1.本实用新型涉及清理设备技术领域,具体涉及一种预焙阳极炭碗清理装置。
背景技术:
2.预焙阳极炭块(以下简称阳极炭块)在成型之后,需要焙烧工艺使自身硬度等达到要求。焙烧过程为保证产品质量,在炭块表面附着一层保护材料,故焙烧完成冷却之后炭块表面及炭碗形成不规则附着层,属于多余材料,需要去除。
3.现有去除炭碗内附着物的主要方法是:人工拿金刚石气动旋转刀具,对准炭碗位置之后,手动打开气动阀门,刀具旋转清理炭碗内部。清理过程现场会有大量粉尘,需要工人做好防护,例如口罩防护服,清洁剂等;炭碗数量多(3-6个)大小不一,深浅不一,人工需要更换刀具型号满足产品需要;刀具笨重易损,人工需要悬挂刀具至合适载具达到减轻劳动强度的目的,然操作过程仍然繁重;根据工人工作和使用习惯不同样式各异,也不方便统一管理,同时耗材数量和使用周期无法把控。
技术实现要素:
4.本实用新型的目的在于:针对现有技术的不足,而提供一种预焙阳极炭碗清理装置,该装置降低工人的劳动强度,保证去除后产品质量,保证生产耗材的管控。
5.为实现上述目的,本实用新型采用如下技术方案:
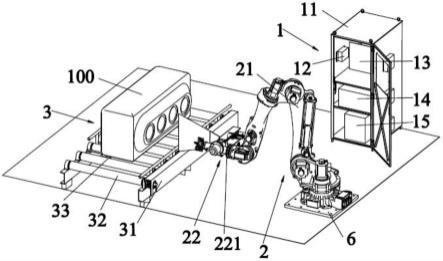
6.一种预焙阳极炭碗清理装置,包括控制柜、与所述控制柜电连接的多关节机器人及与所述多关节机器人对接的输送线,所述多关节机器人包括本体及设置于所述本体输出端的清理装置,所述清理装置包括防尘机构、设置于所述防尘机构内部的线扫描传感器及与所述防尘机构并排设置的清理刀具。
7.作为本实用新型所述的预焙阳极炭碗清理装置的一种改进,所述防尘机构包括盒体、设置于所述盒体的气缸及与所述气缸输出端连接的盖板,所述盖板与所述盒体结构匹配形成一个方形结构。
8.作为本实用新型所述的预焙阳极炭碗清理装置的一种改进,所述盒体连通有正气压输入装置,所述盒体设置有正气压进气口。
9.作为本实用新型所述的预焙阳极炭碗清理装置的一种改进,还包括法兰盘连接件,所述清理装置通过所述法兰盘连接件与所述本体连接。
10.作为本实用新型所述的预焙阳极炭碗清理装置的一种改进,还包括底座,所述底座与所述本体固定连接。
11.作为本实用新型所述的预焙阳极炭碗清理装置的一种改进,所述输送线包括机架、转动设置于所述机架的多根并排辊筒及设置于相邻所述辊筒间隙处的产品感应传感器。
12.作为本实用新型所述的预焙阳极炭碗清理装置的一种改进,所述控制柜包括柜体及设置于所述柜体的工控主机、工控显示器、控制系统、电源。
13.本实用新型的有益效果在于:本实用新型包括控制柜、与所述控制柜电连接的多关节机器人及与所述多关节机器人对接的输送线,所述多关节机器人包括本体及设置于所述本体输出端的清理装置,所述清理装置包括防尘机构、设置于所述防尘机构内部的线扫描传感器及与所述防尘机构并排设置的清理刀具。将需要清理的阳极炭碗放置于输送线上,通过控制柜控制多关节机器人工作,实现对阳极炭碗的清理,该装置大大降低工人的劳动强度,保证去除后产品质量,保证生产耗材的管控。
附图说明
14.此处所说明的附图用来提供对本实用新型的进一步理解,构成本实用新型的一部分,本实用新型的示意性实施方式及其说明用于解释本实用新型,并不构成对本实用新型的不当限定。在附图中:
15.图1为本实用新型的结构示意图;
16.图2为本实用新型的局部结构示意图。
具体实施方式
17.如在说明书及权利要求当中使用了某些词汇来指称特定组件。本领域技术人员应可理解,硬件制造商可能会用不同名词来称呼同一个组件。本说明书及权利要求并不以名称的差异来作为区分组件的方式,而是以组件在功能上的差异来作为区分的准则。如在通篇说明书及权利要求当中所提及的“包含”为一开放式用语,故应解释成“包含但不限定于”。“大致”是指在可接受的误差范围内,本领域技术人员能够在一定误差范围内解决所述技术问题,基本达到所述技术效果。
