1.本实用新型涉及到对地面的清洁领域,具体涉及到一种拖地机。
背景技术:
2.现有拖地机主要在地面上来执行拖地清洁功能,其中,针对手持拖地机的结构部分,主要设置推动杆来推动拖地机在地面上移动实现完成对地面的清洁处理,推动杆主要通过连接件来对接相连在拖地机的机器主体上,连接件实现可旋转的固定相连结构,因推动杆的整体长度较长,使得推动杆在对接安装和拆卸的过程中极为不方便,用户需要通过手动卡接或插接的方式来实现对推动杆来进行与连接件的安装和拆卸,导致用户的操作过程较为复杂且操作强度较大,容易出现对推动杆和连接件损坏的问题。
技术实现要素:
3.本实用新型旨在至少在一定程度上解决上述相关技术中的技术问题之一。
4.为此,本实用新型的目的在于提供拖地机,主要解决现有拖地机的推动杆安装不方便导致容易出现损坏的问题。
5.本实用新型的实施方式提供了拖地机,包括机器主体,机器主体上设置有拖布,拖布设置为可贴合地面水平旋转运动的结构;
6.还包括推动杆,推动杆与机器主体之间设置有磁性对接模块,且推动杆可通过磁性对接模块来构成与机器主体之间可拆卸的相连结构;
7.当推动杆通过磁性对接模块安装在机器主体上时推动杆构成为可相对机器主体进行旋转运动的结构,并构成为可通过推动杆来推动拖地机在地面上移动的结构;
8.当推动杆未安装在位时至少设置拖布水平旋转运动时可提供动力源来进行驱动拖地机在地面上移动。
9.前述的拖地机,磁性对接模块包括第一磁性件和第二磁性件,第一磁性件位于机器主体上,第二磁性件位于推动杆上,当推动杆安装在位时设置第一磁性件的磁极与第二磁性件的磁极相反来构成磁性吸合的相连结构。
10.前述的拖地机,第一磁性件上设置有呈弧形结构的第一转向部,且第二磁性件上对应的设置有呈弧形结构的第二转向部,第一转向部和第二转向部设置为相互接触贴合的结构或相互包覆环绕的结构来使得推动杆可通过第一转向部和第二转向来相对机器主体进行旋转运动。
11.前述的拖地机,第一磁性件与机器主体之间设置有第一转向件且第一磁性件通过第一转向件与机器主体可旋转地相连来构成第一磁性件可相对机器主体进行旋转运动的结构;
12.和/或,第二磁性件与推动杆之间设置有第二转向件且第二磁性件通过第二转向件与推动杆可旋转地相连来构成推动杆可相对第二磁性件进行旋转运动的结构。
13.前述的拖地机,机器主体上设置有第一套接部,推动杆上设置有第二套接部,且推
动杆通过第二套接部可套接安装在第一套接部内来构成可套接旋转运动的结构;
14.第一套接部上安装第一磁性件且第二套接部上安装第二磁性件,当沿第一方向旋转将推动杆套接安装在位时第一磁性件和第二磁性件形成接触的磁性吸合结构,且当沿第二方向旋转推动杆时第一磁性件和第二磁性件形成脱离磁性吸合结构。
15.前述的拖地机,机器主体与推动杆之间设置有脱顶模块,脱顶模块包括位于机器主体上的第一脱顶部和位于推动杆上的第二脱顶部,设置当推动杆相对机器主体构成有角度a时第一脱顶部和第二脱顶部构成为相互接触的顶触结构来使得第一磁性件和第二磁性件进行脱离磁性吸合结构。
16.前述的拖地机,设置推动杆位于机器主体的后侧位置上,且推动杆设置为至少可沿前后方向来进行旋转运动的结构,设置角度a为推动杆相对机器主体朝向前侧方向呈倾斜的状态下与推动杆相对机器主体呈垂直的状态下构成的夹角,且a小于等于45度。
17.前述的拖地机,还包括控制单元,第一磁性件和/或第二磁性件设置为电磁铁,控制单元内设置有控制第一磁性件和第二磁性件的磁极呈相反磁极的阈值a,且设置有控制第一磁性件和第二磁性件的磁极呈相同磁极的阈值b。
18.前述的拖地机,机器主体上或推动杆上设置有可提供旋转动力的带转件;
19.带转件设置为与第一磁性件相连的结构且设置为可带动第一磁性件旋转来使得将第一磁性件的磁极切换为相反磁极,并使得第一磁性件的磁极与第二磁性件的磁极呈相同磁极;
