1.本实用新型用于灯具领域,特别是涉及一种灯光控制器。
背景技术:
2.现场演出过程中,灯光师需要及时给在舞台中经常运动的演员提高明亮度并进行其他舞台灯光渲染,可通过追光灯控制器远程操控追光灯以调节出光方向,但是传统的追光灯控制器在操作过程中存在稳定性差和控制紊乱的问题,追光灯与追光灯控制器一体设计,整体结构笨重,追光灯散热会影响灯光师,操作不便且体验不佳;在驱动把手被握持状态下,灯光师摆动驱动把手,但编码器并未采集运动信息,驱动把手与编码器的传动关系不稳定导致光斑与控制动作不同步,此外,由于结构笨重,摆动时偏移过大,且容易发生手臂疲劳;在驱动把手脱离握持状态下,由于灯光控制器自身配重导致驱动把手自发地产生偏移,导致光斑在非主动控制下发生移动;连接轴的结构在使用中不稳固,容易发生晃动,导致与连接轴固定连接的驱动把手也发生晃动,从而使采集的控制信息不准确。
技术实现要素:
3.本实用新型的目的在于至少解决现有技术中存在的技术问题之一,提供一种灯光控制器,能够避免出现光斑与控制动作不同步、控制紊乱、结构笨重且稳定性差的问题。
4.本实用新型解决其技术问题所采用的技术方案是:一种灯光控制器,包括
5.控制箱,具有第一信息采集模块、第二信息采集模块和转动信号处理模块,所述第一信息采集模块和所述第二信息采集模块均与所述转动信号处理模块控制连接;
6.基座,所述基座与所述控制箱通过第一转动部件连接;
7.驱动把手,所述驱动把手与所述控制箱通过第二转动部件连接;
8.所述第一信息采集模块与所述第一转动部件传动连接,所述第二信息采集模块与所述第二转动部件传动连接。
9.上述技术方案中至少具有如下优点或有益效果:转动控制箱进行灯光调节的过程中,控制箱会与第一信息采集模块一起做圆周运动,同时第一信息采集模块会与第一转动部件之间相对传动,控制箱转动的角度能够被第一信息采集模块收集并转化为电信号,然后传输给转动信号处理模块,同理,第二信息采集模块能够将驱动把手的转动信号收集并转为电信号传输给转动信号处理模块,这样使得转动信号处理模块能够及时响应控制箱以及驱动把手的转动变化信息,此外,该灯光控制器的结构能够避免出现光斑与控制动作不同步的问题,操作稳定性好。
附图说明
10.下面结合附图对本实用新型作进一步说明:
11.图1是本实用新型一个实施例的结构示意图;
12.图2是图1所示实施例的部分结构爆炸图;
13.图3是图1所示实施例的部分结构爆炸图;
14.图4是图1所示实施例中第一转动部件与第一信息采集模块连接状态的结构示意图;
15.图5是图4的爆炸图;
16.图6是图1所示实施例中控制箱与第二信息采集模块的连接关系示意图;
17.图7是图6的爆炸图;
18.图8是图1所示实施例中驱动把手的结构示意图;
19.图9是图8的爆炸图;
20.图10是本实用新型一个实施例的连接杆的结构示意图。
21.图11是图1所示实施例中连接件的结构示意图;
22.图12是图1所示实施例中连接件的另一视角结构示意图;
23.图13是图1所示实施例中第一锁紧件的爆炸图;
24.图14是图1所示实施例中第二锁紧件的爆炸图;
25.图15是图1所示实施例中第二杆件的结构示意图。
具体实施方式
26.本部分将详细描述本实用新型的具体实施例,本实用新型之较佳实施例在附图中示出,附图的作用在于用图形补充说明书文字部分的描述,使人能够直观地、形象地理解本实用新型的每个技术特征和整体技术方案,但其不能理解为对本实用新型保护范围的限制。
27.本实用新型中,如果有描述到方向(上、下、左、右、前及后)时,其仅是为了便于描述本实用新型的技术方案,而不是指示或暗示所指的技术特征必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。
