一种基于5g技术的医用智能腕带及数据处理方法
技术领域
1.本发明涉及医疗技术领域,具体涉及一种基于5g技术的医用智能腕带及数据处理方法。
背景技术:
2.医用腕带,又叫医疗识别带,是腕带的一种,主要用于医疗领域,医疗腕带可提供病人识别信息,是国家卫生部最新要求的版面内容项目,其内容包括:姓名、性别、床号、住院号及其它医疗特别要求的信息,主要是医院对病人进行标识的有效工具,市场上的各种医用都有使用简单,扣子牢固,不易脱落,佩戴舒适,颜色多样、样式新颖美观的特点,医用腕带在各大小医院广泛使用,传统的医用腕带结构简单,功能单一。
3.现有的医用智能腕带增加了二维码扫描、定位等功能,医用智能腕带通过对准药品的二维码进行扫描以记录患者的用药记录,但是现有技术中医用智能腕带准确扫描药品的信息需要腕带维持在药品二维码的固定范围内,对应手臂不方便的患者需要从旁协助才能实现药品使用的记录,实用性较差。
技术实现要素:
4.为此,本发明提供一种基于5g技术的医用智能腕带及数据处理方法,有效的解决了现有技术中的医用腕带使用时需要腕带维持在药品二维码的固定范围内不方便手臂不方便的患者使用的问题。
5.为解决上述技术问题,本发明具体提供下述技术方案:一种基于5g技术的医用智能腕带,具备:
6.腕带本体,具备安装外壳和腕侧带,所述腕侧带设置在所述安装外壳的两侧;
7.智能系统,设置在所述安装外壳内部,所述智能系统具备扫描模块、定位模块、通讯模块、控制模块以及显示屏,所述扫描模块通过第一通讯线连接在所述通讯模块上,所述定位模块通过第二通讯线连接在所述通讯模块上,所述第一通讯线通过拉紧组件安装在所述安装外壳,且使得所述第一通讯线持续处于拉紧状态,所述通讯模块上通过连接线缆连接在所述显示屏上,所述通讯模块与所述控制模块通讯连接,所述扫描模块将采集到的二维码图像数据通过所述通讯模块传至所述控制模块,所述定位模块将采集到的实时位置数据通过所述通讯模块传至所述控制模块;
8.偏移驱动装置,设置在所述安装外壳内,所述扫描模块通过所述偏移驱动装置安装在所述安装外壳内,所述偏移驱动装置用于带动所述扫描模块改变方位以采集到部分与所述扫描模块采集范围偏离一定角度的二维码;
9.其中,所述偏移驱动装置包括设置在所述安装外壳内的内驱动组件、以及均匀设置在所述扫描模块下方的升降带动组件,所述内驱动组件用于驱动,以带动需要调整方位对应的所述升降带动组件升降,所述升降带动组件受所述内驱动组件驱动带动所述扫描模块下端面位于对立面的两点向相反的方向移动,以使得所述扫描模块按照预定的调整方位
发生倾斜。
10.作为本发明的优选方案,所述安装外壳内设置有分别供所述扫描模块、所述定位模块和所述显示屏安装的外环安装间、内环上安装间和内环下安装间,所述内驱动组件和所述升降带动组件均设置在所述外环安装间内。
11.作为本发明的优选方案,所述升降带动组件包括设置在所述扫描模块下方以及在所述外环安装间内的倾斜安装座、设置在所述倾斜安装座内的下置槽、转动设置在所述下置槽内的转动轴杆、以及设置在所述转动轴杆下端的传动座;
12.所述转动轴杆上下端均通过万向转球转动设置在所述下置槽内和所述传动座上;
13.所述倾斜安装座上侧端面均匀设置有限位槽,所述外环安装间内壁上均匀设置有限位板,所述限位板延伸至所述限位槽内的中间位置,所述限位板的宽度与所述限位槽的宽度一致。
14.作为本发明的优选方案,所述内驱动组件包括设置在所述外环安装间内的驱动环座、均匀设置在所述驱动环座内的驱动区间、以及滑动设置在所述驱动区间内的齿轮弧板;
15.所述传动座固定设置在所述齿轮弧板上,所述驱动区间侧边开设有开口,所述齿轮弧板侧边延伸至所述开口外部,所述驱动环座下方设置有传动环座,所述传动环座内两端部上设置有第一驱动电机,所述第一驱动电机输出端连接有传动齿轮,所述传动齿轮与所述齿轮弧板啮合;