20.或,带转件设置为与第二磁性件相连的结构且设置为可带动第二磁性件旋转来使得将第二磁性件的磁极切换为相反磁极,并使得第二磁性件的磁极与第一磁性件的磁极呈相同磁极。
21.前述的拖地机,推动杆上安装有第一触动件,第一触动件设置为可伸缩的结构,且第一触动件设置为朝向机器主体方向可延伸伸出的结构,当第一触动件处于伸出状态时第一触动件的下端部分接触机器主体或接触第一磁性件来使得第一磁性件和第二磁性件进行脱离磁性吸合结构;
22.或,机器主体上安装有第二触动件,第二触动件设置为可伸缩的结构,且第二触动件设置为朝向推动杆方向可延伸伸出的结构,当第二触动件处于伸出状态时第二触动件的上端部分接触推动杆或接触第二磁性件来使得第一磁性件和第二磁性件进行脱离磁性吸合结构。
23.与现有技术相比,本实用新型具有如下有益效果:
24.本方案的拖地机具备多功能的使用效果,拖地机可以来构成手持式结构,当推动杆安装在位时可以实现手持式结构来对地面进行清洁处理,拖地机还可以来构成自移动式结构,当推动杆拆卸下时拖布实现带动拖地机在地面上自主移动,使得拖地机的可适用范围更广,可以更好的匹配用户的使用需求。
25.本方案的推动杆与机器主体之间通过设置磁性对接模块来实现对推动杆的安装和拆卸,推动杆无需用户来进行插接或卡接,极大的降低了对推动杆进行安装的难度,且对推动杆的整体安装更简单,更容易对推动杆进行安装,且安装强度更小。
26.本方案的磁性对接模块来实现通过磁性吸合的方式实现推动杆与机器主体之间的相连结构,实现对接相连的稳定性,且可实现推动杆的可旋转对接效果,推动杆进行旋转
的效果更灵活,整体的旋转自由度更高,有利于提升用户操作推动杆的便捷性。
27.本方案的磁性对接模块设置第一磁性件和第二磁性件,通过第一磁性件和第二磁性件的磁性吸合的吸力来实现对推动杆的安装,同时可以通过第一磁性件和第二磁性件的相同磁极的磁性排斥力来将推动杆进行拆卸,极大的降低了对推动杆的安装和拆卸的难度。
28.本方案的第一磁性件和第二磁性件的对接安装结构部分,可以设置为第一磁性件和第二磁性件来进行旋转实现推动杆的旋转运动结构,也可以设置通过第一转向件、第二转向件来实现推动杆的旋转运动结构,实现有效的提升推动杆在磁性对接模块的对接安装下进行灵活的旋转运动,提升用户的使用体验效果。
29.本方案中,针对第一磁性件和第二磁性件来进行拆卸使得实现对推动杆的拆卸结构部分,可以设置来使得第一磁性件和第二磁性件的磁极相同来实现进行拆卸的效果,也可以设置脱顶模块来进行顶触进行拆卸的结构,还可以设置第一触动件、第二触动件来进行触动拆卸的结构,均可有效地来实现将第一磁性件和第二磁性件进行分离,进而实现对推动杆的快速简易拆卸效果,极大的降低了对推动杆的拆卸难度。
30.本方案的推动杆与机器主体之间的整体对接结构部分,可以有效的实现对推动杆的安装和拆卸,降低安装和拆卸的难度、强度,简化用户操作的过程,实现更好的匹配用户的使用需求,极大的提升了用户的使用体验效果。
附图说明
31.图1为拖地机的立体示意图;
32.图2为磁性对接模块来对推动杆进行安装的示意图;
33.图3为第一磁性件通过第一转向件来实现推动杆相对机器主体进行旋转的示意图;
34.图4为第二磁性件通过第二转向件来实现推动杆相对机器主体进行旋转的示意图;
35.图5为推动杆沿第一方向旋转使得第一磁性件和第二磁性件磁性吸合来安装推动杆的示意图;
36.图6为推动杆沿第二方向旋转使得第一磁性件和第二磁性件脱离磁性吸合来可拆卸推动杆的示意图;
37.图7为设置带转件的结构下第一磁性件和第二磁性件磁性吸合来安装推动杆的示意图;
38.图8为带转件来带动第二磁性件旋转切换磁极的示意使得第一磁性件和第二磁性件形成排斥力来拆卸推动杆的示意图;
39.图9为在机器主体上设置第二触动件来使得第一磁性件和第二磁性件分离进行可拆卸推动杆的示意图;