28.本实用新型中,“若干”的含义是一个或者多个,“多个”的含义是两个以上,“大于”“小于”“超过”等理解为不包括本数;“以上”“以下”“以内”等理解为包括本数。在本实用新型的描述中,如果有描述到“第一”“第二”仅用于区分技术特征为目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量或者隐含指明所指示的技术特征的先后关系。
29.本实用新型中,除非另有明确的限定,“设置”“安装”“连接”等词语应做广义理解,例如,可以是直接相连,也可以通过中间媒介间接相连;可以是固定连接,也可以是可拆卸连接,还可以是一体成型;可以是机械连接,也可以是电连接或能够互相通讯;可以是两个元件内部的连通或两个元件的相互作用关系。所属技术领域技术人员可以结合技术方案的具体内容合理确定上述词语在本实用新型中的具体含义。
30.此外,下面所描述的本实用新型各个实施方式中所涉及到的技术特征只要彼此之间未构成冲突就可以相互组合。
31.参见图1、图2、图3、图6、图7,本实用新型提供了一种灯光控制器,其主要包括控制箱1、基座4和驱动把手5。
32.控制箱1具有第一信息采集模块2、第二信息采集模块8和转动信号处理模块010,第一信息采集模块2和第二信息采集模块8均与转动信号处理模块010控制连接。
33.基座4与控制箱1通过第一转动部件3连接,驱动把手5通过第二转动部件82安装在控制箱1上,第一信息采集模块2与第一转动部件3传动连接,第二信息采集模块8与第二转动部件82传动连接。
34.具体的,基座4的内部中间设有支座040,第一转动部件3固定安装在支座040上。
35.基座4的侧面设有网络信号接口、控制信号输入/输出接口、电源输入接口、视频数据传输接口、电源控制开关,这样不需要将这些开口设在控制箱1侧面用于布置线路,避免灯光控制器在转动时线束相互缠绕。
36.基座4内部设有信号数据处理器,信号数据处理器与转动信号处理模块010连接,这样不需要在控制箱1内安装信号数据处理器,从而减轻控制箱1的重量,不必考虑控制箱1内部重力分配,操作过程也更加平稳,而且避免在无人操作时因控制箱1自身重力而改变位置,同时整个装置的重心都在基座4上,整体装置的稳定性也更高。
37.参见图6、图7,控制箱1包括箱体011、第一侧板012和第二侧板013,箱体011为两侧敞口的结构,第一侧板012和第二侧板013分别安装在箱体011的两侧敞口端,转动信号处理模块010安装在箱体011的顶部。
38.进一步的,第一侧板012和第二侧板013分别可拆卸安装在箱体011的两侧,这样方便控制箱1的拆装,在控制箱1内布置线路时更加方便。
39.参见图4、图5,第一转动部件3包括转轴030和轴承组件031,轴承组件031固定在基座4上。
40.转轴030的一端与控制箱1固定连接,转轴030的另一端伸入轴承组件031内部与轴承内圈固定连接。
41.具体的,轴承组件031包括轴承座和轴承,轴承安装在轴承座内部,轴承座竖向安装在基座4中间的支座040上。
42.在一些实施例中,转轴030的一端通过法兰130固定在控制箱1的下侧,转轴030的另一端穿设在轴承组件031内部并与轴承的内圈固定连接。
43.为了防止转轴030与轴承配合固定之后转轴030与轴承出现相对滑动,在一些实施例中,转轴030远离法兰130的一端设有装配槽,转轴030靠近法兰130的一端设有台阶,装配槽中用于装配轴承挡圈131,当转轴030穿设到轴承内部之后,转轴030的外表面与轴承的内圈配合,同时轴承的内圈卡紧在轴承挡圈131和台阶之间,这样使得轴承挡圈131和台阶对轴承形成限位,防止轴承与转轴030之间在轴向出现相对滑动,同时轴承的内圈也会夹紧在轴承挡圈131和台阶之间,使得轴承内圈与转轴030之间连接也更加牢固。
44.参见图2,由于轴承座安装在支座040上,为了保证转轴030与支座040内部相通,支座040上设有避让口141,转轴030穿过轴承座的一端伸入到支座040的避让口141中,使得转轴030内部与支座040内部相通。