16.所述传动环座的半径大于所述驱动环座的半径,所述传动环座下端连接有第二驱动电机,所述第一驱动电机和所述第二驱动电机均与所述控制模块电性连接。
17.作为本发明的优选方案,所述第一通讯线连接在所述扫描模块的正下方,所述拉紧组件包括设置在所述外环安装间和所述内环上安装间及所述内环下安装间之间的连接壁、设置在所述连接壁内的空腔、以及横向滑动设置在所述空腔内的若干个拉紧轴;
18.所述空腔内设置有供所述拉紧轴两端滑动的滑动槽,所述拉紧轴其中一端通过弹簧连接在所述滑动槽内,所述第一通讯线从上到下呈“s”形穿过所述拉紧轴,并延伸至所述内环下安装间内。
19.作为本发明的优选方案,所述扫描模块包括设置在所述外环安装间内的抓拍采样组件、以及连接在所述抓拍采样组件上的图像传感器;
20.所述抓拍采样组件用于采集二维码图像光信号,并将二维码图像光信号传送至图像传感器,所述图像传感器将二维码图像光信号转换为相应比例关系的数字信号通过通过所述通讯模块传输至控制模块。
21.作为本发明的优选方案,所述控制模块包括第一数据处理单元、第二数据处理单元、以及控制单元;
22.所述第一数据处理单元用于解码所述图像传感器输送的数字信号,并在解码异常的情况下向所述控制单元发送解码异常信号,所述控制单元根据所述解码异常信号向所述第二数据处理单元发送二次处理指令,所述第二数据处理单元根据二次处理指令对所述数字信号进行二次处理并分析,以及将分析结果传输至所述控制单元,所述控制单元根据分析结果向所述偏移驱动装置发送驱动指令。
23.作为本发明的优选方案,所述第二数据处理单元将获得的数字信号处理得出图像坐标系,并计算二维码区域与图像坐标系中心点的连线的偏移角度值,并将所述偏移角度
值传输至所述控制单元,所述控制单元根据所述偏移角度值对应向所述第一驱动电机、第二驱动电机发送驱动指令。
24.作为本发明的优选方案,所述控制模块通讯连接有上位机,所述控制模块将接收到的实时位置数据、以及将所述图像传感器输送的数字信号成功解码情况下的解码结果传输至所述上位机。
25.作为本发明的优选方案,一种基于5g技术的医用智能腕带的数据处理方法,包括以下步骤:
26.步骤100,扫描模块采集进入扫描范围内的药品二维码并将二维码图像光信号转换为数字信号,定位模块采集实时位置数据,并通过通讯模块传输至控制模块;
27.步骤200,控制模块将实时位置数据传输至上位机,第一数据处理单元解码数字信号,并将数字信号成功解码的解码结果传输至上位机,以及在数字信号解码异常情况下执行步骤300;
28.步骤300,第一数据处理单元向控制单元发送解码异常信号,控制单元根据解码异常信号向第二数据处理单元发送二次处理指令,第二数据处理单元根据二次处理指令对数字信号进行二次处理并分析得出角度偏移值,以及将角度偏移值传输至控制单元;
29.步骤400,控制单元根据角度偏移值向偏移驱动装置发送对应驱动参数的驱动指令。
30.本发明与现有技术相比较具有如下有益效果:
31.本发明设置扫描模块对药品的二维码进行扫描,并通过控制模块进行解码判定和在解码异常情况下分析偏移角度值,以及根据偏移角度值控制偏移驱动装置以使得扫描模块偏移一定角度,实现扫描模块能够采集到部分与扫描模块采集范围偏离一定角度的二维码,增大了扫描模块的扫描范围,提高了实用性。
附图说明
32.为了更清楚地说明本发明的实施方式或现有技术中的技术方案,下面将对实施方式或现有技术描述中所需要使用的附图作简单地介绍。显而易见地,下面描述中的附图仅仅是示例性的,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据提供的附图引伸获得其它的实施附图。
33.图1为本发明实施例提供的一种基于5g技术的医用智能腕带的结构示意图;
34.图2为本发明实施例中的外环安装间的内部结构示意图;
35.图3为本发明实施例中的安装外壳的俯视结构示意图;
36.图4为本发实施例中的偏移驱动装置的部分结构示意图;