40.图10为在推动杆上设置第一触动件来使得第一磁性件和第二磁性件分离进行可拆卸推动杆的示意图;
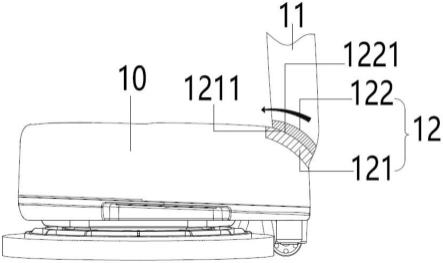
41.图11为推动杆朝向前侧方向倾斜来构成角度并在脱顶模块结构下来可拆卸推动杆的示意图;
42.附图标记:1-拖地机,10-机器主体,101-拖布,102-第一套接部,103-第二触动件,11-推动杆,111-第二套接部,112-第一触动件,12-磁性对接模块,121-第一磁性件,1211-第一转向部,122-第二磁性件,1221-第二转向部,13-第一转向件,14-第二转向件,15-带转件,16-脱顶模块,161-第一脱顶部,162-第二脱顶部。
具体实施方式
43.为了使本实用新型实现的技术手段、创作特征、达成目的与功效易于明白了解,下面结合具体实施例,进一步阐述本实用新型。
44.实施例:本实用新型的拖地机,如图1至图11构成所示,拖地机1主要在地面上来执行拖地清洁功能,主要设置通过拖布101接触地面,并在接触地面的时候进行水平旋转来实现对地面的大面积、大摩擦力的拖地清洁,有利于提升拖布101对地面的整体清洁效果和效率。
45.同时,本方案的拖地机1可以来实现多功能的使用效果,拖地机1可以来构成手持式结构,当推动杆11安装在位时可以实现手持式结构来对地面进行清洁处理,拖地机1还可以来构成自移动式结构,当推动杆11拆卸下时拖布101实现带动拖地机1在地面上自主移动,使得拖地机1的可适用范围更广,可以更好的匹配用户的使用需求。
46.本方案的拖地机1,包括机器主体10,机器主体10上设置有拖布101,拖布101主要设置为盘状结构,拖布101设置为可贴合地面水平旋转运动的结构,主要为拖布101的底部面接触地面来进行水平旋转运动的效果,通过拖布101的水平旋转运动来实现对地面的大摩擦力清洁效果。
47.针对拖地机1的结构部分,还包括推动杆11,推动杆11主要用于用户的手持,用户可以通过手持推动杆11来实现操作拖地机1在地面行进行移动来进行清洁处理,其中,推动杆11与机器主体10之间设置有磁性对接模块12,且推动杆11可通过磁性对接模块12来构成与机器主体10之间可拆卸的相连结构;磁性对接模块12来实现推动杆11与机器主体10之间的安装相连结构,以便在需要的时候来选择性地将推动杆11对接安装到机器主体10上,当推动杆11通过磁性对接模块12安装在机器主体10上时推动杆11构成为可相对机器主体10进行旋转运动的结构,并构成为可通过推动杆11来推动拖地机1在地面上移动的结构,此时推动杆11安装在位来实现构成拖地机1的手持式结构,用户可以通过操作推动杆11来实现推动拖地机1在地面上移动进行对地面的清洁处理,同时推动杆11通过磁性对接模块12安装在位时推动杆11设置为可旋转运动的结构,以便可以操作推动杆11旋转来更好的适应用户的手持需求;当推动杆11未安装在位时至少设置拖布101水平旋转运动时可提供动力源来进行驱动拖地机1在地面上移动,即为,当将推动杆11进行拆卸下后,此时可以来构成拖地机1的自移动式结构,拖布101水平旋转运动可以来驱动拖地机1在地面上进行自主移动,利用拖布101水平旋转运动的动力来作为拖地机1在地面上移动的动力源,此时拖地机1上无需设置驱动轮结构,拖地机1的整体结构更简答,且推动杆11因被拆卸下而不会形成对拖地机1在地面上自主移动的阻挡;通过磁性对接模块12来实现对拖地机1的安装和拆卸,提升对推动杆11进行安装和拆卸的便捷度,并实现拖地机1的多功能使用效果。
48.具体地,针对拖布101来驱动拖地机1在地面上进行移动的结构部分,主要设置两个拖布101,两个拖布101呈并列分布的结构,主要设置为沿机器主体10的长度方向来呈并