45.进一步的,参见图2、图5,为了防止转轴030伸入避让口141一端的轴承挡圈131与避让口141相互干涉,在支座040的避让口141中设有间隔套132,间隔套132用来隔开轴承挡圈131与避让口141,当然避让口141大于轴承挡圈131的情况下则可省略间隔套132。
46.参见图2、、图3、图4、图5,第一信息采集模块2包括第一编码器020和第一齿形带021,第一编码器020的输入端设有第一齿轮120,第一转动部件3上设有传动齿,第一齿形带021的一端连接第一齿轮120,第一齿形带021的另一端连接第一转动部件3上的传动齿。
47.水平转动控制箱1进行灯光调节的过程中,控制箱1会与第一信息采集模块2一起做圆周运动,同时第一信息采集模块2会带动第一齿形带021,使得第一齿形带021围绕第一转动部件3做圆周运动,第一齿轮120会与第一齿形带021之间相对传动,第一齿轮120也跟着同步转动,这样控制箱1转动的角度能够被第一编码器020所采集到,而第一齿轮120转动的角度能够通过第一编码器020转化为电信号,然后传输给转动信号处理模块010,避免因控制箱1水平空转或打滑而导致光斑与控制动作不同步,所以追光控制转动过程中操控稳定性更好。
48.具体的,参见图3、图5,控制箱1的底部设有第一矩形孔,第一信息采集模块2上设有第一安装板121,第一编码器020和第一齿轮120分别位于第一安装板121的两侧,安装过程中,将第一编码器020伸入第一矩形孔并通过第一安装板121固定在控制箱1的底部,第一齿轮120露出在控制箱1的下方,从而将第一编码器020隐藏在控制箱1内部,这样一方面能够对第一编码器020形成保护,另一方面也方便第一编码器020与控制箱1上的转动信号处理模块010连接。
49.此外,在第一安装板121上设有第一调节孔,第一编码器020固定在第一调节孔中并能够在第一调节孔的行程范围内调节,这样能够调节第一齿形带021的松紧度。
50.参见图5,在一些实施例中,第一转动部件3上的传动齿为齿环133,第一齿形带021的一端套在齿环133上并与齿环133啮合。
51.具体的,齿环133为环状结构,齿环133的外壁设有齿口,齿环133安装在轴承座的顶部,控制箱1转动过程中,随着第一信息采集模块2带动第一齿形带021,第一齿形带021会在齿环133上进行边分离边啮合的圆周运动,同时第一齿形带021会与第一齿轮120啮合传动以带动第一齿轮120旋转,从而保证第一齿轮120与控制箱1同步转动,避免第一齿轮120与第一齿形带021之间出现打滑,通过啮合传动来保证传动关系的稳定性,保证第一齿轮120记录的控制箱1的转动角度精准。
52.此外,为了防止控制箱1超行程转动,在一些实施例中,齿环133上设有限位板134,法兰130上设有限位柱135,限位板134能够阻挡限位柱135。
53.具体的,限位板134为板状半圆环结构,限位板134安装在齿环133的端面上,齿环133上未安装限位板134的一半区域为行程区域,限位柱135安装在法兰130的下侧并向下延伸,控制箱1转动过程中会带动法兰130和转轴030转动,法兰130会带动限位柱135转动,当限位柱135转动到接触限位板134的端部时,限位板134会将限位柱135阻挡,阻止控制箱1进一步水平转动。
54.为了降低结构传递振动并提高动态稳定性,在一些实施例中,第一转动部件3上设有第一阻尼模块,第一阻尼模块设在转轴030与轴承组件031之间的转动接触面,具体的,第一阻尼模块设于限位板134与法兰130之间,且第一阻尼模块的两侧抵接限位板134与法兰130的相对面。
55.在另外一些实施例中,第一阻尼模块设在转轴030与基座4之间的转动接触面。
56.具体的,第一阻尼模块嵌入到转轴030远离法兰130一端的横截端面与支座040之间。
57.参见图8、图9、图10,驱动把手5包括连接杆6、锁紧装置7和握柄152,锁紧装置7包括相互铰接锁紧的第一锁紧件70和第二锁紧件71,第一锁紧件70与连接杆6锁紧配合,第二
锁紧件71与握柄152锁紧配合。
