1.本实用新型涉及隧道检测装置,尤其涉及一种手推式地铁隧道图像采集装置。
背景技术:
2.地铁隧道基础结构受施工质量缺陷、材料老化、列车振动、周边工程活动等多种内外因素的影响,在运营期会出现结构病害,如渗漏水、衬砌裂缝、衬砌掉块、接缝张开、管片错台等。此外地铁隧道沿线安装的箱体、线缆、管道、接触网、轨道等设备设施的表面状态,如箱体门打开、螺丝松脱、线缆侵限、扣件松脱等,以及由于各种原因遗留在隧道内的异物。这些结构病害、设备设施异常状态、异物等,成为地铁行车安全的重大隐患。因此,及时检测并发现隧道缺陷十分重要。
3.而目前地铁隧道的巡检和安全防护主要以人工静态检查为主,少量动态检测车为辅的形式完成。人工静态检查的优点是技术成熟可靠,但具有较大的主观性,即使经验丰富的检测人员也难以保证检测结果的完整性与准确性,同时也无法全程记录检测过程中隧道沿线设备设施的状态,无法为后续的异常缺陷分析提供数据支持。而动态检测车由于体型大、数量有限、需要专门调度、检测区间隧道内不能有其他专业人员等原因,一般只适用于长周期、固定周期的检测,无法用于高频次的例行检测。随着地铁运营里程、运营时长的不断增大,检测工作量也不断增大,检测窗口时间不断减少,现有的检测方式难以满足检测需要。
技术实现要素:
4.有鉴于此,有必要提供一种方便快捷、便于查找分析的手推式地铁隧道图像采集装置。
5.一种手推式地铁隧道图像采集装置,用于360
°
连续采集地铁隧道沿线表面状态,包括走行组件、控制组件、监测组件和采集组件,所述控制组件、监测组件和采集组件安装在走行组件上并通过走行组件进行隧道巡检,所述监测组件包括测速件和plc组件,所述采集组件包括安装件和多个采集件,多个所述采集件分别阵列式安装在安装件上形成弧线型阵列,多个所述采集件分别连接控制组件和plc组件,所述测速件采集运行信息并转换成脉冲信号发送给plc组件,所述plc组件将脉冲信号传输给控制组件以触发多个采集件进行360
°
图像采集,所述plc组件将脉冲信号传输给多个所述采集件以触发多个所述采集件的采集频率。
6.进一步地,所述走行组件包括运输件和推动件,所述运输件在推动件的推动下在轨道上运行。
7.进一步地,所述控制组件包括电脑主机和触控显示屏,所述触控显示屏连接电脑主机。
8.进一步地,所述测速件包括测速轮和旋转编码器。
9.进一步地,所述测速轮安装在运输件上并跟随运输件转动,所述旋转编码器安装
在测速轮上,所述旋转编码器对测速轮转动状态进行采集并转换成脉冲信号持续传输给plc组件。
10.进一步地,所述plc组件包括plc模块和连接件。
11.进一步地,所述plc模块通过连接件分别连接电脑主机和多个采集件,所述plc模块将脉冲信号持续传输给电脑主机以传输测速件的运行方向、实时车速、运行距离。
12.进一步地,所述plc模块接收脉冲信号并将脉冲信号持续传输给多个采集件,多个所述采集件接收脉冲信号,多个所述采集件的采集频率由脉冲信号触发控制防止图像失真。
13.进一步地,所述安装件包括安装板,所述安装板呈弧线型,所述安装板上设置有轨道全景图像区、钢轨图像区和隧道壁图像区。
14.进一步地,多个所述采集件包括轨道全景相机、钢轨相机和隧道壁相机,所述轨道全景相机、钢轨相机和隧道壁相机分别阵列安装在轨道全景图像区、钢轨图像区和隧道壁图像区上采集轨道全景图像、钢轨表面图像和隧道壁图像。
15.本实用新型通过推动所述走行组件带动控制组件、监测组件和采集组件在轨道上移动,所述测速件采集运行信息并转换成脉冲信号持续传输给plc组件,所述plc组件将脉冲信号分别传输给控制组件和采集组件,所述控制组件将脉冲信号转换成运行方向、实时车速、运行距离等信息,所述控制组件控制多个采集件进行360
°
图像采集,多个所述采集件的采集频率由脉冲信号触发控制。
附图说明
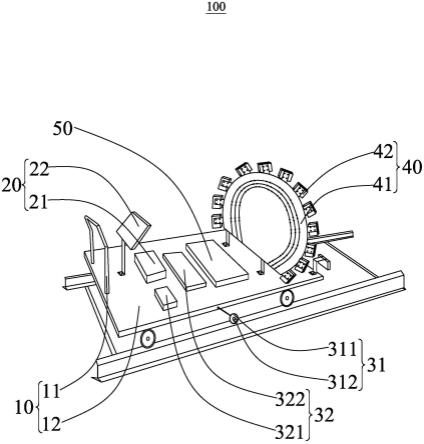
16.图1是本实用新型实施例手推式地铁隧道图像采集装置的立体结构示意图。
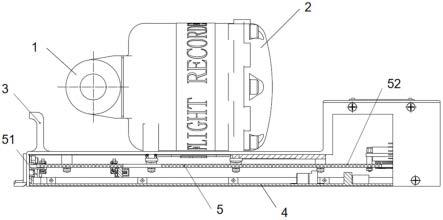
17.图2是本实用新型实施例手推式地铁隧道图像采集装置的俯视结构示意图。
18.图3是本实用新型实施例手推式地铁隧道图像采集装置的相机阵列结构示意图。
具体实施方式
19.请参考图1、图2和图3显示的一种手推式地铁隧道图像采集装置,用于360
°