列分布的结构,同时,设置两个拖布101的水平旋转方向为相反方向,并设置两个拖布101相对地面均构成倾斜结构,使得两个拖布101在接触地面进行水平旋转运动时均能够形成不均衡的摩擦力,进而在不均衡的摩擦力的合力的作用下来实现驱动拖地机1在地上移动,拖地机1上无需设置驱动轮结构,整体结构更简单,且可以更好的合理分布拖布101的结构位置来实现拖布101较大的范围内覆盖机器主体10的底部位置,实现大面积、大摩擦力的拖地清洁效果。
49.其中,可以在机器主体10内设置驱动电机来驱动拖布101的进行水平旋转运动,并可以根据需要来控制驱动电机来驱动拖布101进行顺时针水平旋转运动或逆时针水平旋转运动,进而实现控制拖地机1在地面上前进、后退或转弯移动。
50.本方案的推动杆11与机器主体10之间通过设置磁性对接模块12来实现对推动杆11的安装和拆卸,推动杆11无需用户来进行插接或卡接,极大的降低了对推动杆11进行安装的难度,且对推动杆11的整体安装更简单,更容易对推动杆11进行安装,且安装强度更小。
51.本方案的磁性对接模块12的具体结构部分,磁性对接模块12包括第一磁性件121和第二磁性件122,第一磁性件121位于机器主体10上,第二磁性件122位于推动杆11上,当推动杆11安装在位时设置第一磁性件121的磁极与第二磁性件122的磁极相反来构成磁性吸合的相连结构,可以为,第一磁性件121和第二磁性件122设置为由磁性材质构成使得第一磁性件121和第二磁性件122能够进行磁性吸合来产生吸力实现第一磁性件121和第二磁性件122的对接相连,即为实现将推动杆11通过第二磁性件122和第一磁性件121来与机器主体10相连;也可以为,第一磁性件121和第二磁性件122上安装有由磁性材质构成的部件来使得第一磁性件121和第二磁性件122可以进行磁性吸合来产生吸力实现磁性对接的效果,这样实现第一磁性件121和第二磁性件122之间无需来进行卡接或插接,进一步实现推动杆11与机器主体10之间无需进行卡接或插接,只需要操作推动杆11及其上的第二磁性件122来靠近机器主体10及其上的第一磁性件121的位置即可实现磁性吸合相连的效果,无需进行准备的对位安装,极大的简化了对推动杆11进行安装的结构,同时降低操作推动杆11进行安装的强度和难度。
52.本方案的磁性对接模块12设置第一磁性件121和第二磁性件122,通过第一磁性件121和第二磁性件122的磁性吸合的吸力来实现对推动杆11的安装,同时可以通过第一磁性件121和第二磁性件122的相同磁极的磁性排斥力来将推动杆11进行拆卸,极大的降低了对推动杆11的安装和拆卸的难度。
53.针对推动杆11通过磁性对接模块12安装在机器主体10上并可相对机器主体10来旋转运动的结构部分,可以为,在第一磁性件121上设置有呈弧形结构的第一转向部1211,且第二磁性件122上对应的设置有呈弧形结构的第二转向部1221,第一转向部1211和第二转向部1221设置为相互接触贴合的结构或相互包覆环绕的结构来使得推动杆11可通过第一转向部1211和第二转向来相对机器主体10进行旋转运动,第一磁性件121和第二磁性件122对接的结构来构成为第一转向部1211和第二转向部1221之间来进行对接,可以为第一转向部1211与第二转向部1221之间形成相互接触贴合的磁性吸合结构,此时虽然第一转向部1211和第二转向部1221为磁性吸合的结构,但是在弧形结构下以及用户对推动杆11操作的状态下可以实现推动杆11带动第二磁性件122通过第二转向部1221和第一转向部1211来