58.具体的,第一锁紧件70与连接杆6的端部锁紧配合,第二锁紧件71与握柄152的一端锁紧配合。
59.当需要调节握柄152与连接杆6之间的角度时,将第一锁紧件70与第二锁紧件71松开,然后转动握柄152,使得握柄152带动第二锁紧件71相对第一锁紧件70转动,转动到合适的角度之后再将第一锁紧件70与第二锁紧件71锁紧,这样使用者可以根据自身的操作姿势来选择握柄152的把持角度,符合人体工程学,使得操作更舒适,整体操作效果更佳。
60.在一些实施例中,握柄152与连接杆6之间的角度为135
°
。
61.参见图9、图13,第一锁紧件70包括第一锁扣700和第二锁扣701,第一锁扣700的两端设有向外延展的第一连接耳710,第一锁扣700的中部设有第一开口槽711。
62.第二锁扣701的两端设有向外延展的第二连接耳702,第二锁扣701的中部设有第二开口槽703,第一连接耳710与第二连接耳702对齐连接后,第一开口槽711与第二开口槽703组成夹紧连接杆6的圆形通道。
63.当需要沿着连接杆6的周向调节握柄152时,松开第一锁扣700与第二锁扣701,然后沿着连接杆6周向转动锁紧装置7和握柄152即可,当握柄152调节到位之后再将第一锁扣700与第二锁扣701锁紧。
64.在另外一些实施例中,第一锁紧件70上设有转向杆712,第二锁紧件71可拆卸安装在转向杆712上。
65.具体的,转向杆712竖直设置在第一锁扣700的顶部。
66.参见图9、图14,第二锁紧件71包括第三锁扣714和第四锁扣715,第三锁扣714的两端设有向外延展的第三连接耳716,第三锁扣714的中部设有第三开口槽718。
67.第四锁扣715的两端设有向外延展的第四连接耳717,第四锁扣715的中部设有第四开口槽719,第三连接耳716与第四连接耳717对齐连接后,第三开口槽718与第四开口槽719组成夹紧转向杆712的圆形通道。
68.当需要调节握柄152与连接杆6之间的角度时,松开第三锁扣714和第四锁扣715,第二锁紧件71连同握柄152一起围绕转向杆712转动一定角度,当角度调整合适之后再将第三锁扣714与第四锁扣715锁紧到转向杆712即可。
69.参见图10,在一些实施例中,连接杆6上固定有连接板150,连接板150用于固定在控制箱1上。
70.具体的,连接杆6上设有两个连接板150,两个连接板150沿着连接杆6的轴向间隔布置,两个连接板150用于固定在控制箱1的两侧,从而将驱动把手5固定在控制箱1上。
71.参见图10,在一些实施例中,连接杆6的端部背向连接板150的延展方向弯曲。
72.具体的,连接杆6的两端水平弯曲设置,连接板150竖向固定在连接杆6上,连接杆6的两端均设有锁紧装置7,每个锁紧装置7上锁紧装配一个握柄152,从而形成双手把持的驱动把手5。
73.参见图8、图9,在另外一些实施例中,连接杆6包括第一杆件051和第二杆件052,第一杆件051与第二杆件052之间通过连接件151互成夹角连接。
74.具体的,参见图9、图11、图12,第一杆件051和第二杆件052均为直杆结构,连接件151内部设有主通道,主通道在连接件151的前侧形成第一开口154,连接件151内部设有旁
通道,旁通道在连接件151的后侧形成第二开口155,第一杆件051的端部穿设在第二开口155中与连接件151固定,第二杆件052的一端穿设在第一开口154中与连接件151固定,第二杆件052的另一端通过第一锁扣700和第二锁扣701锁紧固定。
75.进一步的,第一杆件051上设有连接板150,具体的,第一杆件051上设有两个连接板150,两个连接板150沿着第一杆件051的轴向间隔布置,两个连接板150用于固定在控制箱1的两侧,从而将驱动把手5固定在控制箱1上。
76.在另外一些实施例中,连接件151通过固定板160可拆卸安装在连接板150上。
77.具体的,第一杆件051两端的连接件151均通过固定板160可拆卸安装在两个连接板150上,固定板160为直角板结构,固定板160的其中一边与连接板150通过螺钉连接,固定板160的另一边与连接件151通过螺钉固定连接。
