故障检测方法,其特征在于,所述步骤1中,在钻孔机器人的钻机头周围安装多个高灵敏声音传感器,分布排列,将采集钻孔机器人不同运行状态下的音频信号。
11.作为优选,本发明提供的一种基于音频的隧道壁钻孔机器人故障检测方法,其特征在于,所述步骤5中,钻孔机器人工作状态一般包括正常状态和卡钻故障、断钻故障两种故障状态,通过事先采集钻孔机器人正常状态和卡钻故障、断钻故障时音频信号,重复步骤2和3完成特征提取,获取故障类型对应的故障音频特征,然后把钻孔机器实时工作状态音频信号特征与上述三种状态进行匹配,若当前钻孔机器人工作状态与某一个故障状态匹配
度高,则认定钻孔机器人故障,反之,则处于正常工作状态。
12.作为优选,本发明提供的一种基于音频的隧道壁钻孔机器人故障检测方法,其特征在于,所述步骤2中,对步骤1中的原始音频信号滤波处理采用改进小波阈值降噪法,通过滤波降噪,消除音频信号中的环境噪声,利用模平方插值的方法改进的阈值函数表达式:
[0013][0014]
式(1)中,w
j,k
为小波系数,thr为门限,为估计所得的小波系数。
[0015]
作为优选,本发明提供的一种基于音频的隧道壁钻孔机器人故障检测方法,其特征在于,所述步骤3中,先利用gwo算法优化的vmd分解对滤波降噪后的音频信号分解,实现自适应获取分解后的最佳模态分量数k,再利用峭度准则筛选分解后的模态分量,选择出有效的模态分量,对有效模态分量先进行预加重、分帧加窗;再fft变换,求梅尔滤波器能量,最后离散余弦变换得到mfcc特征,构建表征隧道壁钻孔机器人不同运行状态的特征向量集;
[0016]
作为优选,本发明提供的一种基于音频的隧道壁钻孔机器人故障检测方法,其特征在于,所述步骤4中,cnn模型包括输入层、卷积层、池化层、全连接层和输出层,对cnn模型进行训练时采用ga算法优化参数,得到更好的训练效果,提高判断的准确率;事先采集钻孔机器人卡钻故障、断钻故障时音频信号和钻孔机器人正常工作时的音频信号作为训练样本,分别重复步骤2和3,得出卡钻故障、断钻故障和正常工作时的mfcc特征组成的特征向量集,输入ga-cnn模型进行训练,得到训练后的ga-cnn模型;当对钻孔机器人进行故障分析时,把采集的音频信号经步骤2和3之后,得出的特征向量集输入到训练后的ga-cnn模型中进行匹配判断,通过ga-cnn模型的输出判断钻孔机器人钻孔状况,完成钻孔机器人故障检测。
[0017]
本发明与现有技术相比,其有益效果体现在:
[0018]
本发明的有益效果是为隧道钻孔机器人钻孔提供了一种基于音频的隧道壁钻孔机器人故障检测方法,通过分布式声音传感器阵列全方位采集隧道壁钻孔机器人钻孔过程音频信号,利用改进的小波阈值降噪法达到最优降噪效果,把降噪滤波后的音频信号再通过gwo算法优化vmd分解,自适应获取最优的模态分量数,再利用峭度准则筛选出有效的模态分量,然后对有效的模态分量提取mfcc特征,构成表征钻孔机器人不同运行状态的特征向量集,最后送入ga-cnn模型中,判断钻孔机器人的钻孔状况,简化故障分析过程,提高了故障分析准确度。本发明可以实时、快速对隧道壁钻孔机器人钻孔过程故障分析,提高了隧道壁钻孔机器人钻孔效率。
附图说明
[0019]
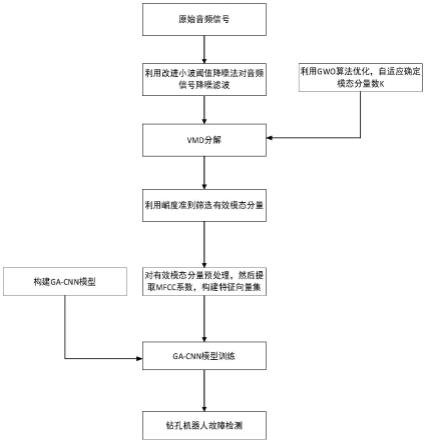
图1是基于音频的隧道壁钻孔机器人故障分析方法的流程图。
[0020]
图2是小波阈值降噪的流程图。
[0021]
图3是mfcc参数提取的流程图。
具体实施方式
[0022]
以下通过具体实施例对本发明做进一步解释说明。
[0023]
如图1所示,本发明实施例提供的一种基于音频的隧道壁钻孔机器人故障检测方法,包括如下步骤:
[0024]
步骤1:声音传感器采集隧道壁钻孔机器人钻孔过程的音频信号;
[0025]
为方便实现音频信号的多声音传感器的音频波束成形,本发明在布置声音传感器时采用环形分布式排列,声音传感器均等距分布且指向钻头钻孔方向,实现对钻孔机器人钻孔过程的全方位感知。
[0026]
步骤2:对采集的钻孔机器人工作时音频信号利用改进小波阈值滤波降噪;
[0027]
对步骤1中的原始音频信号滤波处理采用改进小波阈值降噪法,通过滤波降噪,消除音频信号中的环境噪声,利用模平方插值的方法改进的阈值函数表达式:
[0028][0029]
式(1)中,w
j,k
为小波系数,thr为门限,为估计所得小波系数。
[0030]
本实例中,采用db4作为小波基,对采集的音频信号作3层小波分解,通过改进阈值函数进行小波信号重构,得出降噪滤波后的音频信号。
[0031]
步骤3:对滤波降噪后的音频信号预处理以及特征提取;
[0032]