进行旋转运动,磁性吸合的结构不会对推动杆11的旋转运动形成阻挡,及时在推动杆11旋转的过程中也会使得第一磁性件121和第二磁性件122形成磁性吸合的效果,这样既可实现推动杆11通过第二磁性件122和第一磁性件121来形成与机器主体10的磁性对接安装效果,同时实现推动杆11通过第二磁性件122和第一磁性件121能够进行相对机器主体10进行旋转运动,方便用户操作拖地机1来使用拖地机1;也可以为第一转向部1211与第二转向部1221之间来形成相互包覆环绕的结构实现磁性吸合结构,同时在包覆环绕的结构下还可以实现第一磁性件121和第二磁性件122来相对进行旋转运动,在包覆环绕的结构下以及用户对推动杆11操作的状态下可以实现推动杆11带动第二磁性件122通过第二转向部1221和第一转向部1211来进行旋转运动,磁性吸合的结构不会对推动杆11的旋转运动形成阻挡,及时在推动杆11旋转的过程中也会使得第一磁性件121和第二磁性件122形成磁性吸合的效果,这样既可实现推动杆11通过第二磁性件122和第一磁性件121来形成与机器主体10的磁性对接安装效果,同时实现推动杆11通过第二磁性件122和第一磁性件121能够进行相对机器主体10进行旋转运动,方便用户操作拖地机1来使用拖地机1;可见,可以有效的来实现推动杆11在磁性对接安装的结构下进行旋转运动,进而方便用户使用推动杆11。
54.针对推动杆11通过磁性对接模块12安装在机器主体10上并可相对机器主体10来旋转运动的结构部分,还可以为,在第一磁性件121与机器主体10之间设置有第一转向件13且第一磁性件121通过第一转向件13与机器主体10可旋转地相连来构成第一磁性件121可相对机器主体10进行旋转运动的结构,即为第一磁性件121通过第一转向件13来安装在机器主体10上,第一转向件13可以通过旋转轴或万向轴来对接安装在机器主体10上实现第一转向件13可以相对机器主体10进行旋转运动,同时因第一转向件13和第一磁性件121相连实现第一转向件13可以带动第一磁性件121来进行同步的旋转运动效果,此时当推动杆11通过第二磁性件122对接安装在第一磁性件121上时,在用户操作推动杆11受力的状态下即可实现推动杆11来通过第一转向件13相对机器主体10进行旋转运动,这样既可实现推动杆11通过第二磁性件122和第一磁性件121来形成与机器主体10的磁性对接安装效果,同时实现推动杆11通过第一转向件13能够进行相对机器主体10进行旋转运动,方便用户操作拖地机1来使用拖地机1;和/或,还可以为,第二磁性件122与推动杆11之间设置有第二转向件14且第二磁性件122通过第二转向件14与推动杆11可旋转地相连来构成推动杆11可相对第二磁性件122进行旋转运动的结构,即为第二磁性件122通过第二转向件14来安装在推动杆11上,第二转向件14可以通过旋转轴或万向轴来对接安装在推动杆11上实现第二转向件14可以相对推动杆11进行旋转运动,同时因第二转向件14和第二磁性件122相连实现第二转向件14可以带动第二磁性件122来进行同步的旋转运动效果,此时当推动杆11通过第二磁性件122对接安装在第一磁性件121上时,在用户操作推动杆11受力的状态下即可实现推动杆11来通过第二转向件14相对机器主体10进行旋转运动,这样既可实现推动杆11通过第二磁性件122和第一磁性件121来形成与机器主体10的磁性对接安装效果,同时实现推动杆11通过第二转向件14能够进行相对机器主体10进行旋转运动,方便用户操作拖地机1来使用拖地机1。
55.针对推动杆11通过磁性对接模块12安装到机器主体10上的结构部分,可以为,在机器主体10上设置有第一套接部102,推动杆11上设置有第二套接部111,且推动杆11通过第二套接部111可套接安装在第一套接部102内来构成可套接旋转运动的结构,第一套接部