37.图5为本发明实施例中的驱动环座的俯视结构示意图;
38.图6为本发明实施例提供的一种基于5g技术的医用智能腕带的结构框图;
39.图7为本发明实施例提供的一种基于5g技术的医用智能腕带的数据处理方法的流程图。
40.图中的标号分别表示如下:
41.1-安装外壳;2-腕侧带;3-扫描模块;4-定位模块;5-通讯模块;6-控制模块;7-显示屏;8-偏移驱动装置;9-拉紧组件;10-第一通讯线;11-第二通讯线;12-连接线缆;13-外
环安装间;14-内环上安装间;15-内环下安装间;16-上位机;17-腕带本体;18-智能系统;
42.31-抓拍采样组件;32-图像传感器;
43.61-第一数据处理单元;62-第二数据处理单元;63-控制单元;
44.81-内驱动组件;82-升降带动组件;
45.91-连接臂;92-空腔;93-拉紧轴;94-滑动槽;95-弹簧;
46.811-驱动环座;812-驱动区间;813-齿轮弧板;814-开口;815-传动环座;816-第一驱动电机;817-传动齿轮;818-第二驱动电机;
47.821-倾斜安装座;822-下置槽;823-转动轴杆;824-传动座;825-万向转球;826-限位槽;827-限位板。
具体实施方式
48.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
49.如图1和图6所示,本发明提供了一种基于5g技术的医用智能腕带及数据处理方法,设置扫描模块3对药品的二维码进行扫描,并通过控制模块6进行解码判定和在解码异常情况下分析偏移角度值,以及根据偏移角度值控制偏移驱动装置8以使得扫描模块3偏移一定角度,实现扫描模块3能够采集到部分与扫描模块3采集范围偏离一定角度的二维码,增大了扫描模块3的扫描范围,提高了实用性。
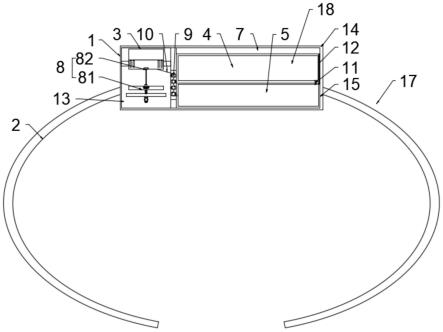
50.本发明具备腕带本体17、智能系统18和偏移驱动装置8,腕带本体17,具备安装外壳1和腕侧带2,腕侧带2设置在安装外壳1的两侧,智能系统18设置在安装外壳1内部,智能系统18具备扫描模块3、定位模块4、通讯模块5、控制模块6以及显示屏7,偏移驱动装置8用于带动扫描模块3改变方位以采集到部分与扫描模块3采集范围偏离一定角度的二维码。
51.为了对扫描模块3和定位模块4采集到的数据进行传输,扫描模块3通过第一通讯线10连接在通讯模块5上,定位模块4通过第二通讯线11连接在通讯模块5上,第一通讯线10通过拉紧组件9安装在安装外壳1,且使得第一通讯线10持续处于拉紧状态,通讯模块5上通过连接线缆12连接在显示屏7上,通讯模块5与控制模块6通讯连接,扫描模块3将采集到的二维码图像数据通过通讯模块5传至控制模块6,定位模块4将采集到的实时位置数据通过通讯模块5传至控制模块6,定位模块4将采集到的实时位置数据通过通讯模块5传至控制模块6,其中第一通讯线10、第二通讯线11、连接线缆12均用于数据传输。
52.本发明主要通过偏移驱动装置8带动扫描模块3的角度偏移以增大扫描模块3的采集范围,因此,本发明的偏移驱动装置8主要采取以下优选实施例,如图2、图3、图4和图5所示,偏移驱动装置8包括设置在安装外壳1内的内驱动组件81、以及均匀设置在扫描模块3下方的升降带动组件82,内驱动组件81用于驱动带动需要调整方位对应的升降带动组件82升降,升降带动组件82受内驱动组件81驱动带动扫描模块3下端面位于对立面的两点向相反的方向移动以使得扫描模块3按照预定的调整方位发生倾斜。
53.为了在安装外壳1内分区间安装扫描模块3、定位模块4、通讯模块5和显示屏7,安装外壳1内设置有分别供扫描模块3、定位模块4和显示屏7安装的外环安装间13、内环上安
装间14和内环下安装间15,其中内环下安装间15可同时安装通讯模块5,内驱动组件81和升降带动组件82均设置在外环安装间13内。