连续采集地铁隧道沿线表面状态,包括走行组件10、控制组件20、监测组件30和采集组件40,所述控制组件20、监测组件30和采集组件40安装在走行组件10上并通过走行组件10进行隧道巡检,所述监测组件30包括测速件31和plc组件32,所述采集组件40包括阵列式安装件41和多个采集件42,多个所述采集件42分别阵列式安装在安装件上形成弧线型阵列,多个所述采集件42分别连接控制组件20和plc组件32,所述控制组件20将脉冲信号转换成运行方向、实时车速、运行距离等信息,所述测速件31采集运行信息并转换成脉冲信号发送给plc组件32,所述plc组件32将脉冲信号传输给控制组件20以触发多个采集件42进行360
°
图像采集,所述plc组件32将脉冲信号传输给多个所述采集件42以触发多个所述采集件42的采集频率。
20.具体地,所述走行组件10包括轨道小车11和手推柄12,所述手推柄12安装在轨道小车11上,所述轨道小车11在手推柄12的推动下在轨道上运行。
21.具体地,所述控制组件20包括电脑主机21和触控显示屏22,所述电脑主机21和触控显示屏22嵌入安装在轨道小车11上,所述电脑主机21安装有图像采集软件,通过所述图
像采集软件对采集的图像进行处理,所述触控显示屏22支持触摸操控,所述触控显示屏22连接电脑主机21,通过所述触控显示屏22操控电脑主机实现图像采集控制、图像显示控制和设备运行状态检测显示。
22.具体地,所述测速件31包括测速轮311和旋转编码器312,所述测速轮311安装在轨道小车11上跟随轨道小车11一起运动,所述测速轮311旋转一周,对应的旋转编码器312输出固定数量的脉冲数,所述测速轮311直径固定,因此根据采样时间与该采样时间内输出的脉冲数,可以测算出采样时间内的运行距离,进而可以算出运行速度,对各采样时间内的运行距离进行累加,即可算出总的运行距离,即相对于所述采集组件40开始采集时的偏移位置。
23.具体地,所述测速轮311安装在轨道小车11上并跟随轨道小车11运动,所述旋转编码器312安装在测速轮311上,所述旋转编码器312对测速轮311转动状态进行采集并转换成脉冲信号持续传输给plc组件32。
24.具体地,所述plc组件32包括plc模块321和网络交换机322。
25.具体地,所述plc模块321通过网络交换机322分别连接电脑主机和多个采集件42,通过所述plc模块321实时采集旋转编码器312的脉冲数据,所述plc模块321将脉冲信号持续传输给电脑主机以传输测速件31的运行方向、实时车速、运行距离等。
26.具体地,所述plc模块321接收脉冲信号并将脉冲信号持续传输给多个采集件42,所述plc模块321将该脉冲数据转换成触发脉冲,所述脉冲触发采集组件40的采集动作,多个所述采集件42接收脉冲信号,多个所述采集件的采集频率由脉冲信号触发控制防止图像失真。
27.具体地,所述采集组件40采取模块化设计,所述安装件41包括安装板41,所述安装板41呈弧线型并与隧道拱形一致,所述安装板41固定在轨道小车11前端,所述安装板41设置有轨道全景图像区411、左右钢轨图像区412和隧道壁图像区413。
28.具体地,多个所述采集件42包括轨道全景相机421、钢轨相机422和隧道壁相机423,所有相机的类型都为线阵相机,所述轨道全景相机421、钢轨相机422和隧道壁相机423分别阵列安装在轨道全景图像区411、左右钢轨图像区412和隧道壁图像区413上,分别用于采集轨道全景图像、左右钢轨表面图像和隧道壁图像,所述轨道全景相机421检测轨行区整体状态、异物等,所述钢轨相机422检测钢轨磨耗、擦伤、断裂、扣件松脱、缺失等缺陷,所述隧道壁相机423检测隧道沿线安装的箱体、线缆、管道、接触网、轨道等设备设施的表面状态,如箱体门打开、螺丝松脱、线缆侵限、扣件松脱等。
29.具体地,还包括电池模块50,所述电池模块50嵌入安装在轨道小车11上,所述电池模块50用于给控制组件20、监测组件30和采集组件40供电。
30.本实用新型通过推动所述走行组件10带动控制组件20、监测组件30和采集组件40在轨道上移动,所述测速件31采集运行信息并转换成脉冲信号持续传输给plc组件32,所述plc组件32将脉冲信号分别传输给控制组件20和采集组件40,所述控制组件20对采集组件40进行控制,实现360
°
图像采集。
31.需要说明的是,本实用新型并不局限于上述实施方式,根据本实用新型的创造精神,本领域技术人员还可以做出其他变化,这些依据本实用新型的创造精神所做的变化,都应包含在本实用新型所要求保护的范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。