102和第二套接部111可以设置为构成套筒和套柱的结构,如第一套接部102设置为套筒结构,第二套接部111设置为套柱结构,可以将推动杆11带动第二套接部111来套接进入到第一套接部102内,实现套接对接的效果,并将第一套接部102上安装第一磁性件121且第二套接部111上安装第二磁性件122,当沿第一方向旋转将推动杆11套接安装在位时第一磁性件121和第二磁性件122形成接触的磁性吸合结构,且当沿第二方向旋转推动杆11时第一磁性件121和第二磁性件122形成脱离磁性吸合结构,如,当将推动杆11的第二套接部111套接进入到第一套接部102内安装时并沿第一方向旋转推动杆11此时会使得推动杆11上的第二磁性件122来靠近第一磁性件121实现接触的磁性吸合的相连结构,实现对推动杆11的安装效果,当沿第二方向旋转推动杆11时此时会使得推动杆11上的第二磁性件122来远离第一磁性件121实现脱离磁性吸合结构,进而实现对推动杆11的拆卸效果,其中,第一方向和第二方向为相反方向,如第一方向为顺时针方向时则第二方向为逆时针方向,或如第一方向为逆时针方向时则第二方向为顺时针方向,可实现有效的来对推动杆11进行安装和拆卸,无需进行准确对位,无需进行插接或卡接,整体安装结构简单,难度和强度均较低。
56.可选地,也可以设置为第一套接部102设置为套柱结构,第二套接部111设置为套筒结构,可以将推动杆11带动第二套接部111来与第一套接部102进行套接安装,实现套接对接的效果。
57.为了提升对推动杆11的拆卸便捷度,有效的实现第一磁性件121和第二磁性件122来进行脱离,本方案的机器主体10与推动杆11之间设置有脱顶模块16,通过脱顶模块16来实现顶触结构使得第一磁性件121和第二磁性件122进行强制的脱离,进而实现对推动杆11的拆卸效果,具体地,脱顶模块16包括位于机器主体10上的第一脱顶部161和位于推动杆11上的第二脱顶部162,可以将第一脱顶部161和第二脱顶部162设置为呈凸起的结构,并设置当推动杆11相对机器主体10构成有角度a时第一脱顶部161和第二脱顶部162构成为相互接触的顶触结构来使得第一磁性件121和第二磁性件122进行脱离磁性吸合结构,即为当用户操作推动杆11旋转时,并将推动杆11旋转至角度a时,此时第一脱顶部161和第二脱顶部162来形成逐渐接触的结构使得在第一脱顶部161和第二脱顶部162相互顶触的结构下形成第一磁性件121和第二磁性件122进行强制脱离,即可实现将推动杆11进行拆卸下,可见,本方案设置脱顶模块16可以来进一步提升对推动杆11的拆卸便捷度,用户只需要操作推动杆11旋转到角度a时即可实现将推动杆11进行拆卸下,有效降低用户将推动杆11进行拆卸下的难度和强度。
58.其中,具体的结构部分,设置推动杆11位于机器主体10的后侧位置上,且推动杆11设置为至少可沿前后方向来进行旋转运动的结构,当用户操作推动杆11正常推动机器主体10进行移动时,此时用户操作推动杆11朝向后方倾斜来推动拖地机1在地面上前进来对地面进行清洁处理,为了防止用户在操作推动杆11朝向后方倾斜时导致推动杆11被拆卸下,本方案设置角度a为推动杆11相对机器主体10朝向前侧方向呈倾斜的状态下与推动杆11相对机器主体10呈垂直的状态下构成的夹角,且a小于等于45度,即为只有当用户操作推动杆11朝向前侧方向倾斜并使得倾斜角度呈a时才会使得第一磁性件121和第二磁性件122被脱顶模块16来形成顶触脱离的结构,此时可以将推动杆11进行拆卸下,有效的防止出现用户误拆推动杆11的问题,同时简化了用户拆卸推动杆11的结构。
59.针对本方案的磁性对接模块12的结构部分,还包括控制单元,可以将第一磁性件
121和/或第二磁性件122设置为电磁铁,电磁铁可以分别与控制单元电性相连,并与电源模块来电性相连,主要在控制单元内设置有控制第一磁性件121和第二磁性件122的磁极呈相反磁极的阈值a,在需要安装推动杆11时控制单元触发阈值a来使得第一磁性件121和第二磁性件122的磁极相反可以来形成磁性吸合的吸力,此时可以实现第一磁性件121和第二磁性件122的对接相连效果,即可实现磁性对接模块12来对推动杆11的安装,且设置有控制第一磁性件121和第二磁性件122的磁极呈相同磁极的阈值b,当需要拆卸下推动杆11时控制单元触发阈值b来使得第一磁性件121和第二磁性件122的磁极相同可以来形成磁性排斥力,此时可以实现第一磁性件121和第二磁性件122通过相互的排斥力来进行脱离,即可实现将推动杆11进行拆卸下,可见,通过设置电磁铁结构可以更好的来控制对推动杆11的安装和拆卸,可以极大的提升用户的操作容易度。