54.其中,升降带动组件82受内驱动组件81驱动带动扫描模块3下端面位于对立面的两点向相反的方向移动以使得扫描模块3按照预定的调整方位发生倾斜,本发明的升降带动组件82主要采取以下优选实施例,如图2所示,升降带动组件82包括设置在扫描模块3下方以及在外环安装间13内的倾斜安装座821、设置在倾斜安装座821内的下置槽822、转动设置在下置槽822内的转动轴杆823、以及设置在转动轴杆823下端的传动座824,转动轴杆823上下端均通过万向转球825转动设置在下置槽822内和传动座824上。
55.在上述实施例中,正常情况下传动座824会通过转动轴杆823带动倾斜安装座821在水平方向上转动从而带动扫描模块3在水平方向上转动,缺少对倾斜安装座821的限位作用使得扫描模块3无法跟随着进行竖直转动,因此本发明对倾斜安装座821进行限位:倾斜安装座821上侧端面均匀设置有限位槽826,外环安装间13内壁上均匀设置有限位板827,限位板827延伸至限位槽826内的中间位置(如图3所示),限位板826的宽度与限位槽826的宽度一致。
56.本实施例中,在传动座824转动的情况下,倾斜安装座821受到限位板827的限位作用无法水平方向上转动,因此,在传动座824转动的情况下带动转动轴杆823发生倾斜,从而通过万向转球825带动上方的倾斜安装座821下移,从而使得倾斜安装座821一侧边发生倾斜,此时扫描模块3发生倾斜,从而使得扫描模块3的扫描范围发生改变。
57.为了根据预设的偏移角度带动对应传动座824的转动,本发明设置了内驱动组件,本发明的内驱动组件81主要采取以下优选实施例,如图4和图5所示,内驱动组件81包括设置在外环安装间13内的驱动环座811、均匀设置在驱动环座811内的驱动区间812、以及滑动设置在驱动区间812内的齿轮弧板813,传动座824固定设置在齿轮弧板813上,驱动区间812侧边开设有开口814,齿轮弧板813侧边延伸至开口814外部,驱动环座811下方设置有传动环座815,传动环座815内两端部上设置有第一驱动电机816,第一驱动电机816输出端连接有传动齿轮817,传动齿轮817与齿轮弧板813啮合。
58.内驱动组件81的驱动带动过程为,第一驱动电机816运行带动传动齿轮817转动,传动齿轮817带动齿轮弧板813转动,从而带动传动座824转动,传动座824转动带动转动轴杆823发生倾斜,从而拉动倾斜安装座821一侧向下移动,实现带动扫描模块3发生倾斜。
59.上述实施例中,为了使得传动齿轮817和第一驱动电机816在齿轮弧板813的外侧,需要使得传动环座817的半径大于驱动环座811的半径。
60.另外,本实施例中带动不同传动座824转动即是对应扫描模块3进行不同方向的倾斜,为了根据实际二维码偏离情况调节扫描模块3的倾斜方向,在传动环座817下端连接有第二驱动电机818,第一驱动电机816和第二驱动电机818均与控制模块6电性连接,也就是说,受控制模块6控制,第二驱动电机818转动将传动齿轮817转动至预设倾斜方向对应的传动座824的侧边,此时驱动第一驱动电机816即可带动对应的传动座824转动从而带动扫描模块3向预设的角度倾斜。
61.为了使得第一通讯线10在偏移驱动装置8角度调整的过程中缠绕在偏移驱动装置8上,需要通过拉紧组件9将第一通讯线10拉紧始终处于紧绷状态,第一通讯线10连接在扫描模块3的正下方,其中,拉紧组件9主要采取以下优选实施例,拉紧组件9包括设置在外环
安装间13和内环上安装间14及内环下安装间15之间的连接壁91、设置在连接壁91内的空腔92、以及横向滑动设置在空腔92内的若干个拉紧轴93,空腔92内设置有供拉紧轴93两端滑动的滑动槽94,拉紧轴93其中一端通过弹簧95连接在滑动槽94内,第一通讯线10从上到下呈“s”形穿过拉紧轴93,并延伸至内环下安装间15内。