78.进一步的,连接件151上设有多个安装孔,固定板160与连接件151上不同安装孔连接能够调节第一杆件051和第二杆件052之间的夹角。
79.具体的,连接件151的后侧设有第一安装面157和第二安装面158,第一安装面157和第二安装面158互成夹角,连接件151上设有第一安装孔和第二安装孔,连接件151上的第一安装孔与固定板160连接后,能够使得连接件151通过第一安装面157贴紧连接板150安装,连接件151上的第二安装孔与固定板160连接后,能够使得连接件151通过第二安装面158贴紧连接板150安装。
80.通过选择第一安装面157与连接板150贴合固定或者选择第二安装面158与连接板150贴合固定能够调整第一开口154的朝向,当从而实现第二杆件052与第一杆件051之间的夹角可调节,使得握柄152与第一杆件051之间的角度可调节,因此驱动把手5的摆向可选择连接件151、第一锁紧件70、第二锁紧件71其中至少一种来调节,实现握柄152把持方位的多级调节。
81.在本实用新型中,控制箱1内部设有连接轴9,连接轴9横穿在控制箱1内部,且连接轴9的两端分别伸出第一侧板012和第二侧板013,第一侧板012和第二侧板013上均设有轴承90与连接轴9配合。
82.连接轴9的两端分别伸出控制箱1的两侧,为了保证驱动把手5的操作稳定性,第二转动部件82分别跟驱动把手5的一端、连接轴9的一端固定连接,连接轴9的另一端与驱动把手5的另一端固定连接。
83.具体的,驱动把手5的一端通过第一连接块84与第二转动部件82固定连接,第一连接块84与连接轴9的伸出第一侧板012的一端固定连接,驱动把手5的另一端通过第二连接块85与连接轴9的伸出第二侧板013的一端固定连接。
84.第一侧板012和第二侧板013上均安装有轴承90,连接轴9装配在两个轴承中,且连接轴9的两端分别伸出第一侧板012和第二侧板013。
85.驱动把手5为两个单手把手050组成,其中一个单手把手050的基板150通过第一连接块84与第二转动部件82固定连接,第一连接块84与连接轴9伸出第一侧板012的一端固定连接,另一个单手把手050的基板150通过第二连接块85与连接轴9伸出第二侧板013的一端固定连接,这样驱动把手5与连接轴9连接更加牢固,驱动把手5操作过程中也更加稳定。
86.参见图3、图9,在一些实施例中,握柄152上设有滑动键153,滑动键153与基座4中电器元件的电连接。
87.为了方便布置滑动键153和基座4之间的连接线路,在一些实施例中,驱动把手5、连接轴9、控制箱1、第一转动部件3和基座4内部均设有彼此相通的布线通道,这样将整个线路都设在驱动把手5、连接轴9、控制箱1、第一转动部件3和基座4内部,整体外观看起来更加整洁,而且调节灯光控制器时也不会出现线束缠绕的问题。
88.具体的,握柄152为管状结构,握柄152上设有开口,滑动键153安装在握柄152的开口处,滑动键153可被配置成用于调节灯光控制器的亮度、缩放等参数,操控稳定性佳,使灯光的展示效果平滑过渡不突兀。
89.在图10所示的实施例中,连接杆6为管状结构,连接杆6弯曲的两端均设有第一通孔670,第一通孔670沿着连接杆6的周向延伸,第一锁扣700与第二锁扣701锁紧装配在第一通孔670处,且第一锁扣700上的第一开口槽711与第一通孔670相通,第一锁扣700上安装的转向杆712与第一开口槽711相通。
90.参见图13、图14,转向杆712上设有第二通孔713,第二通孔713沿着转向杆712的周向延伸,第三锁扣714和第四锁扣614锁紧装配在第二通孔713处,且第三开口槽718与第二通孔713相通。
91.第三锁扣714的中部设有安装通道720,握柄152的一端穿设固定在安装通道720中,握柄152穿设在安装通道720的一端设有开口,握柄152穿设固定到安装通道720之后,握柄152与第三开口槽718相通。