60.优选地,a小于等于30度,此时更方便用户来对推动杆11进行朝向前侧方向倾斜实现通过脱顶模块16来将使得第一磁性件121和第二磁性件122进行脱离磁性吸合的结构,方便将推动杆11拆卸下来。
61.具体,可以根据需要来设定控制第一磁性件121或第二磁性件122的磁极,只需要可以有效的满足相反磁极来对推动杆11进行磁性吸合来实现对接安装和相同磁极来对推动杆11进行脱离磁性吸合来实现拆卸即可。
62.为了进一步提升对推动杆11的拆卸效果,本方案可以在机器主体10上或推动杆11上设置有可提供旋转动力的带转件15,如设置电机结构,电机工作时可以实现来对应的提供旋转动力,旋转动力可以来实现带转件15向外提供旋转动力,带转件15安装在机器主体10上时可以实现来带动第一磁性件121进行旋转,带转件15安装在推动杆11上时可以实现来带动第二磁性件122进行旋转,具体地对应结构部分,带转件15设置为与第一磁性件121相连的结构且设置为可带动第一磁性件121旋转来使得将第一磁性件121的磁极切换为相反磁极,并使得第一磁性件121的磁极与第二磁性件122的磁极呈相同磁极,当带转件15启动工作时可以实现带动第一磁性件121旋转,此时第一磁性件121旋转使得第一磁性件121上与第二磁性件122磁性吸合的位置发生旋转变化,这样会使得第一磁性件121上的相反磁极的位置来旋转到与第二磁性件122磁性吸合的位置上,这时候会使得第一磁性件121与第二磁性件122之间形成有相同的磁极,此时第一磁性件121和第二磁性件122由磁性吸合的吸力切换为磁性排斥力,使得第一磁性件121和第二磁性件122进行脱离,在脱离的结构下用户可以较为轻易的来拆卸下推动杆11,可以根据第一磁性件121和第二磁性件122的具体形状来设定第一磁性件121进行旋转的方向,只需要满足第一磁性件121在旋转后会使得第一磁性件121和第二磁性件122会形成磁性排斥力即可,这样方便用户来对推动杆11进行拆卸;或,带转件15设置为与第二磁性件122相连的结构且设置为可带动第二磁性件122旋转来使得将第二磁性件122的磁极切换为相反磁极,并使得第二磁性件122的磁极与第一磁性件121的磁极呈相同磁极,当带转件15启动工作时可以实现带动第二磁性件122旋转,此时第二磁性件122旋转使得第二磁性件122上与第一磁性件121磁性吸合的位置发生旋转变化,这样会使得第二磁性件122上的相反磁极的位置来旋转到与第一磁性件121磁性吸合的位置上,这时候会使得第一磁性件121与第二磁性件122之间形成有相同的磁极,此时第一磁性件121和第二磁性件122由磁性吸合的吸力切换为磁性排斥力,使得第一磁性件121和第二磁性件122进行脱离,在脱离的结构下用户可以较为轻易的来拆卸下推动杆11,可以根
据第一磁性件121和第二磁性件122的具体形状来设定第二磁性件122进行旋转的方向,只需要满足第二磁性件122在旋转后会使得第一磁性件121和第二磁性件122会形成磁性排斥力即可,这样方便用户来对推动杆11进行拆卸;可见,整体上实现用户简单快速地来对推动杆11进行拆卸下,整体上降低了对推动杆11进行安装和拆卸的难度,降低了用户的操作强度,极大的提升了用户的使用体验效果。