62.拉紧组件9的拉紧原理为,当扫描模块3需要向左倾斜时,第一通讯线10向外拉拽,上端的拉紧轴93在滑动槽94内向左滑动,避免第一通讯线10的过度拉紧,当扫描模块3需要向右倾斜时,第一通讯线10逐渐宽松,上端的拉紧轴93在滑动槽94内向右滑动,使得第一通讯线10持续处于拉紧状态。
63.本发明通过扫描模块3对药品二维码进行采集,扫描模块3主要采取以下优选实施例,扫描模块3包括设置在外环安装间13内的抓拍采样组件31、以及连接在抓拍采样组件31上的图像传感器32,抓拍采样组件31用于采集二维码图像光信号,并将二维码图像光信号传送至图像传感器32,本实施例中的抓拍采样组件31设置在倾斜安装座821上,本发明中的偏移驱动装置8主要是对抓拍采样组件31进行角度调整,图像传感器32将二维码图像光信号转换为相应比例关系的数字信号通过通过通讯模块5传输至控制模块6,图像传感器32可设置在抓拍采样组件31的下方。
64.本发明的控制模块6主要用于数据处理、数据传输和驱动控制,控制模块6主要采取以下优选实施例,控制模块6包括第一数据处理单元61、第二数据处理单元62、以及控制单元63,第一数据处理单元61用于解码图像传感器32输送的数字信号,并在解码异常的情况下向控制单元63发送解码异常信号,控制单元63根据解码异常信号向第二数据处理单元62发送二次处理指令,第二数据处理单元62根据二次处理指令对数字信号进行二次处理并分析,以及将分析结果传输至控制单元63,控制单元63根据分析结果向偏移驱动装置8发送驱动指令。
65.上述实施例中第二数据处理单元62的数据分析过程为,第二数据处理单元62将获得的数字信号处理得出图像坐标系,并计算二维码区域与图像坐标系中心点的连线的偏移角度值,并将偏移角度值传输至控制单元63,控制单元63根据偏移角度值对应向第一驱动电机816、第二驱动电机818发送驱动指令;例如,在本实施例中分析得出的偏移角度值为120
°
时,控制单元63就需要控制第二驱动电机818转动带动第一驱动电机816转动至第一驱动电机816到传动环座815中心点的连线的角度为-60
°
的位置,此时第一驱动电机816驱动直接带动在-60
°
的位置发生角度偏移,具体偏移的角度可视实际情况而定(可根据外环安装间13内的预留位置确定)。
66.另外,在本发明中,控制模块6通讯连接有上位机16,控制模块6将接收到的实时位置数据、以及将图像传感器32输送的数字信号成功解码情况下的解码结果传输至上位机16,从上位机16可直接看出患者药品的使用情况和患者的位置信息。
67.综上所述,如图7所示,本发明提供的一种基于5g技术的医用智能腕带的数据处理方法,包括以下步骤:
68.步骤100,扫描模块3采集进入扫描范围内的药品二维码并将二维码图像光信号转换为数字信号,定位模块4采集实时位置数据,并通过通讯模块5传输至控制模块6;
69.步骤200,控制模块6将实时位置数据传输至上位机16,第一数据处理单元61解码数字信号,并将数字信号成功解码的解码结果传输至上位机16,以及在数字信号解码异常
情况下执行步骤300;
70.步骤300,第一数据处理单元61向控制单元63发送解码异常信号,控制单元63根据解码异常信号向第二数据处理单元62发送二次处理指令,第二数据处理单元62根据二次处理指令对数字信号进行二次处理并分析得出角度偏移值,以及将角度偏移值传输至控制单元63;
71.步骤400,控制单元63根据角度偏移值向偏移驱动装置8发送对应驱动参数的驱动指令。
72.以上实施例仅为本技术的示例性实施例,不用于限制本技术,本技术的保护范围由权利要求书限定。本领域技术人员可以在本技术的实质和保护范围内,对本技术做出各种修改或等同替换,这种修改或等同替换也应视为落在本技术的保护范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。