92.在图10所示的实施例中,连接杆6上还设有出口680,连接滑动键153的线路依次穿设在握柄152、锁紧装置7以及连接杆6中,然后从连接杆6上的出口680伸出并进入到连接轴9中,然后进入控制箱1中,控制箱1的部分线路经过第一转动部件3进入到基座4中。
93.参见图8、图9、图11、图12、图15,在另外的实施例中,第一通孔670设在第二杆件052一端,第二杆件052的另一端设有条形开口690,第二杆件052具有第一通孔670的一端夹紧装配在第一锁扣700与第二锁扣701之间,第二杆件052上的第一通孔670与第一开口槽711相通,第二杆件052具有条形开口690的一端穿设固定在连接件151中并与主通道相通,主通道在连接件151的第二安装面158上形成第三开口156,第三开口156与第一开口154相通,连接滑动键153的线路依次穿过握柄152、锁紧装置7、第二杆件052、连接件151后从第三开口156伸出再进入到连接轴9中。
94.需要说明的是,由于本技术中的驱动把手5为双把手结构,所以两个握柄152上均设有滑动键153,为了保证两个滑动键153之间的线路能够连通,在图8、图9所示的实施例中,连接件151上的旁通道与主通道相通,这样保证两个滑动键153的连接线路能够穿设在第一杆件051和连接件151中连通。
95.参见图9、图15,为了防止第一锁紧件70在第二杆件052上转动调节过程中损坏穿过第一通孔670的线束,第二杆件052上与第一通孔670相对的位置设有第一限位螺丝40,第一限位螺丝40能够限制第一锁紧件70在第二杆件052上的转动角度,避免第一锁紧件70在第二杆件052上360
°
旋转损坏线束。
96.同理,在转向杆712上相对第二通孔713的位置上设有第二限位螺丝41,第二限位螺丝41能够限制第二锁紧件71在转向杆712上的转动角度,避免第二锁紧件71在转向杆712上360
°
旋转损坏穿设在第二通孔713中的线束。
97.此外,由于驱动把手5的连接杆6、锁紧装置7、握柄152以及连接件151内部都是避
空设置,所以整个驱动把手5的质量也更轻,操控起来更加顺手,减轻手臂疲劳和驱动把手5自身的重量对灯光控制器的平衡性影响,无需在控制箱1中进行配重。
98.参见图3、图6、图7,第二信息采集模块8包括第二编码器80和第二齿形带81,第二编码器80的信号输入端安装第二齿轮800,第二转动部件82上设有传动齿,驱动把手5与第二转动部件82固定连接,第二齿形带81的一端连接第二转动部件82上的传动齿,第二齿形带81的另一端连接第二齿轮800。
99.具体的,第二编码器80安装在控制箱1上。
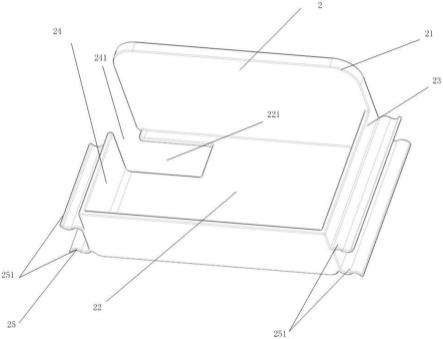
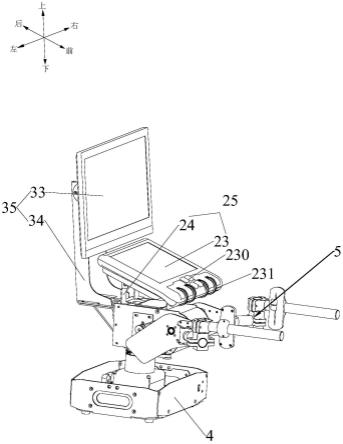
100.使用过程中,上下转动驱动把手5,使得驱动把手5带动第二转动部件82旋转,第二转动部件82旋转过程中会带动第二齿形带81,使得第二齿形带81带动第二编码器80信号输入端的第二齿轮800同步转动,第二编码器80能够记录第二齿轮800的转动角度并将第二齿轮800的角度转动信号转化成电信号,然后传输到转动信号处理模块010,避免驱动把手5上下空转或打滑而导致控制动作与光斑不同步,保证驱动把手5操作更加稳定。
101.在一些实施例中,第二信息采集模块8上设有第二安装板801,第二编码器80和第二齿轮800分别位于第二安装板801的两侧,控制箱1的第一侧板012上设有第二矩形孔,第二编码器80伸入第二矩形孔并通过第二安装板801固定在第一侧板012上,从而使得第二编码器80隐藏在控制箱1内部,第二齿轮800外露在控制箱1外部,这样能够对编码器形成保护。
102.进一步的,第二安装板801上设有第二调节孔,第二编码器80安装在第二调节孔中并能够在第二调节孔的行程范围内调节,这样能够调节第二齿形带81的松紧度。