先利用gwo算法优化的vmd分解对滤波降噪后的音频信号分解,实现自适应获取分解后的最佳模态分量数k,再利用峭度准则筛选分解后的模态分量,选择出有效的模态分量,对有效模态分量先进行预加重、分帧加窗;再fft变换,求梅尔滤波器能量,最后离散余弦变换得到mfcc特征,构建表征隧道壁钻孔机器人钻孔状况的特征向量集;其中具体步骤如下:
[0033]
vmd约束条件:
[0034][0035]
式(2)中,{uk}={u1,u2,u3,
···
,uk}为模态函数集合,{wk}={w1,w2,w3,
···
,wk}为与模态函数对应的中心频率集合,k为模态分量数,x为音频信号。
[0036]
在本实例中,利用gwo算法优化的vmd分解对滤波降噪后的音频信号分解,实现自适应获取分解后的最佳模态分量数k=10。
[0037]
峭度值计算:
[0038][0039]
式(4)中,x
rms
为单帧音频信号内采样点的幅值均值与幅值标准差。
[0040]
在本实例中,峭度阈值设置为5。
[0041]
预加重:提高音频信号中的高频分量,弥补信号处理过程中的高频部分损失;
[0042]
预加重的传递函数为:
[0043]
h(z)=1-μz-1
ꢀꢀꢀ
(3)
[0044]
式(3)中,μ∈[0.9,1]。
[0045]
本实例中,为了使预加重取得最优的效果,取μ=0.9375。
[0046]
分帧加窗:音频信号具有短时平稳特性,利用这一特性对音频信号进行交叠分帧,然后利用加窗来减少截断效应,增加每一帧左右的连续性,分帧加窗后的帧信号:
[0047]
xn(m)=x(m)*w(n-m)
ꢀꢀꢀ
(4)
[0048]
式(4)中,xn(m)为加窗后的第n帧信号,x(m)为原始信号时间序列,w(m)为窗函数。
[0049]
在本实例中,取512个采样点为一帧,帧移为256个采样点,分帧时间为32ms,加窗采用汉明窗,其形式如下:
[0050][0051]
式(5)中,0≤n≤n-1,a取0.46。
[0052]
fft变换:
[0053]
x(n,k)=fft[xn(t)]
ꢀꢀꢀ
(6)
[0054]
式(6)中,k为频域中谱线序号,0≤k≤n-1,n为总谱线数。
[0055]
梅尔滤波器能量:
[0056][0057]
式(7)中,m为梅尔滤波器序号,1≤m≤m,m为梅尔滤波器总数;hm(k)为第m个梅尔滤波器频域响应。
[0058]
离散余弦变换:
[0059][0060]
式(8)中,j为离散余弦变换后的谱线。
[0061]
在本实例中,m设定为24。
[0062]
步骤4:构建ga优化的cnn模型,并训练ga-cnn模型;
[0063]
cnn模型包括输入层、卷积层、池化层、全连接层和输出层,对cnn模型进行训练时采用ga算法优化参数,得到更好的训练效果,提高判断的准确率;事先采集钻孔机器人卡钻故障、断钻故障时音频信号和钻孔机器人正常工作时的音频信号作为训练样本,分别重复步骤2和3,得出卡钻故障、断钻故障和正常工作时的mfcc特征组成的特征向量集,输入ga-cnn模型进行训练,得到训练后的ga-cnn模型;当对钻孔机器人进行故障分析时,把采集的音频信号经步骤2和3之后,得出的特征向量集输入到训练后的ga-cnn模型中进行匹配判断,通过ga-cnn模型的输出判断钻孔机器人钻孔状况,完成钻孔机器人故障检测。
[0064]
本实例中,卷积层采用sigmoid函数,池化层采用最大池化,输出层采用softmax函数。
[0065]
步骤5:钻孔机器人故障检测时,将钻孔机器人工作时提取的音频信号特征数据放入训练后的ga-cnn模型中识别,判断其是故障还是正常,从而完成钻孔机器人故障检测。
[0066]
钻孔机器人工作状态一般包括正常状态和卡钻故障、断钻故障两种故障状态,通过事先采集钻孔机器人正常状态和卡钻故障、断钻故障时音频信号,重复步骤2和3完成特征提取,获取故障类型对应的故障音频特征,然后把钻孔机器实时工作状态音频信号特征与上述三种状态进行匹配,若当前钻孔机器人工作状态与某一个故障状态匹配度高,则认定钻孔机器人故障,反之,则处于正常工作状态;
[0067]
对于本领域技术人员而言,显然本发明不限于上述示范性实施例的细节,而且在不背离本发明的精神或基本特征的情况下,能够以其他的具体形式实现本发明。因此,无论从哪一点来看,均应将实施例看作是示范性的,而且是非限制性的,本发明的范围由所附权利要求而不是上述说明限定,因此旨在将落在权利要求的等同要件的含义和范围内的所有变化囊括在本发明内。不应将权利要求中的任何附图标记视为限制所涉及的权利要求。
[0068]
此外,应当理解,虽然本说明书按照实施方式加以描述,但并非每个实施方式仅包含一个独立的技术方案,说明书的这种叙述方式仅仅是为清楚起见,本领域技术人员应当将说明书作为一个整体,各实施例中的技术方案也可以经适当组合,形成本领域技术人员可以理解的其他实施方式。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。