18.在本实用新型的描述中,需要理解的是,术语“上”、“下”、“前”、“后”、“左”、“右”、水平”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。
19.在本实用新型中,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”、“固定”等术语应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本实用新型中的具体含义。
20.以下结合附图对本实用新型作进一步详细说明,但不作为对本实用新型的限定。
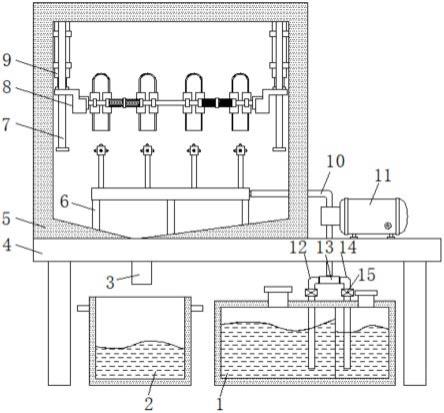
21.如图1~2所示,一种预焙阳极炭碗清理装置,包括控制柜1、与控制柜1电连接的多关节机器人2及与多关节机器人2对接的输送线3,多关节机器人2包括本体21及设置于本体21输出端的清理装置22,清理装置22包括防尘机构221、设置于防尘机构221内部的线扫描传感器222及与防尘机构221并排设置的清理刀具223,清理刀具223可以对阳极炭碗进行清理工作。防尘机构221包括盒体2211、设置于盒体2211的气缸2212及与气缸2212输出端连接的盖板2213,盖板2213与盒体2211结构匹配形成一个方形结构,气缸2212可以控制盖板2213的打开或关闭。盒体2211连通有正气压输入装置(图未示),盒体2211设置有正气压进气口4,正气压输入装置通过正气压进气口4与盒体2211,正气压进气口4的设置可以使得正
气压进入盒体2211,保证灰尘不容易在盒体2211打开或关闭时灰尘进入盒子内部。防尘机构221可以保护线扫描传感器免受撞击,避免灰尘侵扰,同时防尘机构还可以兼顾固定线扫描传感器222的作用。
22.优选地,本实用新型还包括法兰盘连接件5和底座6,清理装置22通过法兰盘连接件5与本体21连接,底座6与本体21固定连接,本体21一般通过螺栓与底座6固定连接,且底座6可以将多关节机器人固定在地上,起到固定多关节机器人2的作用。
23.优选地,输送线3包括机架31、转动设置于机架31的多根并排辊筒32及设置于相邻辊筒32间隙处的产品感应传感器33,感应炭块到达产品感应传感器33用于感应产品和传递相应信息。
24.优选地,控制柜1包括柜体及设置于柜体11的工控主机12、工控显示器13、控制系统14、电源15。
25.本实用新型的工作原理是:将焙烧完成的阳极炭碗100放置在输送线3上,由输送线3运输至相应位置,依据产品感应传感器33感应产品到达之后,系统控制输送线3的辊筒32停止运行;随后多关节机器人2携带线扫描传感器322以固定扫描轨迹及对每个产品扫描;同时清理装置32计算出阳极炭碗100中炭碗的数量和位置,炭碗的大小等需要数据回传至控制柜1,多关节机器人2依据打磨程序依次对每个炭碗进行清理工作,多关节机器人2清理完成之后,系统控制输送线3的辊筒32继续转动,由产品感应传感器33感应产品离开工作区,并等待下个产品进入工作区,从而完成相应清理工作。
26.上述说明示出并描述了本实用新型的若干优选实施方式,但如前所述,应当理解本实用新型并非局限于本文所披露的形式,不应看作是对其他实施方式的排除,而可用于各种其他组合、修改和环境,并能够在本文所述实用新型构想范围内,通过上述教导或相关领域的技术或知识进行改动。而本领域人员所进行的改动和变化不脱离本实用新型的精神和范围,则都应在本实用新型所附权利要求的保护范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。