103.在一些实施例中,连接轴9上径向开设有过线孔,连接轴9的一端轴向开设有过线通道,过线通道与过线孔相通,连接滑动键153的线束沿驱动把手5穿过第二转动部件82、过线通道和过线孔后进入控制箱1。
104.在另一些实施例中,还可以在连接轴9上径向开设过线孔,在连接轴9的两端均轴向开设过线通道,过线通道与过线孔相通。
105.在另外一些实施例中,转轴030的内部为中空结构,箱体011的内壁设有线槽,控制箱1的部分线束可沿转轴030连接至基座4的信号数据处理器,从而将线束隐藏在内部,整体装置的外观更加简洁,而且控制箱1转动过程中线束也不会发生缠绕。
106.为了防止驱动把手5上下摆动过程中出现超行程位移,第二转动部件82内部设有限位区间820,控制箱1上安装限位杆83,限位杆83伸入限位区间820。
107.具体的,限位区间820为开设在第二转动部件82上的扇形通孔结构,限位杆83的一端固定在控制箱1的第一侧板012上,限位杆83的另一端伸入限位区间820,通过驱动把手5带动第二转动部件82转动的过程中,当第二转动部件82的限位区间820转到接触限位杆83时,限位杆83就会阻挡第二转动部件82,防止第二转动部件82超行程位移,保证第二转动部件82只能在限位区间820的扇形区域内转动。
108.为了降低结构传递振动并提高动态稳定性,第二转动部件82上设有第二阻尼模块,第二阻尼模块位于第二转动部件82与控制箱1之间。
109.在一些实施例中,第二阻尼模块设在第一连接块84与第一侧板012之间并抵接第一连接块84与第一侧板012的相对面。
110.在另外一些实施例中,第二阻尼模块设在第二连接块85与第二侧板013之间并抵
接第二连接块85与第二侧板013的相对面。
111.为了防止连接轴9在控制箱1内轴向滑动,在一些实施例中,连接轴9的两端均设有沟槽,当连接轴9与第一侧板012上的轴承90以及第二侧板013上的轴承90装配好之后,在沟槽中装配轴承挡圈91,通过轴承挡圈91对装配在连接轴9上的轴承90进行限位,防止连接轴9相对轴承轴向滑动。
112.参见图1、图3,在一些实施例中,本技术还包括交互模块25,交互模块25包括第一支架24和触控屏23,触控屏23通过第一支架24安装在控制箱1上。
113.在一些实施例中,触控屏23相对于第一支架24的倾斜角度可调节。
114.在一些实施例中,交互模块25与基座4内部的信号数据处理器连接的线束也是穿设在转轴030中。
115.触控屏23上设有按压键230和第三编码器,按压键230用于授予或解除第一信息采集模块2以及第二信息采集模块8的操作权限,使用过程中,通过按压键230可在控制台和灯光控制器中来回切换控制权限,解除权限再松手,握持后再授予权限,避免释放、接触驱动把手5的瞬间产生发生突变,同时也可避免误碰误撞、自身重力、风吹等引起的失误操作。
116.此外,第三编码器的输入端安装第三滚轮231,第三滚轮231用于调节灯光参数。
117.具体的,第三齿轮231设有四个,四个第三齿轮231可被配置成用于调节雾化、光圈、调焦、色温,由于这些参数在触控屏23中细微增益难以掌控,往往调节过大或过小,导致最终展示效果突兀,不适于触控操作,使用第三齿轮231进行操控时,稳定性更佳,展示效果平滑过渡不突兀。
118.需要说明的是,交互模块25与基座4内部的信号数据处理器连接的线束也是穿设在转轴030中。
119.此外,灯光控制器还包括监控模块35,监控模块35包括第二托架34和显示屏33,第二托架34固定在控制箱1的侧边,显示屏33安装在第二托架34上。
120.在一些实施例中,显示屏33相对于第二托架34的倾斜角度可调节。
121.当然,本技术并不局限于上述实施方式,熟悉本领域的技术人员在不违背本实用新型精神的前提下还可作出等同变形或替换,这些等同的变型或替换均包含在本技术权利要求所限定的范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。