63.为了进一步提升对推动杆11的拆卸效果,本方案可以为,在推动杆11上安装有第一触动件112,第一触动件112设置为可伸缩的结构,如利用电机或弹簧结构来实现第一触动件112的伸缩效果,且第一触动件112设置为朝向机器主体10方向可延伸伸出的结构,当第一触动件112处于伸出状态时第一触动件112的下端部分接触机器主体10或接触第一磁性件121来使得第一磁性件121和第二磁性件122进行脱离磁性吸合结构,即为,当第一触动件112处于缩回的结构时,此时第一磁性件121和第二磁性件122可以来实现磁性吸合的吸力形成相连的结构,此时磁性对接模块12可以将推动杆11安装在位,当第一触动件112处于伸出的结构时,此时因第一触动件112的下端部分形成伸出的预顶结构会使得将第二磁性件122及推动杆11来运动进行远离第一磁性件121,实现第一磁性件121和第二磁性件122进行强制脱离的效果,进而可以来将推动杆11进行拆卸下,第一触动件112可以设置为来根据用户的使用需求进行触发后启动工作实现由缩回状态到伸出状态,即可通过第一触动件112来实现将推动杆11进行较为方便的拆卸下;或,机器主体10上安装有第二触动件103,第二触动件103设置为可伸缩的结构,如利用电机或弹簧结构来实现第一触动件112的伸缩效果,且第二触动件103设置为朝向推动杆11方向可延伸伸出的结构,当第二触动件103处于伸出状态时第二触动件103的上端部分接触推动杆11或接触第二磁性件122来使得第一磁性件121和第二磁性件122进行脱离磁性吸合结构,即为,当第二触动件103处于缩回的结构时,此时第一磁性件121和第二磁性件122可以来实现磁性吸合的吸力形成相连的结构,此时磁性对接模块12可以将推动杆11安装在位,当第二触动件103处于伸出的结构时,此时因第二触动件103的下端部分形成伸出的预顶结构会使得将第二磁性件122及推动杆11来运动进行远离第一磁性件121,实现第一磁性件121和第二磁性件122进行强制脱离的效果,进而可以来将推动杆11进行拆卸下,第二触动件103可以设置为来根据用户的使用需求进行触发后启动工作实现由缩回状态到伸出状态,即可通过第二触动件103来实现将推动杆11进行较为方便的拆卸下。
64.可见,本方案中,针对第一磁性件121和第二磁性件122来进行拆卸使得实现对推动杆11的拆卸结构部分,可以设置来使得第一磁性件121和第二磁性件122的磁极相同来实现进行拆卸的效果,也可以设置脱顶模块16来进行顶触进行拆卸的结构,还可以设置第一触动件112、第二触动件103来进行触动拆卸的结构,均可有效地来实现将第一磁性件121和第二磁性件122进行分离,进而实现对推动杆11的快速简易拆卸效果,极大的降低了对推动杆11的拆卸难度。
65.本方案的推动杆11与机器主体10之间的整体对接结构部分,可以有效的实现对推动杆11的安装和拆卸,降低安装和拆卸的难度、强度,简化用户操作的过程,实现更好的匹配用户的使用需求,极大的提升了用户的使用体验效果。
66.工作原理:本方案的拖地机1的结构部分,包括机器主体10和推动杆11,机器主体10上安装拖布101,拖布101既作为接触地面进行清洁的部件,也作为取得拖地机1在地面上
自主移动的部件;同时,推动杆11设置为可拆卸的安装结构,主要通过设置磁性对接模块12来实现对推动杆11的安装在位和拆卸下的效果,磁性对接模块12主要通过磁性吸合的吸力来实现对推动杆11的安装效果,不需要用户来进行准确的对接插接或卡接,极大的简化了对推动杆11的安装结构,以及可以通过磁性的排斥力来对推动杆11进行拆卸,也可以通过顶触或触动的方式实现对推动杆11的拆卸,可以实现用户简单快速地来对推动杆11进行拆卸下,整体上降低了对推动杆11进行安装和拆卸的难度,降低了用户的操作强度,极大的提升了用户的使用体验效果。
67.本领域的普通技术人员可以理解,上述各实施方式是实现本实用新型的具体实施例,而在实际应用中,可以在形式上和细节上对其作各种改变,而不偏离本实用新型的精神和范围,均在本实用新型的保护范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
